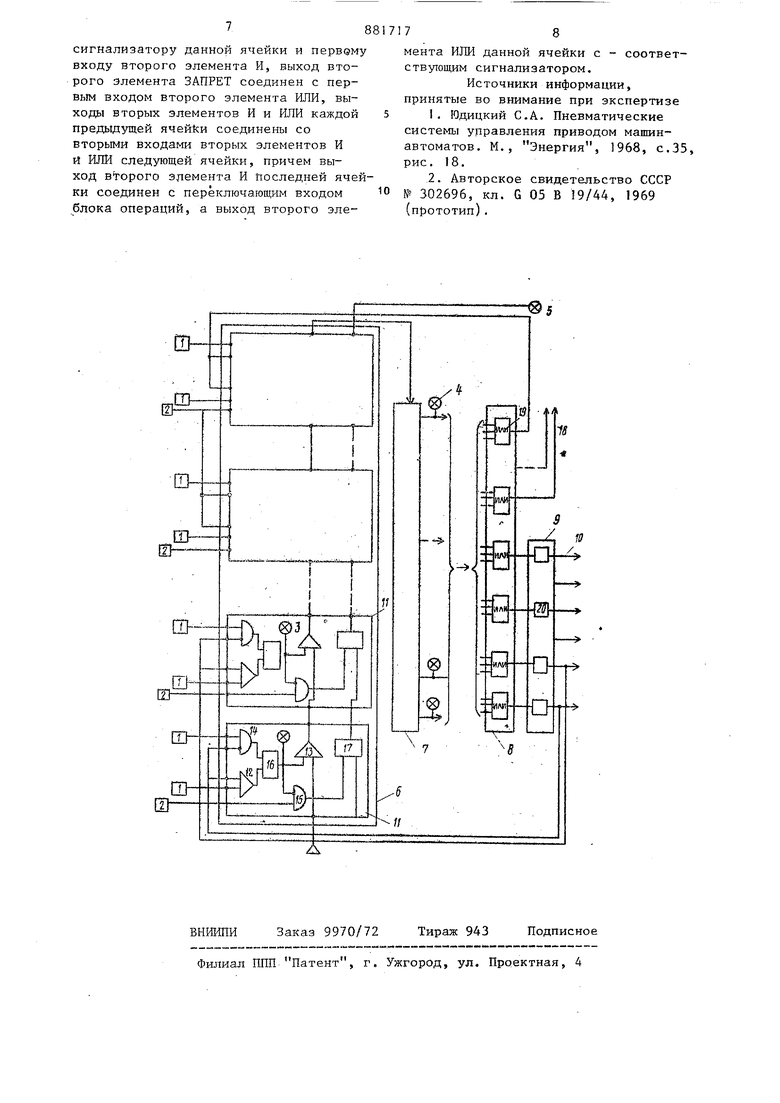
Изобретение относится к гидравлическим вычислительным машинам и предназначено для управления объектами с циклическим процессом производства, характеризующимся дискретными технологическими операциями. Известна система управления, которая содержит блоки управления логичес ких условий, триггеров l. В этой системе формирование выходных сигналов осуществляется с помощью триггеров, управляемых импульсными сигналами. Наиболее близкой к предлагаемому является пневматическая логическая система управления, содержащая блоки датчиков контроля и датчиков времени соединенные последовательно с блоками разрешения операций, формирования командj блокировок, дистанционного управления и преобразователей, и блок информации, соединенный с блоками датчиков. В системе в качестве блока формирования команд использован блок операций, содержащий последовательно соединенные многопозиционные шаговые устройства, подключенные ко входам элементов И, число которых соответствует числу технологических .операций и соединенный с ним блок распре деления команд, содержащий элементы ИЛИ, число которых соответствует числу выходных каналов устройства X2l. В известной системе блок разрешения операций (логических условий) со стоит из параллельно соединенных многовходовых элементов И, количество которых и алгоритм коммутаци определяется программой процесса и которые должны быть изменены вследствие коррекции программы. Кроме того, в указанной системе отсутствует возможность осуществления контроля переходного режима исполнительных механизмов и формирования аварийного сигнала при превышении заданной длительности переходного режима. Все это су38жает область применения известной темы. Цель изобретения - расширение об-: ласти применения системы. Поставленная цель достигается за счет того, что в пневматической логической системе управления, содержащей каналы датчиков контроля, .датчиков времени, сигнализаторы, блок логических условий и последовательно соединенные блок операций, выходы которого подключены к соответствующим сигнализаторам блок распределения, блок дистанционного управления, выходы которого подключены к выходным каналам системы, блок логических условий состоит из ячеек по числу команд управления и контроля, каждая из которых содержит два элемента И, два элемента ЗАПРЕТ и два элемента ИЛИ, причем один вход первого элемента И, инверсный вход первого элемента ЗАПРЕТ соединены с соответствующими выходами : блоков распределения и дистанционного управления, вторые входы данных элементов подключены к соответствующим каналам датчиков контроля, а выходы - к входам первого элемента ИЛИ, прямой вход второго элемента ЗАПРЕТ соединен с соответствующим каналом датчика времени, инверсный вход второго элемента ЗАПРЕТ - с выходом первого элемента ИЛИ, подключенным к сиг нализатору данной ячейки и первому входу второго элемента И, выход второго элемента ЗАПРЕТ соединен с первым входом Второго элемента ИЛИ, ,выхо ды вторых элементов И и ИЛИ каждой предыдущей ячейки соединены со вторыми входами вторых элементов И и ИЛИ следующей ячейки, причем выход второго элемента И последней ячейки соединен с переключающим входом блока опе-п радий, а выход второго элемента ИЛИ данной ячейки - с соответствующим сиг нализатором. На чертеже представлена схема системы. Пневматическая логическая система управления, содержащая каналы датчиков контроля 1, датчиков времени 2, сигнализаторы 3-5, блок логических условий 6, последовательно соединенные блоки операций 7, распределения 8 и дистанционного управления 9, выходы которого подключены к выходным каналам системы 10. Блок логических условий 6 вьшолнен на ячейках 11, каждая из которых 74 содержит два элемента