Изобретение относится к стендам для определения управляемости переносных бензиномоторных пил и может быть использовано в машиностроении, лесном хозяйстве и лесной промышленности.
Целью изобретения является упрощение конструкции и повышение удоб- эксплуатации,
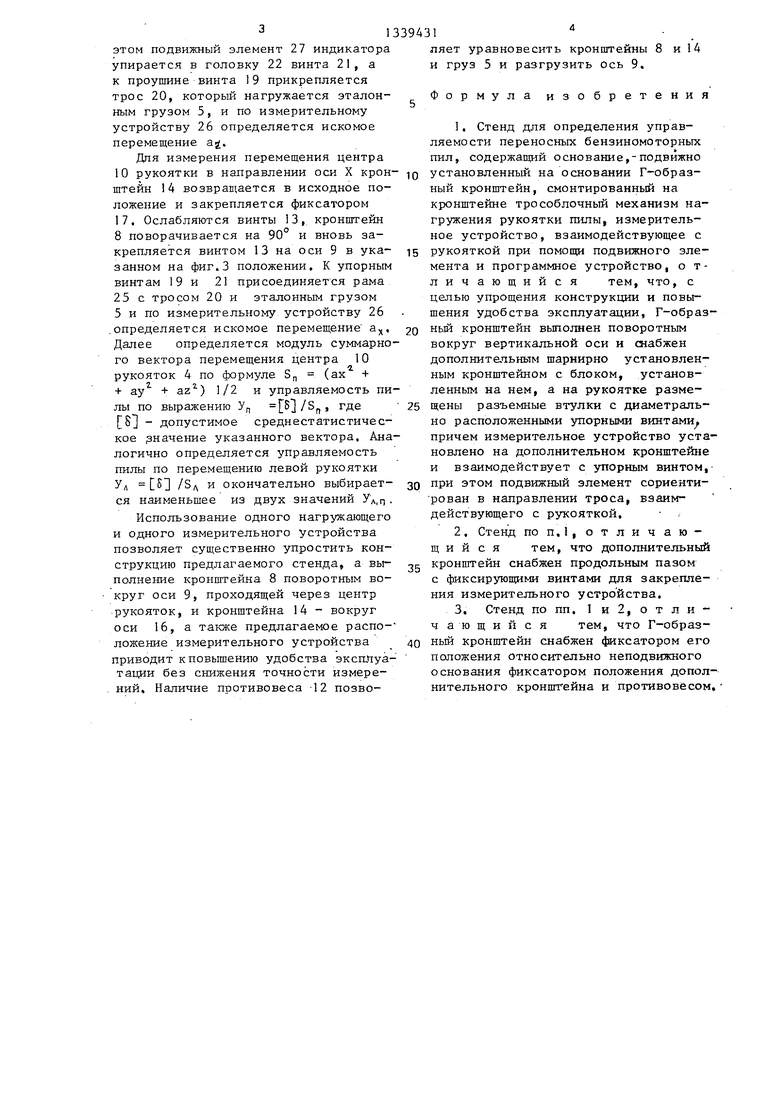
На фиг.1 изображен стенд для опре- .деления управляемости переносных бензиномоторных пил, вид сзади (измере™ ние по оси У); на фиг, 2 - то же, - измерение по оси Z; на фиг.З - то же, сбоку (измерение по оси X); нафиг,4 - сечение А-А на фиг.З; на фиг, 5 - сечение Б-Б на фиг,1. .
