Изобретение относится к средствам автоматического управления наматывающими устройствами.
Цель изобретения - расширение технологических возможностей устройства.
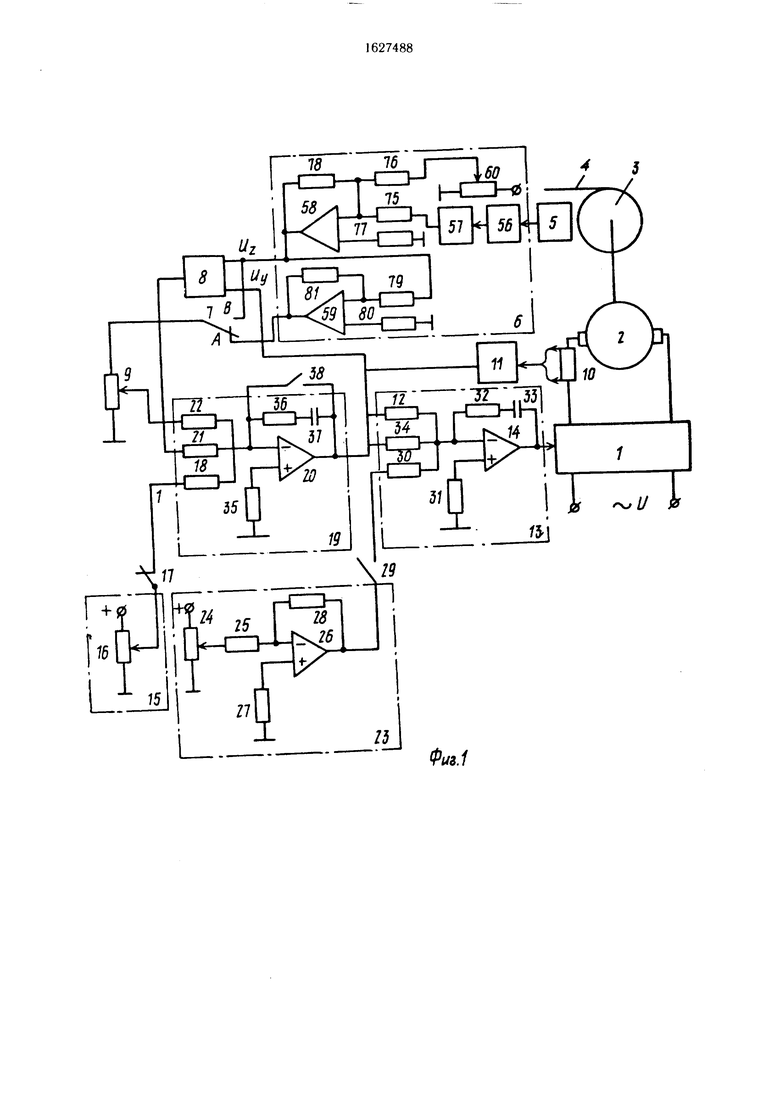
На фиг. 1 изображена функциональная схема предлагаемого устройства; на фш 2 - схема тиристорного преобразователя; на фиг. 3 - схема датчика числа слоев паковки; на фиг. 4 - схема блока измерения радиуса паковки; на фиг. 5 - схема блока измерения натяжения; на фиг. 6 - схема блока измерения момента привода.
Устройство содержит блок управления приводом паковки, выполненный в виде тиристорного преобразователя 1, на выходные зажимы которого включен электродвигатель 2 постоянного тока с независимым возбуждением. Электродвигатель 2 приводит во вращение паковку 3, на которую наматывается длинномерный материал (проволока или лента) 4. Датчик 5 числа слоев паковки выходом соединен с входом блока 6 измерения радиуса паковки. Выход блока 6 соединен с клеммой переключателя 7 и первым входом блока 8 измерения натяжения длинномерного материала. Кроме того, выход блока 6 связан с другой клеммой переключателя 7, общая точка которого соединена с задатчиком натяжения, выполненного в виде потенциометра 9. В цепи якоря электродвигателя 2 включен шунт И), выход которого подан на вход блока 11 измерения момента привода, выходом подключенною к входу блока 8 измерения натяжения и через резистор 12 на инвертирующий вход cn.in- теля регулятора 13 момента, построенного на операционном усилителе 14.
