12 1
15
i Изобретение относится к средствам гИдропневмоавтоматики, в частности к циф- р|овым приводам, и может быть использо- йано в механизмах дискретного переме- фения.
Цель изобретения - повышение быстродействия и надежности привода. На чертеже представлена принципиальная пневмогидравлическая схема привода.
Пневмогидравлический цифровой привод додержит магистрали нагнетания 1 и слива 2, 1у1ногопозиционный пневмоцилиндр 3 с последовательно расположенными с образованием 1|)абочих 4-6 и возвратной 7 полостей шоршнями 8-10 и штоком 11. Поршни имеют соответствующие ходы S2S и 4S. Демпфируюш,ее устрйство включает дешиф- ратор 12, тормозной гидроцилиндр 13 и обратные клапаны 14 и 15. По образую- цей гидроцилиндра 13 с шагом S выпол- 1ены окна 16-23, которые соединены с зходными каналами 24-31 дешифратора 12. 5 гидроцилиндре 13 установлен поршень 32 с двухсторонним штоком 33 с образованием тормозных полостей 34 и 35. Шток 33 ркестко связан со штоком 11. В дешиф- IpaTope размешены разрядные золотники 36- 138, через которые его входные каналы |24-31 могут последовательно соединяться с выходным каналом 39. Кроме того, привод снабжен двухпозиционным трехлинейным :распределителем 40 с управлением от электромагнитов 41 и 42 и реле 43 давления, на подвижной части которого закреплен замыкаюший контакт, а его выходной электрический контакт соединен с электромагнитом 41 и источником питания (не показан) при этом распределитель 40 установлен с возможностью подключения возвратной полости 7 к магистралям нагнетания 1 и слива 2, а реле 43 давления подключено к тормозной полости 35.
Привод работает следующим образом.
В исходном положении возвратная полость 7 соединена с магистралью 1 нагнетания через распределитель 40, рабочие полости 4 и 5 соединены с атмосферой и управляюш.ие сигналы на золотники 36-38 отсутствуют, что соответствует комбинации сигналов 1000, где символ 1 означает наличие, а символ О - отсутствие управляющего сигнала. При этом три младших разряда кодовой комбинации управляющих сигналов определяют состояние рабочих полостей 4-6 и золотников 36-38, а значащая цифра старшего разряда определяет состояние возвратной полости 7. При этом штоки 11 и 33 занимают крайнее левое положение (по чертежу), а окно 16 перекрыто поршнем 32.
Далее поступает, например, комбинация управляющих сигналов 0001. Рабочая среда подается в рабочую полость 4 и на вход золотника 36, а полость 7 через распределитель 40 сообщается с атмосферой. При этом на электромагнит 42 сигнал подается в виде кратковременного импульса напряжения, а золотник 36 занимает крайнее правое положение (по чертежу), соеди- няя окно 17 с выходным каналом 39. Под действием перепада давлений шток 11 вместе со штоком 33 и поршнем 32 перемещаются вправо на величину S. При подходе штока 11 в заданную позицию поршень 32 перекрывает окно 17, вследствие
0 чего увеличивается давление в тормозной полости 35 и штоки 11 и 33 останавливаются. Увеличение давления до заданного уровня приводит к срабатыванию реле 43 и его замыкающий контакт замы кает выходной электрический контакт. Напряжение питания подается на электромагнит 41, который, срабатывая, переключает распределитель 40. При этом давление питания подается в полость 7, что ускоряет процесс торможения и исключает выбег
0 штока 11. После фиксированного останова штока 11 ввиду наличия отрицательного перекрытия между поршнем 32 и окном 17 давление в полости 35 падает, контакты размыкаются и, следовательно, отключается электромагнит 41.
