Изобретение предназначено для управления объектами с циклическим процессом производства, характеризующимся дискретными технологическими операциями.
Известна аналогичная система управления, которая содержит блоки датчиков контроля, датчиков времени, разрешения операций, формирования команд, дистанционного управления, блокировок, преобразователей и информации.
Блоки датчиков контроля и датчиков времени соединены с блоками разрешения операций, информации и блокировок, блок разрешения операций соединен с блоком формирования команд, связанным с блоком информации и через блоки дистанционного управления, блокировок и преобразователей - со входами исполнительных механизмов.
Эта система имеет ограниченные функциональные возможности, так как она осуществляет управление процессом только по жесткой заранее заданной программе, с определенными количеством технологических операций, исполнительных механизмов и определенным порядком переключения исполнительных механизмов. Кроме того, система содержит блок датчиков времени, состоящий из отдельных датчиков с часовыми механизмами п сложный по конструкции.
В предлагаемой системе с целью расширения функциональных возможностей блок формирования команд вынолнен в виде блока операций, соединенного с блоком распределения команд, причем блок операций содержит последовательно соединенные многопознционные пневмомеханические шаговые устройства с выходами, подключенными ко входам элементов «И, число которых равно числу технологических операций, а блок распределения команд содержит элементы «ИЛИ ( «ИЛИп) число которых равно числу выходных каналов устройства. Кроме того, с целью унификации используемой аппаратуры блок датчиков времени содержит генератор тактовых кмпульсов и последовательно соединенные мпогопозиционные пневмомеханические шаговые устройства, первое из которых соединено с генератором тактовых импульсов, выходы
каждого шагового устройства подключены через многопозицпонные одновыходные переключатели к элементам «И, причем число переключателей, соединенных с одним шаговым устройством, и число элементов «И равно числу временных уставок.
На фиг. 1 представлена структурная схема системы управления, на фиг. 2 - структурная схема блока операций, а на фиг. 3 - структурная схема блока датчиков времени.
Блоки 1 датчиков контроля и 2 - датчиков времени (см. фиг. 1) соединеиы с блоками разрешения операций (3), информации (4) и блокировок (5). Блок разрешения онераций соединен с блоком 6 формирования команд, состоящим из блока 7 онераций, связанного с блоками информации, датчиков времени, и через блоки раснределения команд (5), блокировок (5), дистанционного управления (9) н преобразователен (10) со входами исполнительных механизмов.
Система выполняет автоматическое унравление иснолиительными механизмами в соответствии с заданной циклической программой с дискретными технологическими операциями; дистанциониое управление исполнительными механизмами; аварийную защиту и блокировку; технологическую и аварийную сигнализацию.
Команда на переход к каждой последующей операции формируется в блоке разрешения онераций. Выходиой сигнал этого блока появляется только ири иаличии на его входах всех разрещающих сигналов, соответствующих этой операции, которые подаются от блоков датчиков контроля, содержащих датчики технологических параметров и датчики положения исполнительных механизмов , и блока датчиков времени. Блок 3 разрешения операций .состоит из схем «И (,,), количество которых равно числу оиераций цикла. Выходные сигналы схем «И объединены оператором «ИЛИ. Выходной сигнал блока разрешения операций (от оператора «ИЛИ) поступает к блоку операций, количество выходов у которого равно числу технологических операций цикла. При поступлении к блоку 7 онераций каждой команды от блока разрешения операций ноявляется сигнал на следующем выходе блока 7. Этот сигнал служит командой на проведение следующей технологической операции, т. е. на переключение определенных иснолнительных механизмов. Программа переключения в соответствии с командами от блока операций заложена в блоке распределения команд, реализованного иа элементах «ИЛИ, число которых равно количеству исполнительных механизмов. Командные сигналы к каждому исполнительному механизму проходят через блоки дистанционного управления, блокировок и иреобразователей. Первый из них производит дистанционное управление исполнительным механизмом, причем в качестве органов дистанционного управления используются элементы специальной конструкции - следящие переключатели (ЯС)-ПСп), применение которых позволяет осуществлять переход с автоматического управления на дистанциониое одним переключателем «Автоматика-дистанционно без проведения подготовительных операций.
