1
Изобретение относится к электротехнике и может быть использовано для механизмов, где необходимо регулирование скорости в широком диапазоне и предъявляются высокие требования к ограничению ускорения и рывка (например, лифты, шахтные подъемные машины и т.п.).
Цель изобретения - повышение на- дежности и долговечности путем устранения колебаний момента при переходе в режим фазового управления (ФУ).
На фиг.1 изображена структурная
схема устройства, реализующего способ 15 лирования амплитуды режима непосредуправления комбинированным частотно- параметрическим асинхронным электроприводом; на фиг.2 - механические характеристики электропривода, поясняющие, сущность предлагаемого способа. Устройство содержит асинхронный двигатель 1, непосредственный преобразователь 2 частоты с системой 3 им- пульсно-фазового управления, датчик
4 частоты вращения, командоаппарат 5, 25 тора 17 скорости. Выход коммутатора коммутаторы 6 и 7, элементы 8 и 9 7 соединен с вторым входом регулятора
Управляющие
сравнения, задатчик 10 интенсивности разгона и торможения , каналы регулирования частоты 11 и амплитуды 12 вы17 скорости режима ФУ,
входы коммутаторов 6 и 7 соединены
вместе, объединены с первьм входом
35
40
ходного напряжения в режиме непосред-ЗО схемы 15 блокировки каналов системы ственного преобразователя частоты, задатчик 13 управляющих напряжений низкой частоты (ЗНЧ), блок 14 выбора режимов, схему 15 блокировки каналов системы импульсно-фазового управления, блоки 16 формирования сигнала, пропорционального квадратному корню из абсолютного скольжения, и регулятор 17 частоты вращения.
Асинхронный двигатель 1 питается непосредственно от тиристорного преобразователя 2 частоты с системой 3 импульсно-фазового управления, входы многоканального блока сравнения которой через трехканальный коммутатор 6 подключаются либо к выходам ЗНЧ 13,, либо к выходу регулятора 17 частоты врал;ения. Командоаппарат 5 соединен с третьим входом ЗНЧ 13, выходы за- датчика 10 интенсивности и вторым входом схемы 15 блокировки каналов системы импульсно-фазового управления. Задатчик 10 интенсивности разгона и торможения первым выходом подключен к первому входу элемента 8 сравнения, а вторым выходом - к первому входу блока 14 выбора режимов. Сигнал с датчика 4 скорости подается на второй вход блока 14 выбора режиимпулъсно-фазового управления и соединены с выходом блока 14 выбора режи мов. Выход блока 15 соединен с входо логической части схемы системы импульсно-фазового управления.
Кроме того, на фиг.2 обозначены: 18 - естественная механическая харак теристика двигателя; 19 - механическая характеристика двигателя в режим непосредственного преобразователя частоты на частоте перехода в режим ФУ; 20,, 21, 22 - механические характеристики двигателя в режиме ФУ; Мр J - момент двигателя на естест- g венной характеристике при частоте вращения, равной 0,5 номинальной.
Предлагаемый способ осуществляется следующим образом.
К асинхронному двигателю 1 от не- gQ посредственного преобразователя 2 частоты подводится напряжение с частотой, изменяющейся от О до 30 Гд, и амплитудой, определенной в соответ ствии с законом управления для режим
.-с- НПЧ. При этом происходит разгон дви- 55
гателя до частоты вращения, равной
половин:е номинальной. Дальнейший раз гон двигателя до номинальной,частоты вращения осуществляется при изменени
IQ98632
МОЕ И на объединенные вторые входы элементов 8 и 9 сравнения. Выход элемента 8 сравнения подключен к объединенным входам канЕшов 11 регулирования частоты и регз лятора 17 частоты вращения.