При переключении, например, комбинации управляющих сигналов 1001 и 1110 давление питания подается одновременно в рабочие полости 5 и 6 пневмоцилиндра 3 и в управляющие полости (не обозначены) золотников 37 и 38 дешифратора 12 и соединяются с атмосферой полости 4 и 7 пневмоцилиндра 1 и управляющая полость золотника 36 дещифратора 12. При этом золотники 36-38 дещифратора 12 переключаются и соединяют окно 20 гидроцилиндс ра 13 с выходным каналом 39 дешифратора 12. Под действием давления питания в полостях 5 и 6 поршни 8-10 перемещаются до соответствующих упоров, причем суммарная величина перемещения выходного штока 11 вправо равняется 6S.
0 При перемещении штока 11 и связанного с ним поршня 32 жидкость из полости 35 через окно 22, каналы 30 и 39 и обратный клапан 14 вытесняется в полость 34. При подходе выходного штока 11 к заданной позиции поршень 32 перекрывает окно 22 и вследствие этого увеличивается давление в полости 35 тормозного гидроцилиндра 13, а щток 11 плавно тормозится. При достижении заданного давления в полости 35 реле 43 давления замып кает контакты и, следовательно, включается электромагнит 41 и давление питания подводится в полость 7, что ускоряет процесс демпфирования и исключает возможность выбега штока 11. При фиксированном останове штока 11 давление в полости 35
5 падает, реле 43 размыкает контакты, следовательно, электромагнит 41 отключается. Аналогично работает привод и при отработке других кодовых комбинаций, определяю5
щих прямое перемещение выходного штока 11.
При отработке управляющих сигналов, определяющих обратное перемещение щтока 11 (движение влево) подается команда только на переключение рабочих полостей 4-6 пневмоцилиндра 3 и золотников 36-38 дещифратора 12. Команда на включение электромагнита 42 распределителя 40 не подается, т. е. возвратная полость 7 постоянно запитана давлением питания.
Технико-экономическая эффективность от использования предлагаемого привода заключается в повыщении быстродействия и нагрузочной способности, что в значительрабочих и возвратной полостей поршнями и штоком, демпфирующее устройство, включающее дешифратор, тормозной гидроцилиндр с окнами, выполненными по образующей, и поршнем со штоком, размещенным в нем с образованием тормозных полостей, при этом штоки пневмо- и гидроцилиндров жестко связаны между собой, окна тормозного гидроцилиндра соединены с входными каналами дешифратора, а его
inч
- выходной канал через обратные клапаны связан с тормозными полостями, отличающийся тем, что, с целью повышения быстродействия и надежности, привод снабжен двухпозиционным трехлинейным распре- ной мере расширяет область его применения. .|5 делителем с электромагнитным управлением