В блоке 15 задания натяжения потенциометр 16 подключен к источнику постоянного тока, а движок его через переключатель 17 и резистор 18 присоединен к инвертирующему входу регулятора 19 натяжения, построенного на операционном усилителе 20. Выход блока 8 измерения натяжения и движок потенциометра 9 подключены соответственно через резисторы 21 и 22 на входы регулятора 19 натяжения.
В блоке 23 задания момента привода потенциометр 24 подключен к источнику постоянного тока, а его движок через резистор 25 соединен с входом инвертора 26, неинвертирующий вход которого через резистор 27 соединен с общей точкой, а в цепи обратной связи инвертора 26 включен резистор 28. Выход инвертора 26, который является также выходом блока 23 задания момента привода, через переключатель 29 и
SS
(Л
05 Ю 1
400 00
рсмшлор 30 соединен с входом регулятора 13 момента привода, выход которого подан на вход тиристорного преобразователя 1 Неинвертирующий вход регулятора 13 момента через резистор 31 соединен с общей точкой, а в цепи обратной связи включены последовательно резистор 32 и конденсатор 33, поэтому регулятор 13 момента является пропорционально интегральным (ПИ-рег ля- тор) Выход регулятора 19 натяжения соединен через резистор 34 с инвертирующим входом ре.1ятора 13 момента привода, другой вход регулятора 19 через резистор 35 соединен с общей точкой, а в цепи обратной связи включены последовательно резистор 36 и конденсатор 37, поэтому регулятор 19 натяжения является пропорционально интегральным Параллельно пени обратной связи регулятора 14 натяжения имеется переключатель 38
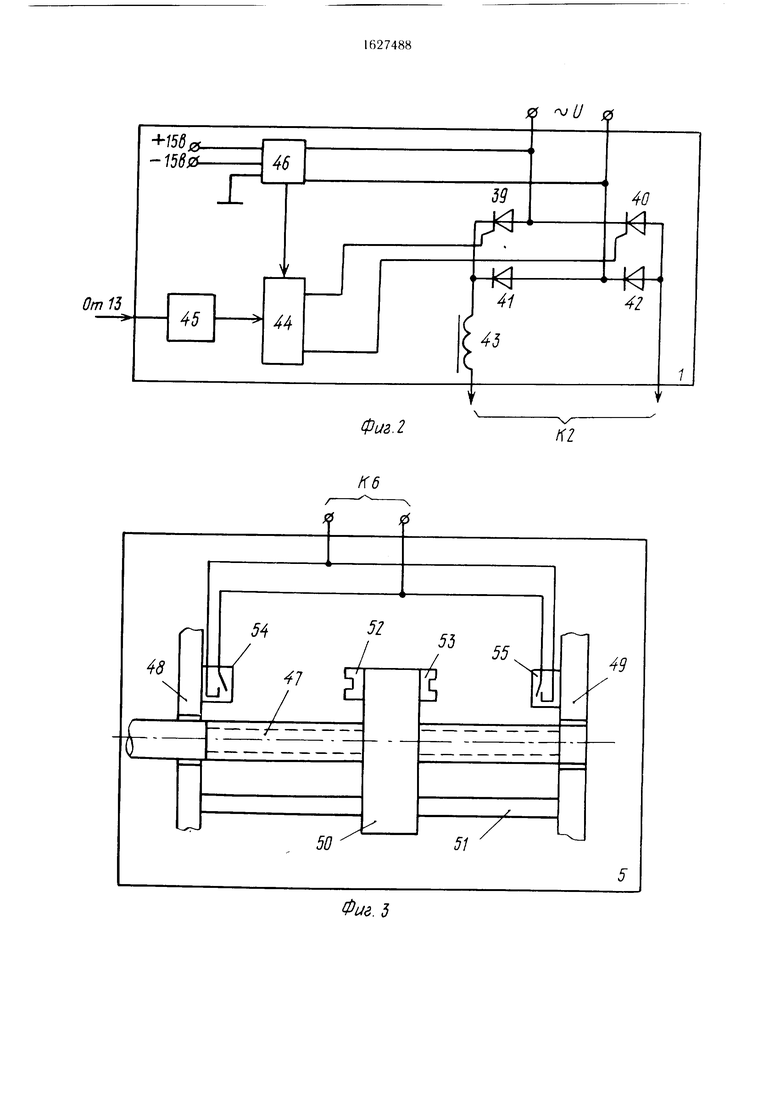