Первый вход эл ;мента 9 сравнения объединен с первым входом канала 12 регулирования амплитуды режима непосредственного преобразования частоты (и с первым входом ЗНЧ 13) и соединен с выходом канала 11 регулирования частоты. Второй вход канала 12 регу0
ственного преобразователя частоты объединен с входом блока 16 извлечения корня и подклкшен к вькоду элемента 9 сравнения,, Выход блока 16 извлечения корня подключен к первому входу коммутатора 7. Второй вход коммутатора 7 объединен с объединенными вторыми входами трехканального коммутатора 6 и соединен с выходом регуляУправляющие
17 скорости режима ФУ,
входы коммутаторов 6 и 7 соединены
вместе, объединены с первьм входом
схемы 15 блокировки каналов системы
импулъсно-фазового управления и соединены с выходом блока 14 выбора режимов. Выход блока 15 соединен с входом логической части схемы системы импульсно-фазового управления.
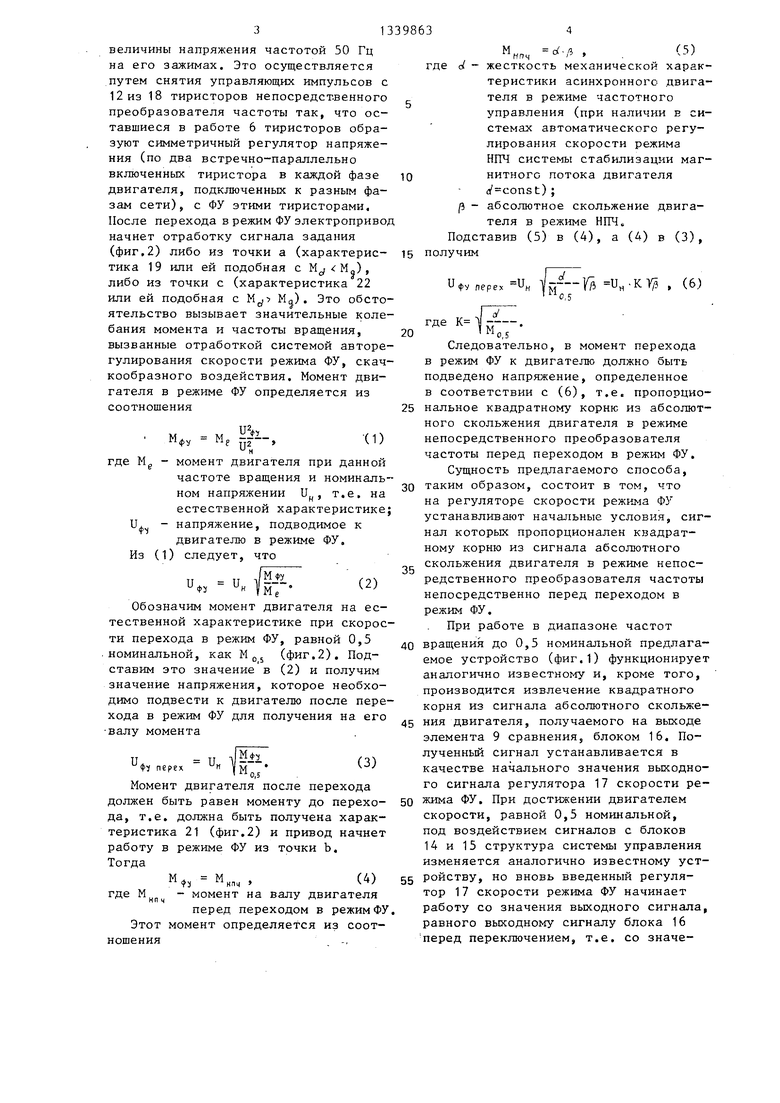
Кроме того, на фиг.2 обозначены: 18 - естественная механическая характеристика двигателя; 19 - механическая характеристика двигателя в режиме непосредственного преобразователя частоты на частоте перехода в режим ФУ; 20,, 21, 22 - механические характеристики двигателя в режиме ФУ; Мр J - момент двигателя на естест- венной характеристике при частоте вращения, равной 0,5 номинальной.
Предлагаемый способ осуществляется следующим образом.
