1
Изобретение относится к пневматическим логическим системам управления -циклическими технологическими процессами на объектах, оснащенных многопозиционными исполнительными механизмами, и может быть применено в робототехнике, при автоматизации процессов в химической, нефтеперерабатывающей и других отраслях про- мьшшенности.
Цель изобретения - расширение функциональных возможностей системы управления.
На фиг. 1 представлена блок- схема системы; на фиг. 2 - схемы отдельных блоков.
Объект управления оснащен многопзиционными исполнительны -и механизмами (не показаны). Такие исполнительные механизмы могут быть выполнены в виде поршневых исполнительны механизмов двухстороннего действия., которые перемещаются вперед или назад при подаче сигнала 1 в соответствующую полость цилиндра. Если оба управляюищх сигнала равны О, исполнительный механизм не
перемещается. Шток«каждого исполнительного механизма может занимать несколько заданных позиций, на которых устанавливаются датчики 1 положений (конечные выключатели), выходные сигналы которых сигнализи- -руют достижение каждой заданной позиции, путем формирования выходных сигналов 1.
Система включает блок 2 логических условий, последовательно соединенные блок 3 операций, блок 4 распределения и блок 5 дистанционного управления, переключатель 6 задания режима управления и переключатель 7 включения сигнализации
Блок 2 логических условий состоит, из ячеек 8 контроля, число которых равно количеству исполнительных механизмов, управляемых системой. Каждая ячейка 8 содержит коммутатор 9, многовходовый элемент ИЛИ 10, первое 11, второе 12, третье 13 и четвертое 14 реле, сигнализатор 15,
Выход каждого реле 14 соединен с управляющей камерой реле .14 следующей ячейки 8 контроля, а выход реле 14 последней ячейки 8 подключен к командному входу блока 3 операций. Управляющие камеры реле 11 всех ячеек 8 и
10
15
394982
реле 14 первой ячейки 8 сообщены с выходом переклгочателя 6.
Каждый коммутатор 9 (фиг. 2) выполнен в виде групп клапанов 16, Ь
число которых равно числу заданных
позиций (датчиков 1) для каждого исполнительного механизма. Общий выход клапанов подключается к рдному из сопл реле Т1 ячейки 8 контроля. Входы клапанов 16 соединены с Bbt- ходами датчиков 1 положения исполнительных механизмов.
Блок 3 операций может быть выполнен в виде пневматического шагового многопозиционного перектпочателя (фиг. 2). Переключатель содержит корпус 17 с выходами 18 и золотник 19 с радиальным каналом 20. Питание к золотнику подается цо каналу 21. Пошаговое вращение золотника обеспечивается подачей импульсных сигналов от реле 14 к приводу 22.
При вращении золотника канал 21 питания поочередно подключается к выходам 18, число которых равно количеству операций в соответствии с циклограммой работы системы управления. На каждой операции задается определенное положение каждого исполнительного механизма. При зтом предполагается, что на каждой операции должно изменяться положение одного исполнительного механизма.
Программирование работы системы управления в соответствии с циклограммой выполняется в блоке 4 распределения.
20
25
30
35
Блок 4 распределения выполнен в виде двух групп 23 и 24 многовходо- вых элементов ИЛИ 25. Элементы группы 23 формируют сигналы, передаваемые по каналам 26 на управление клапанами 16 коммутаторов 9. Элементы
группы 24 формируют командные сигналы, передаваемые по каналам 27 к реле 28 и 29 ячеек 30 блока 5 дистанционного управления исполнительными механизмами. Входы ка кдого элемента
ИЛИ 25 соединяются с выходами 18 блока 3 операций.
Таким образом, количество элементов 25 группы 23 равно числу датчиков 1, а количество элементов 25
группы 24 равно удвоенному числу
исполнительных механизмов (для включения прямого и обратного хода каждого исполнительного механизма).
Программирование блока 4 распределения заключается в следующем. Каждый элемент 25 группы 23 соединяется с выходами 18 блока 3, соответствующими операциям, на которых данный исполнительный механизм должен занять положение, определяемые датчиком 1, подключенным к клапану 16, управляемому элементом 25.
Каждый элемент 25 группы 24 соединяется с выходами 18 блока 3 соответствующими операциями, на которых данный исполнительный механизм должен быть включен в соответствующем направлении (прямой или обратный ход).
Блок 5 дистанционного управления состоит из ячеек 30 управления по одной на один исполнительный механизм,, каждая из которых включает кнопки 31 и 32 дистанционного управления, пятое 28 и шестое 29 реле, двухвходовый элемент ИЛИ 33. Выходы реле 28 и 29 подключены к выходным каналам 34 и к входам элемента 33,
Система работает следующим образом.
Сначала система включается в реж дистанционного управления (наладочн режим), при котором выходной сигнал переключателя 6 равен О. В режиме дистанционного управления переключатель 7 включается, его выходной сигнал равен 1, выходы реле 28 и 29 Соединяются с кнопками 31 и 32, с помощью которых оператор имеет воможность включить, любой исполнительный механизм в требуемом направлени При нажатии кнопки 31 или 32 в одном из каналов 34 формируется сигнал 1 а также срабатывает элемент 33, выходной сигнал 1 которого переключает реле 12.