и реле давления, при этом распредеФормула изобретениялитель установлен с возможностью подключения возвратной полости к магистралям
Пневмогидравлический цифровой привод,нагнетания и слива, реле давления подсодержащий магистрали нагнетания и слива,ключено к одной из тормозных полостей,
многопозиционный пневмоцилиндр с последо- 20 а его выходной электрический контакт сое- вательно расположенными с образованиемдинен с электромагнитом распределителя.
рабочих и возвратной полостей поршнями и штоком, демпфирующее устройство, включающее дешифратор, тормозной гидроцилиндр с окнами, выполненными по образующей, и поршнем со штоком, размещенным в нем с образованием тормозных полостей, при этом штоки пневмо- и гидроцилиндров жестко связаны между собой, окна тормозного гидроцилиндра соединены с входными каналами дешифратора, а его
ч
выходной канал через обратные клапаны связан с тормозными полостями, отличающийся тем, что, с целью повышения быстродействия и надежности, привод снаб
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВОЙ ГИДРАВЛИЧЕСКИЙ БЛОК ПИТАНИЯ МОБИЛЬНОЙ МАШИНЫ | 2004 |
|
RU2277188C2 |
| Гидравлический привод | 1981 |
|
SU1059286A1 |
| Гидравлический привод | 1983 |
|
SU1143890A1 |
| Автоматический станок для обработки поршневых колец | 1984 |
|
SU1161306A1 |
| САМОХОДНАЯ МАШИНА С ОБЪЕМНОЙ ГИДРОПЕРЕДАЧЕЙ | 2002 |
|
RU2241609C2 |
| Пневматический привод | 1988 |
|
SU1596142A1 |
| Пневмогидравлический цифровой привод | 1980 |
|
SU943445A1 |
| Следящий гидропривод | 1982 |
|
SU1097517A1 |
| Литьевая машина | 1986 |
|
SU1361006A1 |
| Устройство управления многоступенчатой передачей транспортного средства | 1985 |
|
SU1341072A1 |
изобретение м. б. использовано в механизмах дискретного перемещения. Цель изобретения - повышение быстродействия J 4 fl 59 6 Ю 7 I И надежности привода. Для этого он снабжен двухпозиционным трехлинейным распределителем (Р) 40 с управлением от электромагнитов 41, 42 и реле 43 давления. Р 40 установлен с возможностью подключения возвратной полости 7 к магистрали 1 н 2 нагнетания и слива. Реле 43 подключено к тормозной полости 35, а его выходной электрический контакт соединен с электромагнитом 41 и источником питания. При достижении заданного давления в полости 35 реле 43 срабатывает, замыкая контакт и переключая Р 40. При этом давление питания подается в по. юсть 7, что ускоряет процесс торможения и исключает выбег Н1тока 11. 1 ил. 33 « с о. с/ с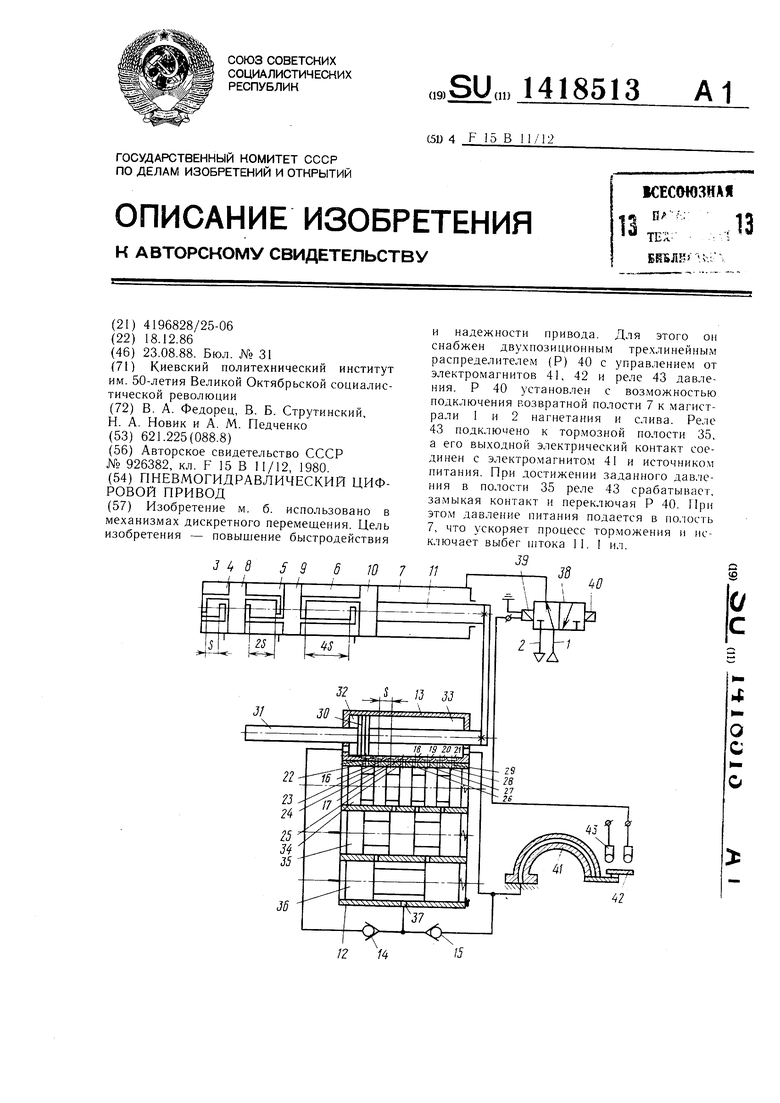
| Пневмогидравлический цифровой привод | 1980 |
|
SU926382A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