Тиристорный преобразователь 1 содержит тиристоры 39 и 40 и диоды 41 и 42, соединенные по ошофазной мостовой схеме Выпрямленное напряжение с тиристорного преобразователя 1 подается через сглаживающий дроссель 43 на электродвигатель 2 Управляющие электроды тиристоров 39 и 40 соединены с выходами системы 44 импульс- но-фа юного управления, вход которой подключен к выходу ре лятора 13 момента привода через coi ласующий эмиттерный повторитель 45
Датчик 5 числа слоев паковки имеет винт 47 е правой и левой нарезкой, вращается в опорах 48 и 49 посрситвом пе родами от отдельною электропривода или от электропривода намоючною устройства При вращении вины 17 каретка 50 переме щаегся по направляющей 51 и по винту 47 При помощи каретки 50 осу meci вляегся ук- ла тка длинномерною материала на паков к у 3 На карегке 50 с unx сторон с танов- лены постоянные магниты 52 и 53, а на опорах 48 и 49 уеган В1ены магнитоуправляе- мыо контакты 54 и 55
По окончании намотки очередного слоя каретка 50 занимает ото из крайних положений, при этом магнитами 52 и 53 замыкаются контакты 54 или 55
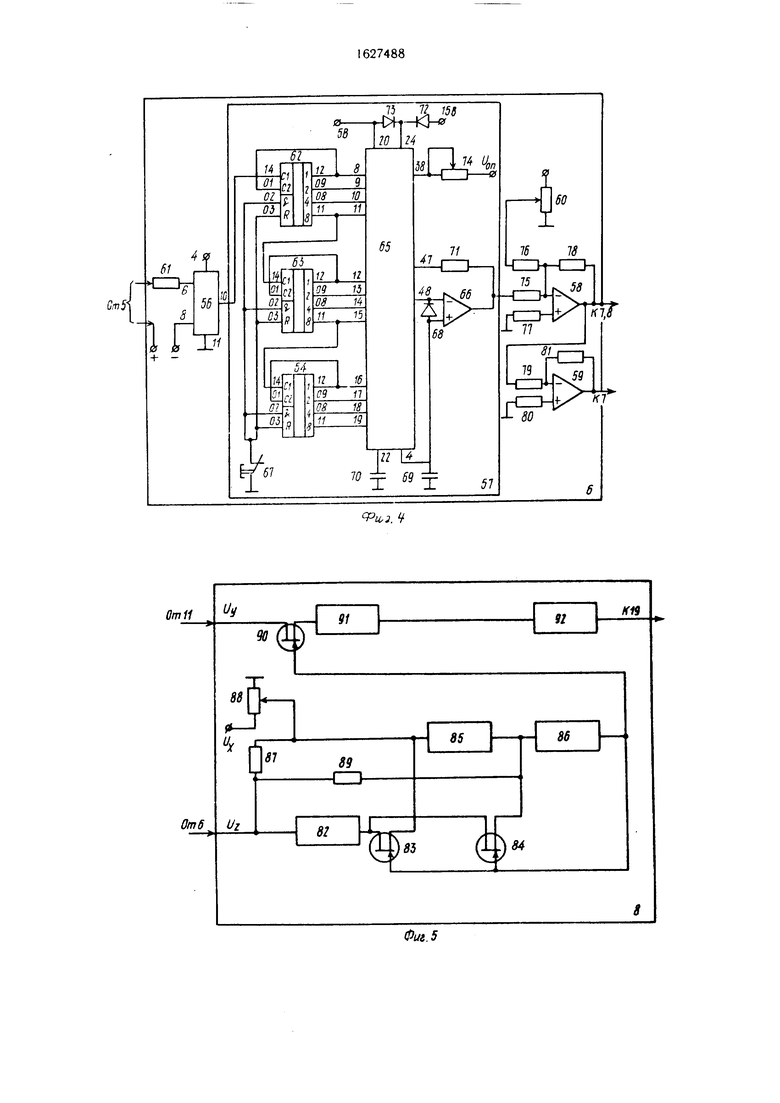
Блок 6 измерения радиуса паковки содержит оптоэлектронный коммутатор 56, счетчик 57 числа слоев намотки, суммирующий силитель 58, инвертор 59 и потенциометр 60 уччановки начального радиуса паковки (фиг 1 и фиг 4) Вход оптоэлек- тронною коммутатора 56 через резистор 61 и клеммы источника постоянного напряжения подктючен к выходу датчика 5 числа слоев паковки и является входом блока 6 и з- мерения радиуса паковки Выход оптоэлек- тронною коммутатора 56 (фиг 1 и фиг 4) подан на вход счетчика 57 числа слоев намотки, который содержит три микросхемы 62 - 64 цифроаналоговыйпреобразователь
0