Стенд для определения управляемости переносных бензиномоторных пил включает двигатель 1 с пильным аппаратом 2 j опорную раму 3 с рукоятками 4, эталонным грузом 5, рама соединена с двигателем упругими элементами 6, содержит неподвижное основание 7 и Г-образный кронштейн 8, выполненный поворотным на 90 вокруг вертикальной оси 9, проходящей через центр 10 рукояток 4 и снабженньп фиксатором 11 его положения относительно основания 7, Г-образный кронштейн 8 имеет Противовес 12 и зажимные винты . 13 для жесткого соединения с о сью 9, На Г-образном кронштейне 8 установлен
10
установки индикатора 26 кронштейн 14 снабжен продольным пазом 28 с фикси- руюш;ими винтами 29 и гайками 30, Измерительное устройство 26 посреди ством подвижного элемента 27 взаимодействует в зависимости от направления измерения с одним из упорных винтов 24 или 21, Нагружение рукоятки 4 производится эталонным грузом 5 массой 1 кг посредством троса 20, Стенд работает следующим образом. Мотопила жестко закрепляется на неподвижном основании 7, На последуе-; мую рукоятку 4 закрепляется разъемная втулка 18 так, чтобы винты 19 и 21 располагались вертикально (фиг,4), Заворачивая винты 19 и 21, перфорируют полимерное покрытие 23 до соприкосновения этих винтов с рукояткой 4, В необходимых случаях в рукоятках 4 сёерлятся дополнитель15
20
ные отверстия, в которые вводятся
винты 19 и 21, Это исключает переме- 25 имение втулки 18 относительно рукояток 4, что повышает точность измерения, Бинт 24 устанавливается в разъеме втулки 18,
Кронштейн 8 устанавливается так, 30 чтобы вертикапьная ось 9 проходила через центр 10 рукояток 4, Для этого в отверстие винта 21 вводится специальный удлинитель оси 9 (не показан). Основание оси 9 жестко задополнительный кронштейн 14 с блоком 35 Репляется на неподвижном основании 15 при помощи шарнира 16, ось которо- 7 кронштейн 8 закрепляется на оси
9зажимными винтами 13 (фиг,1).
:го расположена параллельно оси рукоятки 4 (фиг, 1 и 2), Кронштейн 14 имеет возможность поворота на 90 и снабжен фиксатором 17 его положения относительно Г-образного кронш.теина 8, На рукоятке 4 размещена разъемная втулка 18 (фиг,4) с ра- диально расположенными упорными винтами 19, один из которых выполнен с проушиной для закрепления троса 20, а винт 21 - со сферической головкой 22, Винты 1.9 и 21 входят в соприкосновение с рукояткой 4, перфорируя полимерное покрытие 23, В разъеме втулки 18 установлен винт 24 со сферической головкой. При измерении по оси X к винтам 19 и 21 присоединяется рамка 25 (фиг,3). Измерительное устройство 26, например индикатор часового типа, устанавливается на допол1штельном кронштейне 14 так, чтобы его подвижньй элемент 27 бьш параллелен тросу 20, Дпя удобства
10
3943Г2
установки индикатора 26 кронштейн 14 снабжен продольным пазом 28 с фикси- руюш;ими винтами 29 и гайками 30, Измерительное устройство 26 посреди ством подвижного элемента 27 взаимодействует в зависимости от направления измерения с одним из упорных винтов 24 или 21, Нагружение рукоятки 4 производится эталонным грузом 5 массой 1 кг посредством троса 20, Стенд работает следующим образом. Мотопила жестко закрепляется на неподвижном основании 7, На последуе-; мую рукоятку 4 закрепляется разъемная втулка 18 так, чтобы винты 19 и 21 располагались вертикально (фиг,4), Заворачивая винты 19 и 21, перфорируют полимерное покрытие 23 до соприкосновения этих винтов с рукояткой 4, В необходимых случаях в рукоятках 4 сёерлятся дополнитель15
20
ные отверстия, в которые вводятся
35 Репляется на неподвижном основании 7 кронштейн 8 закрепляется на оси
40
9зажимными винтами 13 (фиг,1).
Для измерения перемещения центра
10рукояток 4 в направлении оси У ортогональной системы координат, началом которой служит центр 10 рукояток 4, а одна из осей X совпадает
с осью одной из рукояток 4, дополнительный кронштейн 14 закрепляется на . кронштейне 8 при помощи фиксатора 17 (фиг,1). Измерительное устройство 26 устанавливается на кронштейне 14 на необходимом расстоянии от упора 24 и закрепляется гайками 30, К втулке 18 прикрепляется трос 20, нагружается эталонным грузом 5 и по измерительному устройству 26 определяется искомое перемещение a,j,
Для измерения перемещения центра 55 О рукоятки в направлении оси z
ослабляется фиксатор 17 и дополнительный кронштейн 14 с блоком 15 повораО
чивается на 90 в шарнире 16 и вновь закрепляется к кронштейну В При
50
этом подвижный элемент 27 индикатора упирается в головку 22 винта 21, а к проушине винта 19 прикрепляется трос 20, который нагружается эталонным грузом 5, и по измерительному устройству 26 определяется искомое перемещение а.
