Изобретепие относится к области станкостроения и автоматики.
Известны следящие приводы, выполненные в виде замкнутого агрегата, имеющего источник питания и золотники управления, силовой ципннлр : гибким щтоком, устройство сравнени; сигналов управления и обратную связь. Они служат для сравнительно небольших хоД(,В исполнительных механизмов и-небольших 11сполн11тельных тяговых усилий, вследствие применения в качестве гибкого штока струны, диаметр которой ограничен условиел требуемой гибкости, а также вследствие использования одпокаскадного гидравлического усилителя, мощность которого ограиичивается монл,ностыо входного сигнала. В подобных нриводах отсутствует также возможность мультинликации двил сения.
В предлагаемом устройстве с целью создания надежного и быстродействующего беструбного гидравлического следящего привода длиппокодовых исполнительных механизмов со значительными тяговыми усилителями исполнительного движения независимая автономная система питания и уиравления каждой из полостей исполнительного механизма с гибким штоком выполнена в виде двухкаскадного гидроусилителя, представляющего собой, например, подпружиненный управляющий золотник с полостями, соединенными каналами
между собой и через клапаны - с резервуарами, и маятннковый распределитель с полостямн, соединенными с иолостями управляющего золотннка и соответствующей полостью исполнительного механизлга, а через предохранительный клапан - с резервуаром.
Гибкий шток выполнен в виде металлической леиты и уплотнен чередующимся набором шайб из бронзы, фетра и фторопласта, центрирующихся на панравляющих штифтах и поджатых . гайкой.
С целью обеспечения мультипликации исполнительного движения на диске обратной связи нанесена программа в виде концентрических дорожек с различной плотностью информации, считываемой головкой, положение которой устанавливается в зависи.мости от требуемого масштаба перемещения.
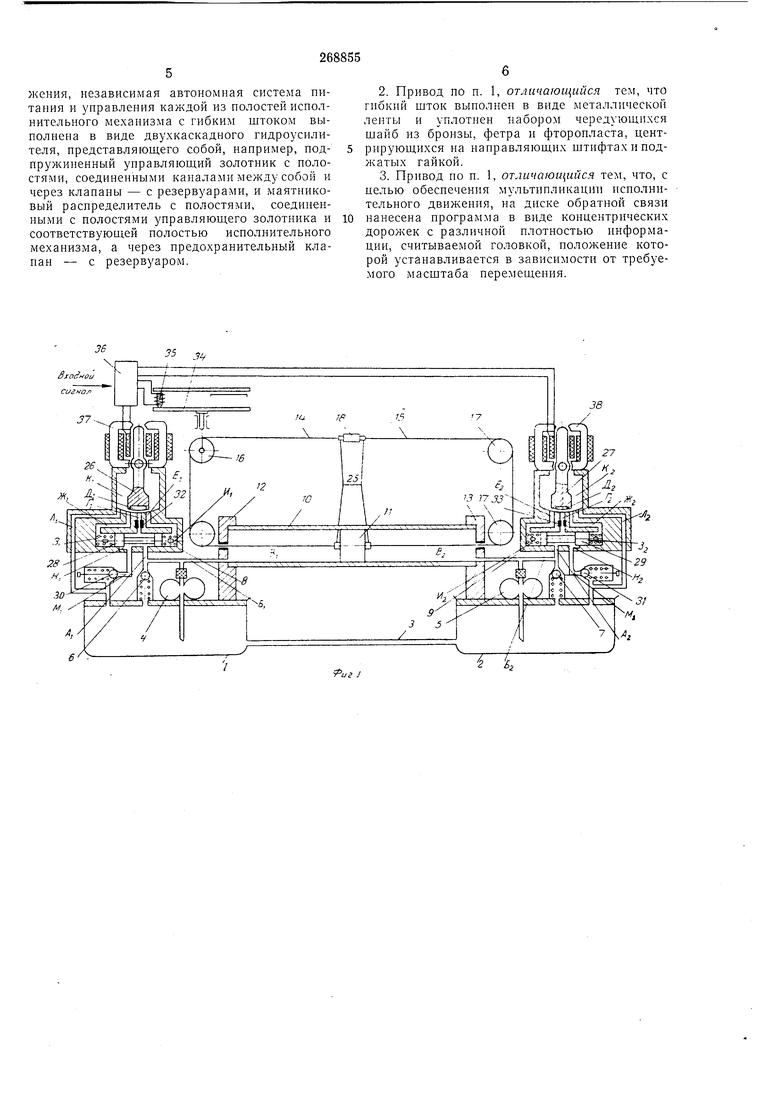
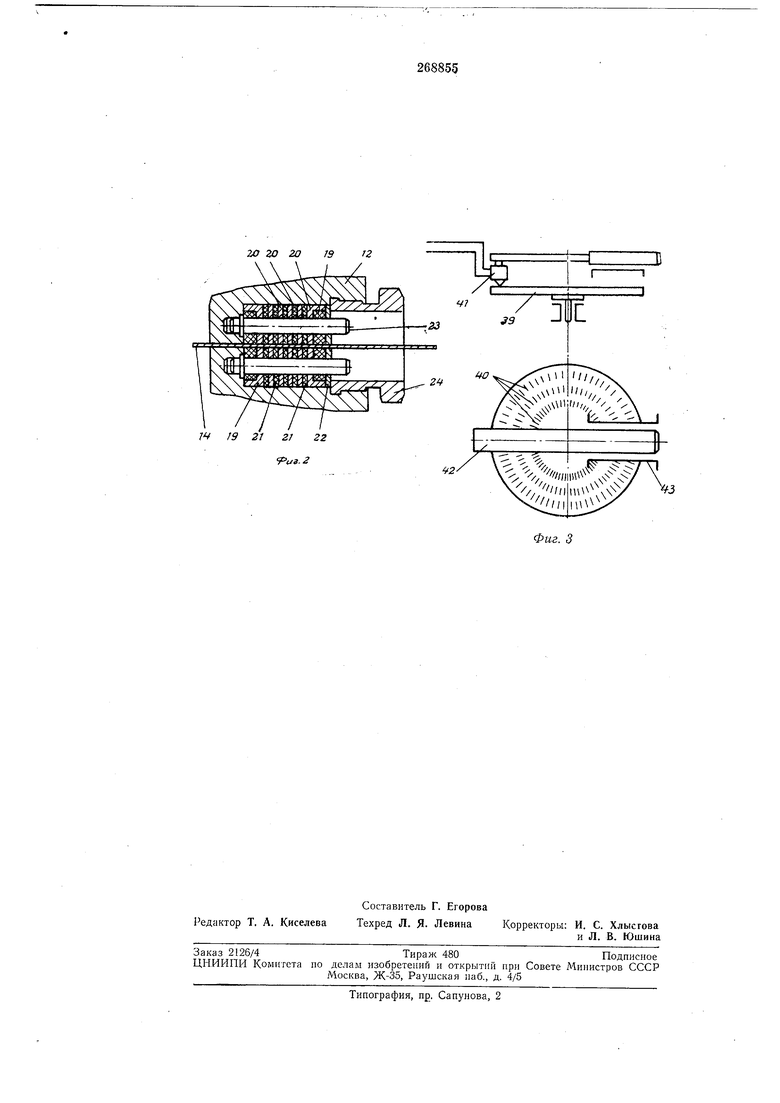
На фиг. 1 гзображен предлагаемый механизм, состоящий из гидравлической и электрической частей; на фиг. 2 - уплотнение гибких штоков; на фиг. 3 - блок обратиой связи.
Гидравлическая часть привода содержит два резервуара J и 2 с рабочей жидкостью, соединенные для выравнивания уровней трубопроводом 3. В корнусах резервуаров размещены питающие насосы - и 5 и предохранительные клапаны 6 и 7, соединенные каналами AI и AZ с агрегатами управления 5 и Я а каналами EI и 2 - С полостями BI и BZ исполнительного механизма.