Блок блокировок осуществляет технологические блокировки в процессе проведения операций. К нему подаются сигналы от блока датчиков контроля. Блок преобразователей
содержит преобразователи П,-Я„, которые иреобразовывают пиевматические дискретные сигналы с давлением 1,4 кгс/см в сигналы (пиевматические, электрические и другие), необходимые для управления исполнительными механизмами. Блок информации представляет информацию о положении всех исполиительиых механизмов, об операции, протекаю цей в данный момент, а также формирует
аварийные сигналы о иарушении режимов работы оборудования.
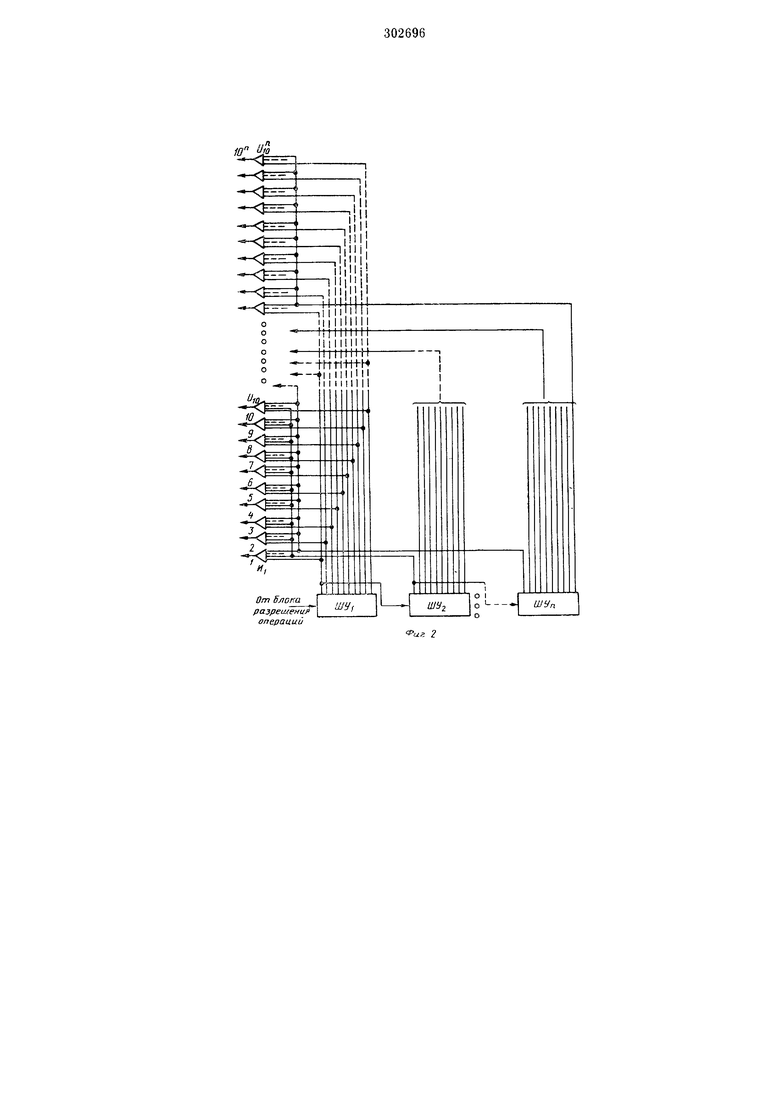
Иа фиг. 2 представлена етруктурная схема блока 7 оиераций. Блок содержит п шаговых устройств , каждое из которых
имеет один вход и т выходов, а также т элементов «И ()-«И,„). Вход каждого иоследуюн1;его шагового устройства соединен с первым выходом предыдущего. Практически чаще всего используются десятипозициониые шаговые устройства (). В схеме иа фиг. 2 также использованы десятипозиционные шаговые устройства. Первый выход ШУ соединен со входами элементов «И, , и т. д. второй - со входами , ,
ц т. д., третий - со входами , , «1-1 2з и т. д., четвертый - со входами «РЬ.|, .j, и т. д., пятый - со входами , , и т. д., шестой - со входами , , п т. д., седьмой - со входами , , н т. д., восьмой - СО
входами , , и т. д., девятый - со входами , , , и т. д. и, наконец, десятый - со входами , , и т. д. Первый выход ШУ2 соединен со входами элементов , второй - со входами элементов и т. д. Первый выход Я/УЗ еоединеи со входами элементов 100, второй - со входами элементов «И 101-«И 2оо и т. д. Первый выход ZZ/Уз соединен со входами элементов , второй - со входами элементов И2. и т. д. Выходы элемеитов «И являются выходами блока операций. В иеходиом положении каждого щагового устройства на