И 12 и 13, два элемента ЗАПРЕТ 14 и 15 и два элемента ИЛИ I6 и 17. Число ячеек в блоке равно числу команд управления и контроля . Первый вход первого элемента И 12 и инверсный вход первого элемента ЗАПРЕТ 14 соединены с соответствующим Выходом блока распределения 8 или блока дистанционного управления, вторые входы этих элементов подключены к каналам датчиков контроля 1, а выходы ко входам первого элемента ИЛИ 16, прямой вход второго элемента ЗАПРЕТ 15 соединен с каналом соответствующего датчика времени 2, инверсный вход с выходом первого элемента ИЛИ 16, подключенньм к соответствующему сигнализатору 3 и одному из входов второго элемента И 13, выход второго элемента ЗАПРЕТ 15 соединен с одним входом второго элемента ИЛИ I7, выходы вторых элементов И 13 и ИЛИ 17 соединены соответственно со вторыми входами тех же элементов последующей ячейки, выходы элементов 13 и 17 последней ячейки соединены с блоком операции 7 и с соответствующим сигнализатором 5. Блок операции 7 может быть выполнен на базе пневматического шагового многопозиционного переключателя, выходы которого являются командами на проведение технологических операций, а.соединенные с ними сигнализаторы 4указателями протекающей операции. Блок распределения 8 содержит элементы ИЛИ 19, число которых равно числу командных сигналов. Командные сигналы к каждому исполнительному механизму частично проходят через блок дистанционного управления 9, который производит дистандионное управление каждБгм исполнительным механизмом,причем в качестве органов дистанционного управления используются элементы специальной конструкции - следящие переключатели 20, применение которых позволяет осуществлять переход с автоматического управления на дистанционное одним переключателем Автоматика - дистанционно без проведения подготовительных операций. Выходы остальных элементов ИЛИ 19 поступают либо на управление какими-либо внутренними устройствами системы,например включают датчики времени, либо слзгасат только для контроля проте5кания технологического процесса и поступают только на ячейки 1 1 . Система управления работает следующим образом. Система выполняет автоматическое управление исполнительными механизма ми в соответствии с заданной циклической программой с дискретными техн логическими операциями, дистанционно управление исполнительными механизмами, аварийную защиту и блокировку, технологическую и аварийную сигнализацию. Команда на переход к каждой после дуйщей операции формируется в блоке 6. Выходной сигнал этого блока появляется только при наличиии на его входах всех разрещающих сигналов, со ответствующих этой операции, которые подаются с каналов I датчиков технол гических параметров и датчиков положения исполнительных механизмов и ка налов датчиков времени 2. На вход каждой ячейки 11 к первом входу элемента И 12 и инверсному вхо ду элемента ЗАПРЕТ 14 поступает сигнал управления или контроля с каналов 10 блока 9 или с каналов 18 бло ка 8. Например, если появление сигна ла с канала 10 или 18 является коман дои на открытие исполнительного механизма, а снятие сигнала с канала 10 или 18 - на его закрытие, то на вход ячейки 11 поступает сигнал от конечного сигнализатора закрытого положения исполнительного механизма. На прямой вход элемента 15 поступает сигнал с канала датчика времени, задающего максимально допустимое время выполнения команды. Команда на выполнение данной технологической операции поступает из блока операций 7. и распределяется в блоке распределения 8 на выходы системы, на которые она поступает или непосредственно от блока распределения 8 или через блок дистанционного управления 9. Каждый выходной сигнал с канала 10 поступает на соответствующую ячейку 11 блока логических ус ловий 6, на элементы 12 и 14. На выходе блока 8 сигнал 1 появляется в том случае, когда команда с канала 1 выполнена, т.