Гидравлический исполнительный механизм содержит цилиндр 10 с поршнем 11, который образует полости б) и 2 с кронштейнами 12 и 13. Поршень через гибкие штоки 14 и 15, выполненные, например из металлической ленты, через систему роликов 16 и 17 передает усилие иа нагрузочное устройство 18. Уплотнение гибких штоков в местах выхода их из силового цилиндра осуществляется нутем унлотнения металлической ленты в кронштейне 12 специальным набором фетровых 19, бронзовых 20, фторопластовых 21 шайб и металлической шайбы 22, центриру1ош,ихся на двух штифтах 23 и поджатых гайкой 24. К поршню и нагрузочному устройству гибкие штоки крепятся самозаклиниваюшими зажимами 25.
Питание и управление полостями исполнительного механизма осуществляются автономно двумя насосами и двумя агрегатами управления. В корпусе каждого агрегата размещены маятниковый распределитель 25 (27)-первый каскад следящей системы, золотник управления 28 (29) - второй каскад; клапан 30 (31) регулировки слива, лсиклер 32 (33) и ряд просверленных каналов, соединяющихся в осевой цилиндрической проточке.
Предлагаемый привод имеет механизм обрат 1ой связи по перемен1,ению или положению, состоящий из вращающегося магнитного диска 34, на котором нанесена информацияо перемещении поршня, считываемая магнитной головкой 35 и передаваемая в блок сравнения 36.
Гидравлический следящий привод имеет одно нейтральное и два рабочих положеиия.
В нейтральном положении независимые друг от друга маятниковые распределители 26 и 27 агрегатов управления 5 и 9 находятся в состоянии покоя, и циркуляция жидкости осуществляется по следующему контуру для агрегата управления 8: резервуар 1, насос 4, трубопровод Ль центральная проточка управляющего золотника 28, жиклер 2,/канал FI, полость Дь каналы 1 и Ж: (в полостях 3 и MI устанавливается одинаковое предварительное давление рабочей жидкости). Частично рабочая жидкость из полости Д{ через каналы и Ж} поступает в полость и по каналу Л1 - в резервуар. Рабочая жидкость от насоса 4 по каналу Б ноступает в полость В исполнительного механизма и по каналу AI, осевой проточке золотника, через канал MI, клапан 30 - на слив. Клапан 30 отрегулирован так, чтобы в полости BI поддерживалось минимальное подпорное давление слива.