его первом выходе имеется сигнал «I (давление нитания), а иа всех остальных выходах - сигнал «О (атмосфера). При подаче на вход щагового устройства пневматических импульсов сигнал «1 последовательно устанавливается на всех его выходах. В начале цикла все шаговые устройства находятся в исходном положении, т. е. сигнал «1 имеется на их первых выходах и, следовательно, иа выходе элемента . Выход является
комапдой, по которой все исполнительные механизмы устанавливаются в положения, соответствующие началу цикла. При подаче к ШУ1 от блока разрешения операций сигнала, разрещающего переход к следующей оиерации, сигнал «1 появляется на втором выходе Я/У и выходе элемента и т. д. Когда сигнал «1 с последнего выхода какого-либо шагового устройства переходит снова на его первый выход, на входе последующего Я/У
дующее положение. Очевидно, что нри нодаче команд от блока разрешения онераций на вход Я/У, сигнал «1 последовательно появляется на всех выходах элементов «И, т. е. на всех выходах блока операций. После выполнения последней операции, предусмотренной программой, включается схема возврата (не показана), которая устанавливает все шаговые устройства в исходное положение. Изменяя количество шаговых устройств и :г)лементов «И, можно получить блок операций с любым количеством выходов.
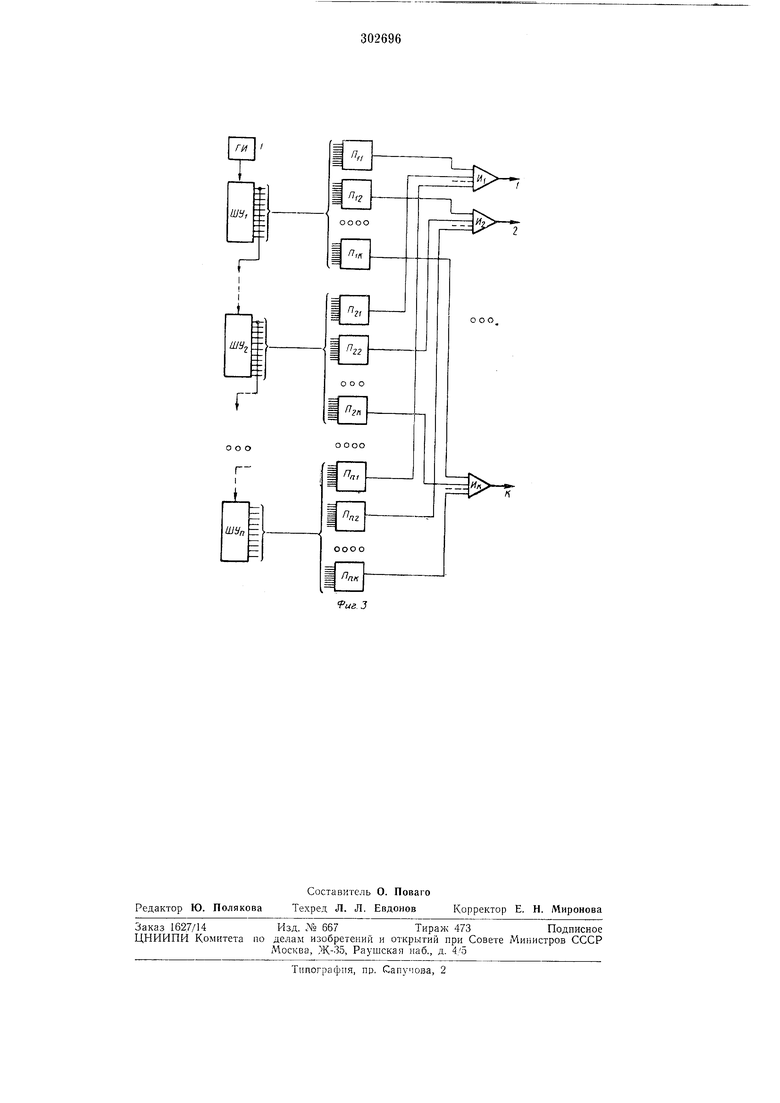
На фиг. 3 представлена структурная схема блока датчиков времени. Блок содержит последовательно соединенные шаговые устройства Я/У -ШУп- Вход Я/У соединен с выходом генератора тактовых импульсов ГИ, который выдает пневматические импульсы с заданной частотой, например один импульс в минуту. Выходы каждого шагового устройства соединены со входами группы многопозиционных переключателей , и т. д., каждый из которых имеет т входов, один выход и ручку с т фиксированными положениями (чаше всего ). При установке ручки переключателя в одпо из положений соответствующий вход его соединяется с выходом. Выходы первых переключателей всех групп соединены со входами элемента , выходы вторых переключателей всех групп - со входами элемента и т. д. Выходы элементов «И) являются выходами блока.