е. приходит сигнал 1 от датчика контроля на вход элемента 12, когда сигнал с канала 10 равен 1, или на вход элемента 14, когда сигнал равен 0. Если команда по сигналу не выполняется, то на выходе 76 элемента 16 устанавливается сигнал О, что указывается сигнализатором 3. Если команда выполняется дольше заданного максимального времени, то на вход ячейки 11 поступает сигнал с канала 2, который проходит через элемент 15 на вход элемента 17. При выполнении всех команд по сигналам ка-, налов 10 на выходах элементов 16 всех ячеек 11 появляется снгнгш I, поступающий на вход элемента 13 пер- вой ячейки I1, проходит через элементы I3 всех ячеек 11 на выход блока 6 и производит переключение блока one-, раций 7 на следующий шаг. Если же любая команда по сигналу в канале 10 выполняется дольше заданного максимального времени, то сигнал 1 проходит от i-той ячейки 11 через элементы I7 всех последующих ячеек и производит включение сигнализации о задержке выполнения команд. Технико-экономический эффект заключается в простоте и унифицированном подходе к построению системы. Формула изобретения Пневматическая логическая система управления, содержащая каналы датчиков контроля, датчиков времени, сигнализаторы, блок логических условий и последовательно соединенные блок операций, выходы которого подключены к соответствующим сигнализаторам, блок распределения и блок дистангщонного управления, выходы которого подключены к выходным каналам системы, отличающаяся тем, что, с целью расширения области применения, блок логических условий состоит из ячеек по числу команд управления и контроля, каждая из которых содержит два элемента И, два элемента ЗАПРЕТ и два элемента ИЛИ, причем один вход первого элемента И и инверсный вход первого элемента ЗАПРЕТ соединены с соответствуюш 1ми выходами блоков распределения и дистанционного управления, вторые входы данных элементов подключены к соответствующим каналам датчиков контроля, а выходы - к входам первого элемента ИЛИ, прямой вход второго элемента ЗАПРЕТ соединен с соответствующим каналом датчика времени, инверсный вход второго элемента ЗАПРЕТ - с выходом первого элемента ИЛИ, подключенным к
788
сигнализатору данной ячейки и первому входу второго элемента И, выход второго элемента ЗАПРЕТ соединен с первым входом второго элемента ИЛИ, выходы вторых элементов И и ИЛИ каждой предьщущей ячeйkи соединены со вторыми входами вторых элементов И и ИЛИ следующей ячейки, причем выход вгорого элемента И Последней ячейки соединен с переключающим входом блока операций, а выход второго эле78
мента ИЛИ данной ячейки с - соответствующим сигнализатором.
Источники информации, принятые во внимание при экспертизе
1,Юдицкий С.А. Пневматические системы управления приводом машинавтоматов. М., Энергия, 1968, с.35 рис. 18.
2.Авторское свидетельство СССР № 302696, кл. G 05 В 19/44, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическая система управления циклическими процессами | 1985 |
|
SU1339498A1 |
| Пневматическое устройство цикловогоупРАВлЕНия | 1978 |
|
SU798735A1 |
| Система управления грузовыми операциями на танкере | 1978 |
|
SU753709A2 |
| Система управления грузовыми операциями на танкере | 1974 |
|
SU596498A1 |
| Устройство для многоточечной сигнализации | 1989 |
|
SU1621067A1 |
| Устройство для многоточечной сигнализации | 1990 |
|
SU1795496A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| Устройство для управления судовым агрегатом | 1975 |
|
SU596995A1 |
| Устройство управления насосным агрегатом | 1990 |
|
SU1707256A1 |
| Система управления грузовыми операциями на танкере | 1979 |
|
SU919933A2 |