Для агрегата управления работа осуществляется аналогично.
При этом в нолостях BI и BZ исполнительного механизма устанавливается одинаковое давление рабочей жидкости, норшень 11 и нагрузочное устройство 18 находятся в нейтральном положении.
Входной сигнал от задающего устройства подается в блок сравнения 36, который подает команду на электромеханические преобразователи 37 и 38, отклоняющие маятниковые раснределители 26 н 27, кромки которых открывают соответственно каналы Ж и Жг, сообщая полости 3i и 32 каналами Ж и Ж2 с полостями К и K.Z, каналами Л i Л - с резервуарами. Каналы Г и FZ сообщаются через каналы EI и EZ с полостями MI и HZ, в которых давление рабочей жидкости возрастает, а управляющие золотники 28 и 29 смещаются вправо. При этом в агрегате управления возрастает открытие окна HI, связанного каналом MI через клапан 30 с резервуаром, а каналом 5i - с нолостью BI иснолнительного механизма, давление в которой падает вследствие умепьшения потери давления на окне Н. В агрегате управления нрикрывается окно HZ, связанное каналом MZ через клапан 31 с резервуаром 2 и,каналом BZ с полостью BZ исполнительного механизма, давление в которой поднимается. В результате возросшего перепада давления поршень // переместится влево вместе с гибкими штоками, которые, обкатываясь по роликам, перемещают нагрузочное устройство внраво.
Одновременно от поворота ролика 16 под воздействием гибкого штока 14 поворачивается магнитный диск 34 относительно магнитной головки 55, вырабатывая сигнал обратной связи, который ноступает на блок сравнения 36.
Окна HI и HZ спрофилированы так, что, по мере перекрытия их кромками управляющих золотпиков, расход жидкости увеличивается или уменьшается по определенному закону, что сказывается на скорости перемещения норшня и нагрузочного устройства. Перемещение нагрузочного устройства влево осуществляется в обратной последовательности.
Блок обратной связи выполнен из магнитного диска 39 с нанесенной на нем информацией в виде доролсек 40, считывающей головки 41, закрепленной на дерлсателе 42 и перемещающейся в направляющих 43.
Предмет изобретения
1. Гидравлический следящий привод, выполненный в виде замкнутого агрегата с обратной связью, в котором входной сигнал от задающего устройства через блок сравнения и электромеханический преобразователь подается на золотник управления силовым гидравлическим цилиндром исполнительного механизма с гибким штоком, каждая полость которого снабжена независимой автономной системой питания и управления, и далее - на диск обратной связи со считывающим устройством, отличающийся тем, что, с целью создания надежного и быстродействующего гидравлического следящего привода длинноходовых иснолнительных механизмов со значительными тяговыми усилиями исполнительного движения, независимая автономная система питания и унравления каждой из полостей исполнительного механизма с гибким штоком выполнена в виде двухкаскадного гидроусилителя, представляющего собой, например, подпружиненный управляющий золотник с полостями, соединенными каналами между собой и через клапаны - с резервуарами, и маятниковый раснределитель с полостями, соединенными с полостями управляющего золотника и соответствующей полостью исполнительного механизма, а через предохранительный клапан - с резервуаром.
2.Привод по п. 1, отличающийся тем, что гибкий щток вынолнен в виде металлической ленты и уплотнен набором чередующихся щайб из бронзы, фетра и фторопласта, центрирующихся на направляющих щтифтах и поджатых гайкой.
3.Привод по п. 1, отличающийся тем, что, с целью обеспечения мультипликации исполнительного движения, на диске обратной связи нанесена программа в виде концентрических дорожек с различной плотностью информации, считываемой головкой, положение которой устанавливается в зависимости от требуемого масштаба перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1970 |
|
SU261079A1 |
| ГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1973 |
|
SU386157A1 |
| МНОГОКАНАЛЬНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1972 |
|
SU335446A1 |
| ГИДРАВЛИЧЕСКОЕ РУЛЕВОЕ УПРАВЛЕНИЕ СЛЕДЯИ^РвТИПА | 1964 |
|
SU165987A1 |
| Е. П. И. П. Каньшин и С. F. Соломко:;ai;_^рсаков,' иыз'?,:--.:^Б*;Е.Г!10~:':.;,ВОЗДУШНЫЙ винт | 1966 |
|
SU184147A1 |
| ГИДРАВЛИЧЕСКАЯ ПОЗИЦИОННАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ | 1973 |
|
SU393486A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ЦИФРОВЫМ УПРАВЛЕНИЕМ | 1973 |
|
SU393481A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДААВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ | 1972 |
|
SU427885A1 |
| ЦЕНТРОБЕЖНО-ГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР | 1967 |
|
SU201833A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПА | 1967 |
|
SU198147A1 |
W ZO 2О 792 ..ж .