Задание каждой временной уставки производятся установкой в определенные положения ручек всех переключателей, связанных с соответствующим элементом «И. Отсчет заданного времени начинается по сигналу от блока операций, который включает генератор тактовых импульсов, и поступает на вход соответствуюн1,его элемента «И (на фиг. 3 эти входы элементов «И не показаны). При этом все шаговые устройства находятся в исходном положении. После отсчета заданного временного интервала включается схема возврата, которая устанавливает все шаговые устройства в исходное положепие (на фиг. 3 схема возврата не показана).
Количество шаговых устройств зависит от длительности отсчитываемого временного интервала и от необходимой точности его отсчета (чем выше требуется точность отсчета, тем
больше должна быть частота импульсов генератора и, следовательно, большее количество импульсов требуется отсчитать). Количество переключателей, соединенных с каждым шаговым устройством и количество элементов
«И равно общему числу временных уставок.
Предмет изобретения
15
1. Пневматическая логическая система управления, содержащая блоки датчиков контроля и датчиков времени, соединенные последовательно с блоками разрешения операций, формирования команд, блокировок, дистанционного управления и преобразователей, и блок информации, соединенный с блоками датчиков, отличающаяся тем, что, с целью расширения функциональных возможностей, в
ней в качестве блока формирования команд использован блок операций, содерл ащий последовательно соединенные многоиозиционные щаговые устройства, подключенные ко входам элементов «И, число которых соответствует числу технологических онераций, и соединенный с ним блок распределения команд, содержащий элементы «ПЛП, число которых соответствует числу выходных каналов устройства.
2. Система по п. 1, отличающаяся тем, что, с нелью унификации аппаратуры и упрощения конструкции, в ней блок датчиков времени содержит генератор тактовых импульсов, и последовательно соединенные многопозиционные шаговые устройства, первое из которых соединено с генерато юм тактовых импульсов, а выходы каждого ншгового устройства подключены через многопозициоппые одновыход1 ые переключател к элементам «П, причем
число переключателей, соединенных с одним шаговым устройством, и число элементоп «П соответствует числу временных уставок.
f I M ( IГйлоЗо ТЭГ
t6
От Влока
ШУ,
разрешение операций
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯП-1АЯ•••:-У1^~r^'-f"^,r' | 1971 |
|
SU307399A1 |
| Пневматическая логическая система управления | 1971 |
|
SU881717A1 |
| УСТРОЙСТВО для ПРОГРАММНОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ КРАСИЛЬНОГО | 1967 |
|
SU190460A1 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| Устройство для управления манипулятором | 1979 |
|
SU938261A1 |
| ЦЕНТРАЛЬНЫЙ ПРОЦЕССОР МУЛЬТИПРОГРАММНОЙ МУЛЬТИПРОЦЕССОРНОЙ ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ | 1971 |
|
SU309363A1 |
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО | 1969 |
|
SU254355A1 |
| Пневматическая логическая система управления | 1984 |
|
SU1285437A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 1967 |
|
SU190406A1 |