В этом режиме нормально закрытое сопло реле 12 соединено через реле с выходом элемента 10. В процессе движения исполнительного механизма срабатывают последовательно датчики 1 . В момент подачи сигнала 1 от сработавщего датчика 1 сигнал 1 от элемента 10 проходит через реле 11 и 12 в управляющую камеру реле 13, на выходе которого формируется сигнал О. Если сигналы 1 от датчиков 1 отсутствуют, на выход реле 13 формируется сигнал 1,Таким образом, оператор имеет возможность контролировать движение
5
0
5
0
5
0
5
0
5
включенного исполнительного механизма по срабатыванию сигнализаторов 15. При прохождении заданной позиции, что контролируется оператором непосредственно по положению исполнительного механизма и по сигнализатору 15, кнопка 31 (или 32) цолжна быть отключена.
Перед переводом системы в режим автоматического управления все исполнительные механизмы должны быть установлены в положения, соответствующие исходной (нулевой) операции .
Для перевода системы в режим автоматического управления переключатель 6 устанавливается в положение Авт., при котором его выходной сигнал равен 1.
Сигнал 1 от переключателя 6 переключает реле 28 и 29 каждой ячейки 30 управления в положения, в которых выходы этих реле соединены с каналами 27, ив ячейках 8 контроля переключает первое реле 11, через которое выход коммутатора 9 соединяется с нормально закрытым соплом второго реле 12,
Выходной сигнал 1 от переключателя 6 подается также в качестве питания в канал 21 блока 3 операций (связь не показана), который должен быть установлен предварительно в положение, при котором сигнал 1 через золотник 19 подается в кА- нал 18, соответствуюпщй первой операции. В этом положении выходной сигнал цепочки реле 14, реализующих схему 4, равен О.
Сигналы 1 формируются на выходе блока 4, соединенном с клапаном 16, к которому подключен датчик 1, соответствующий положению переключаемого исполнительного механизма на первой операции. На выходе элемен- тов 25 группы 24 в блоке 4 формируется сигнал 1, который по каналу 27 подается через реле 28 (29) к переключаемому на первой операции исполнительному механизму. После сра- батьшания соответствующего датчика 1, сигнал 1 через коммутатор 9, реле It и 2 и цепочку реле 14 подается к приводу 22 блока 3. В результате золотник 19 поворачивается на одну позицию и в канал 18, соответствующий второй операции, подается сиг-
нал t. Далее система работает аналогично.
В режиме автоматического управления сигнализаторы 15 могут быть отключены переключателем 7,
В тех случаях, когда технологическая операция должна проводиться в течение заданного времени,, в качестве исполнительного механизма испол зуется реле времени, выход которого подключается к соответствующему входу коммутатора 9, Система позволяет осуществить управление многопозиционными механизмами и устанав- ливать их в заданных точках.
Формула изобретения
Пневматическая система управления циклическим процессом, содержащая датчики положений исполнительных механизмов, переключатель задания режима управления, блок логических условий, включающий ячейки контроля по числу управляемых исполнительных механизмов, каждая из которых содержит сигнализатор, первое, второе, третье и четвертое реле, причем выхо четвертого реле каждой предьщущей ячейки контроля соединен с положительной камерой четвертого, реле последующей ячейки контроля, блок операций, вход которого связан с выходом четвертого реле последней ячейки контроля, а выход - с входами двух групп элементов ИЛИ блока распределения, и блок дистанционного управления , от.личающаяся тем, что, с целью расширения функциональных возможностей, система снабжена переключателем включения сигнализации, в каждой ячейке контроля дополнительно установлены коммутатор и многовходовый элемент ИЛИ, а блок дистанционного управления выполнен в виде ячеек управления,
g
0
5
0
5
0
5
каждая из которых включает пятое и шестое реле, первую и вторую ккопки дистанционного упранления и двух- входовый элемент ИЛИ, причем в каждой ячейке контроля информационные входы коммутатора соединены с датчиками положений исполнительного механизма и входами многовходового . элемента ИЛИ, сообщенного своим выходом с нормально открытым соплом первого реле, нормально закрытое сопло которого соединено с информационным выходом коммутатора, плюсовая камера с Переключателем задания режима управления, а выход -.с нормально закрытым соплом второго реле, плюсовая камера которого подключена к выходу двухвходового элемента ИЛИ соответствующей ячейки управления, нормально открытое сопло - к каналу питания, а его выход - к плюсовой камере третьего реле и нормально закрытому соплу четвертого реле, нормально открытое сопло третьего реле соединено с переключателем включения сигнализации, выход третьего реле сообщен с сигнализатором, управляющие входы коммутатора соединены с выходами соответствующих элементов ИЛИ первой группы блока распределения, в первой ячейке контроля плюсовая; камера четвертого реле соединена с переключателем задания режима управления, а в каждой ячейке управления проточные камеры нормально закрытых сопл пятого и шестого реле подключены выходами второй группы . элементов ИЛИ блока распределения, проточные камеры нормально открытых сопл пятого и шестого реле соединены с первой и второй кнопками дистанционного управления, плюсовые камеры - с выходом переключателя задания режимов управления, а выходы - с входами двухвходового элемента ИЛИ и с вььходными каналами системы.