Для измерения перемещения центра 10 рукоятки в направлении оси X кронштейн 14 возвращается в исходное положение и закрепляется фиксатором 17. Ослабляются винты 13, кронштейн 8 поворачивается на 90° и вновь закрепляется винтом 13 на оси 9 в указанном на фиг.З положении. К упорным винтам 19 и 2 присоединяется рама 25 с тросом 20 и эталонным грузом 5 и по измерительному устройству 26 определяется искомое перемещение а. Далее определяется модуль суммарного вектора перемещения центра 10 рукояток 4 по формуле 5„ (ах + + ау + az) 1/2 и управляемость пилы по выражению УГ, ,, где S - допустимое среднестатистическое эначение указанного вектора. Аналогично определяется управляемость пилы по перемещению левой рукоятки УЛ 51 /Зд и окончательно выбирается наименьшее из двух значений Уд.п .
Использование одного нагружающего и одного измерительного устройства позволяет существенно упростить конструкцию предлагаемого стенда, а выполнение кронштейна 8 поворотным вокруг оси 9, проходящей через центр рукояток, и кронштейна 14 - вокруг оси 16, а также предлагаемое распо- ложение измерительного устройства риводит к повышению удобства эксплуатации без снижения точности измере- НИИ, Наличие противовеса -12 позволяет уравновесить кронштейны 8 и 14 и груз 5 и разгрузить ось 9.
Формула изобретения
1.Стенд для определения управляемости переносных бензиномоторных пил, содержаш 1Й основание,-подвижно
Q установленный на основании Г-образ- ный кронштейн, смонтированный на кронштейне трособлочный механизм на- гружения рукоятки пилы, измерительное устройство, взаимодействующее с
5 рукояткой при помощи подвижного элемента и программное устройство, о т- личающийся тем, что, с целью упрощения конструкции и повы- щения удобства эксплуатации, Г-образ0 ньй кронштейн выполнен поворотным вокруг вертикальной оси и снабжен дополнитальным шарнирно установленным кронштейном с блоком, установленным на нем, а на рукоятке разме5 щены разъемные втулки с диаметрально расположенными упорными винтами причем измерительное устройство установлено на дополнительном кронштейне и взаимодействует с упорным винтом,0 при этом подвижный элемент сориенти- рован в направлений троса, взаим- действующего с рукояткой.
2.Стенд по п.1, отличающий с я тем, что дополнительный
g кронштейн снабжен продольным пазом с фиксирующими винтами для закрепления измерительного устройства.