К асинхронному двигателю 1 от не- посредственного преобразователя 2 частоты подводится напряжение с частотой, изменяющейся от О до 30 Гд, и амплитудой, определенной в соответствии с законом управления для режима
НПЧ. При этом происходит разгон дви-
гателя до частоты вращения, равной
половин:е номинальной. Дальнейший разгон двигателя до номинальной,частоты вращения осуществляется при изменении
величины напряжения частотой 50 Гц на его зажимах. Это осуществляется путем снятия управляющих импульсов с 12 из 18 тиристоров непосредственного преобразователя частоты так, что оставшиеся в работе 6 тиристоров образуют симметричный регулятор напряжения (по два встречно-параллельно включенных тиристора в каждой фазе двигателя, подключенных к разным фазам сети), с ФУ этими тиристорами. После перехода в режим ФУ электропривод начнет отработку сигнала задания (фиг.2) либо из точки а (характеристика 19 или ей подобная с М : Mj) , либо из точки с (характеристика 22 или ей подобная с М Ц) Это обстоятельство вызывает значительные колебания момента и частоты вращения, вызванные отработкой системой авторегулирования скорости режима ФУ, скачкообразного воздействия. Момент двигателя в режиме ФУ определяется из соотношения
М
ФУ
-М
-Mf уГ-,
де Mg - момент двигателя при данно частоте вращения и номинальном напряжении U, т.е. на естественной характеристике; напряжение, подводимое к двигателю в режиме ФУ. Из (1) следует, что
МФу
и
ч
Ф н Ум,
(2)
Обозначим момент двигателя на естественной характеристике при скорости перехода в режим ФУ, равной 0,5
, номинальной, как М (фиг.2). Подставим это значение в (2) и получим значение напряжения, которое необходимо подвести к двигателю после перехода в режим ФУ для получения на его
валу момента
и
1 перех
и„
Момент двигателя после перехода
45 ния двигателя, получаемого на выход элемента 9 сравнения, блоком 16. По лученный сигнал устанавливается в качестве начального значения выходн го сигнала регулятора 17 скорости р
должен быть равен моменту до перехо- 50 ФУ. При достижении двигателем
скорости, равной 0,5 номинальной, под воздействием сигналов с блоков 14 и 15 структура системы управлени изменяется аналогично известному ус 55 ройству, но вновь введенный регулятор 17 скорости режима ФУ начинает работу со значения выходного сигнал равного выходному сигналу блока 16 перед переключением, т.е. со значеда, т.е. должна быть получена характеристика 21 (фиг.2) и привод начнет работу в режиме ФУ из точки Ь. Тогда
М, М„„, ,(4)
где М - момент на валу двигателя
перед переходом в режим ФУ Этот момент определяется из соотношения
М
НПЦ
d:-ft
(5)
где of - жесткость механической характеристики асинхронного двигателя в режиме частотного управления (при наличии в системах автоматического регулирования скорости режима НПЧ системы стабилизации магнитного потока двигателя (3/ const) ;
ft - абсолютное скольжение двигателя в режиме НПЧ Подставив (5) в (4), а (4) в (3),
получим
и tv перех н
kf-n UH-KI , (6)
0,5
20
30
Следовательно, в момент перехода в режим ФУ к двигателю должно быть подведено напряжение, определенное в соответствии с (6), т.е. пропорцио25 нальное квадратному корню из абсолютного скольжения двигателя в режиме непосредственного преобразователя частоты перед переходом в режим ФУ.
Сущность предлагаемого способа, таким образом, состоит в том, что на регуляторе скорости режима ФЗ устанавливают начальные условия, сигнал которых пропорционален квадратному корню из сигнала абсолютного скольжения двигателя в непосредственного преобразователя частоты непосредственно перед переходом в режим ФУ.