От реле 1
К рем 29 иг.2
Редактор В. Петраш
Составитель О. Гудкова
Техред М.Ходанич Корректор М. Демчнк
Заказ 4218/36Тираж 863 . Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4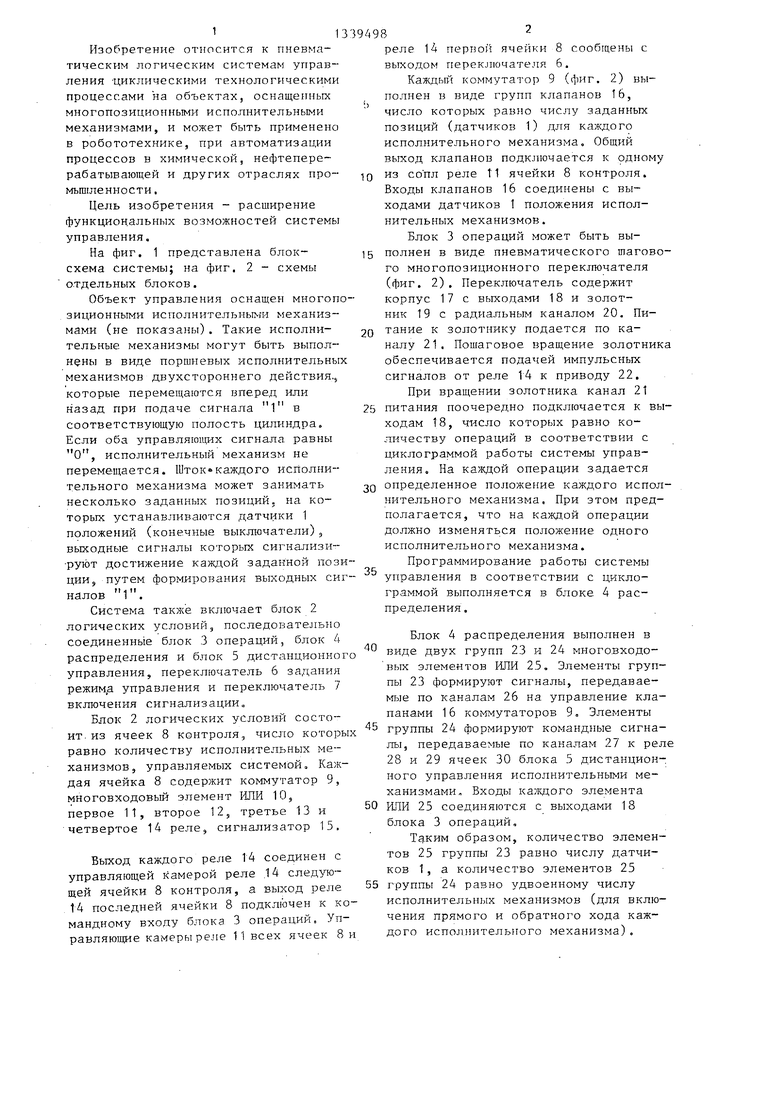
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическая логическая система управления | 1971 |
|
SU881717A1 |
| УСТРОЙСТВО ДЛЯ МНОГОКАНАЛЬНОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2406157C2 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| УСТРОЙСТВО ДЛЯ МНОГОКАНАЛЬНОЙ СИГНАЛИЗАЦИИ | 2005 |
|
RU2297672C1 |
| Устройство для контроля пневматических приборов | 1977 |
|
SU645024A1 |
| Автоматизированная линия поверки и наладки шахтных сигнализаторов газа | 1989 |
|
SU1661459A1 |
| Устройство для контроля пневматических приборов | 1980 |
|
SU934226A1 |
| Система автоматического управления работой дозатора | 1990 |
|
SU1747309A1 |
| Автоматизированная линия поверки и наладки шахтных сигнализаторов газа | 1990 |
|
SU1723348A1 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU1001006A1 |
Изобретение относится к пневматическим логическим системам управления циклическими технологическими процессами с многопозиционными механизмами. Целью изобретения является расширение функциональных возможностей системы, которая содержит подключенный к датчикам 1 положений исполнительных многопозиционных механизмов (ИМ) блок логических условий 2, состоящий из ячеек 8 контроля по числу исполнительных механизмов. Ячейки предназначены для контроля правильности движения ИМ. При заданном движении ИМ блок операций 3 выдает сигналы на блок 4 распределения, который на каждой операции задает определенное положение одного из ИМ. Сигналы с блока 4 поступают на блок 5 дистанционного управления, с которого ИМ управляются дистанционно или автоматически. Схемное выполнение ячеек 8 контроля позволяет управлять многопозиционными ИМ. 2 ил. g (Л со со со 4 ;о 00
| ПНЕВМАТИЧЕСКАЯ ЛОГИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 0 |
|
SU302696A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пневматическая логическая система управления | 1971 |
|
SU881717A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