3.Стенд по пп. 1 и 2, отличающийся тем, что Г-образ0 ньй кронштейн снабжен фиксатором его положения относительно неподвижного основания фиксатором положения дополнительного кронштейна и противовесом,
/ХХИ/С
Фиг.2
Д
X
J У....ДнУ1±н/ А
/ //////
Фиг.З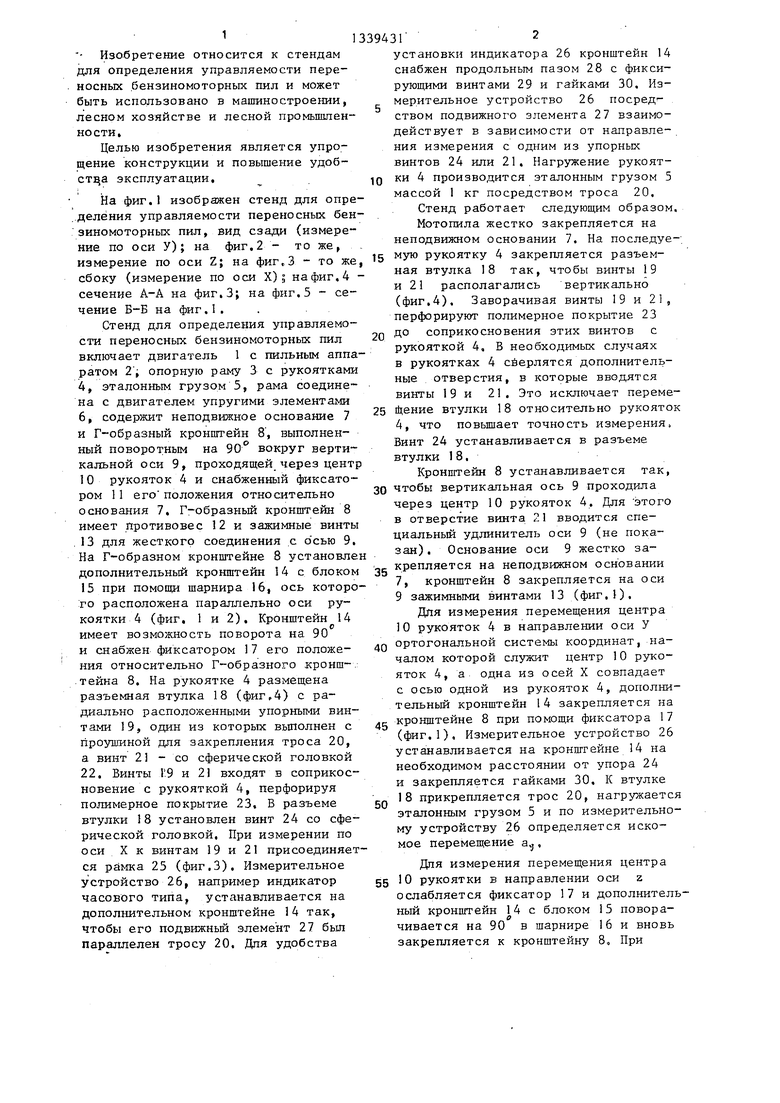
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания бензомоторных пил | 1990 |
|
SU1749757A1 |
| Стенд для определения управляемости переносных бензиномоторных пил | 1986 |
|
SU1553876A1 |
| Способ испытания переносных моторных пил | 1988 |
|
SU1640575A1 |
| Нажимное устройство к стендудля иСпыТАНия МЕХАНизиРОВАННыХиНСТРуМЕНТОВ | 1976 |
|
SU845029A1 |
| Переносная моторная пила | 1988 |
|
SU1556901A1 |
| Силовой тренажер | 1989 |
|
SU1720665A1 |
| Стенд для испытания переносных моторных пил | 1991 |
|
SU1799728A1 |
| Силовой тренажер | 1990 |
|
SU1824208A1 |
| БЕНЗИНОМОТОРНАЯ ПИЛА | 1996 |
|
RU2109624C1 |
| Имитатор динамических свойств руки оператора к стенду для испытаний мотопил | 1988 |
|
SU1569648A1 |
Изобретение относится к лесному хозяйству и лесной промьшшенности. Цель изобретения - упрощение конструкции и повышение удобства эксплуатации. Стенд содержит основание, на котором закреплен двигатель 1 с пильным аппаратом и опорной рамой 3 с рукоятками 4 эталонным грузом. Рама 3 соединена с двигателем I посредством упругих элементов. Стенд содержит Г-образный кронштейн 8, вьтол- ненный поворотным вокруг вертикальной оси 9, проходящей через центр 10 рукоятки 4, и снабженный фиксатором 11. Кронштейн 8 снабжен противовесом 12, зажимными винтами 13 и дополнительным кронштейном 14 с блоком 15. Дополнительный кронштейн поворачивается на шарнире 16. Стенд содержит трос 20, измерительное устройство 26 и подвижной элемент 27. Наличие противовеса 12 позволяет уравнове«сить кронштейны 8, 14 и груз и разгрузить ось 9. 2 з.п. ф-лы, 5 ил. с J со со 00
Ю
Фаг. 5
Составитель В.Натахин
™ : 5:™1„ « корректор м.шжо
Заказ 4212/32Типя 77ftZI
12/32Тираж 776Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открьггий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, гГужгородГулТ
Проектная, 4
| , Келлер Э.А | |||
| Влияние вибраций на организм человека и проблемы виб- розапщты | |||
| - Тезисы доклада Ш Всесоюзного симпозиума | |||
| М., 1977, с | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Стенд для испытаний рам бензиномоторных пил | 1975 |
|
SU537281A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