При работе в диапазоне частот
40 вращения до 0,5 номинальной предлагаемое устройство (фиг.1) функционирует аналогично известному и, кроме того, производится извлечение квадратного корня из сигнала абсолютного скольже45 ния двигателя, получаемого на выходе элемента 9 сравнения, блоком 16. Полученный сигнал устанавливается в качестве начального значения выходного сигнала регулятора 17 скорости ре35
ФУ. При достижении двигателем
скорости, равной 0,5 номинальной, под воздействием сигналов с блоков 14 и 15 структура системы управления изменяется аналогично известному уст- ройству, но вновь введенный регулятор 17 скорости режима ФУ начинает работу со значения выходного сигнала, равного выходному сигналу блока 16 перед переключением, т.е. со значе513
i/ия, пропорционального квадратному корню из величины абсолютного скольжения двигателя в режиме непосредственного преобразователя частоты непосредственно перед переходом. При этом в первый момент времени после перехо- .да к двигателю подводится напряжение (частотой 50 Гц) такой величины, которая обеспечивает вращающий момент, -в точности равный моменту на валу перед переходом. В остальном работа предлагаемого устройства также аналогична известному.
При реализации предлагаемого способа сохраняется непрерывность момента двигателя при переходе в режим ФУ, что обеспечивает безударный переходный процесс регулирования частоты вращения. При этом значительно повышаются долговечность и надежность работы электропривода.
Формула изобретения
Способ управления комбинированным частотно-параметрическим асинхронным электроприводом, выполненным на базе
Л)
9иг.г
асинхронного двигателя, подключенного к непосредственному преобразователю частоты, при котором, регулируя частоту и величину напряжения на выходе непосредственного преобразователя частоты, разгоняют асинхронный двигатель до частоты вращения, равной половине номинальной, после чего, осуществляя фазовое регулирование тиристоров непосредственного преобразователя частоты при постоянной частоте напряжения, на его выходе, равной частоте сети, разгоняют асинхронный
5 двигатель до номинальной частоты вращения, отличающийся тем, что, с целью повышения надежности и долговечности путем устранения колебаний момента при переходе в режим
0 фазового управления, измеряют абсолютное скольжение асинхронного двигателя и при переходе в режим фазового регулирования устанавливают начальное значение величины напряжения на выходе непосредственного преобразователя частоты, пропорциональным корню квадратному из измеренной величины абсолютного скольжения асинхронного двигателя.
8
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления комбинированным частотно-параметрическим асинхронным электроприводом и устройство для его осуществления | 1987 |
|
SU1541751A1 |
| Электропривод с комбинированным частотно-параметрическим управлением | 1989 |
|
SU1686690A1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА | 1992 |
|
RU2081504C1 |
| Электропривод переменного тока | 1987 |
|
SU1436260A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2383863C1 |
| СПОСОБ СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385531C1 |
| Асинхронный вентильный каскад | 1985 |
|
SU1365339A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
| Частотно-регулируемый электропривод грузоподъемного механизма | 1985 |
|
SU1365333A1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ПЕРЕМЕННОГО ТОКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА С МИКРОПРОЦЕССОРНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2013 |
|
RU2554911C2 |
Изобретение относится к электротехнике и может быть использовано в лифтах, шахтных подъемных машинах. Целью изобретения является повьш1ение надежности и долговечности электропривода. Способ управления комбинированным частотно-параметрическим электроприводом осуществляют следующим образом. Изменяя частоту и величину напряжения на выходе циклоконвертора 2, разгоняют асинхронный двигатель 1. По достижении частотой вращения асинхронного двигателя 1 величины, равной половине номинальной,.поддерживают частоту напряжения на выходе циклоконвертора 2 постоянной, равной частоте сети, и осуществляют фазовое регулирование циклоконвертора, 2 ил. о (Л iS i 2 ФФ СО со со 00 Ср СО
Составитель В.Тарасов Редактор Л о Гратилло Техред Л. Сердюкова Корректор А.Обручар
Заказ 4243/54 659Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1980 |
|
SU944044A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод с комбинированным управлением частотой вращения | 1983 |
|
SU1223323A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