(ЦАП) 65 и выходной усилитель 66 (фиг. 4). Вход 14 микросхемы 62 является входом счетчика 57 числа слоев намотки. Входы 2 и 3 установки нуля микросхем 62-64 соедипены вместе и через размыкающую кнопку 67 подключены к общей точке (фиг 4) Выходы 12, 09, 08 и 11 микросхем 62-64 поданы на входы 8-19 ЦАП 65 Выход 48 ЦАП 65 соединен с инвертирующим входом выходного усилителя 66, к которому подключен
° также катод диода 68, анодом присоединенный к неинвертирующему входу усилителя 66 Неинвертирующий вход усилителя 66 (фиг 4) соединен также с выводом 4 ЦАП 65 и через конденсатор 69 соединен с
общей точкой, к которой через конденсатор 70 присоединен вывод 22 ЦАП 65. В цепи обратной связи усилителя 66 включен ре- зисюр 71. одним выводом соединенный с выходом 47 ЦАП 65, а другим - с выходом усилителя 66. Вывод 20 ЦАП 65 подключен к источнику постоянного тока +5В, вывод 24 через диод 72 подключен к источнику постоянною тока +15В, а между выводами 20 и 24 ЦАП 65 включен диод 73 в прямом направлении (фиг 4) Вывод 38 ЦАП 65
5 через регулируемый резистор 74 подключен к источнику опорного напряжения
Выход усилителя 66, являющийся выходом счетчика 57 числа слоев намотки, подключен через резистор 75 на инвертирующий вход суммирующего усилителя 58 (фиг 1 и фиг 4) Потенциометр 60 подключен к источнику постоянного тока, его движок через резистор 76 присоединен к инвертирующему входу суммирующего усилителя 58, неинвертирующий вход которого через резистор 71 соединен с общей точкой В цепи обратной связи усилителя 58 включен резистор 78
Выход суммирующего усилителя 58 через резистор 79 соединен с инвертором 59 Не- ичвертирующий вход инвертора 59 через резистор 80 соединен с общей точкой, а в цепи обратной связи инвертора 59 включен резистор 81 (фиг 1 и фиг 4)
Блок 8 измерения натяжения построен на множительно-делительной ячейке
0
Ь
0
Два входа ячейки (фиг 5) являются входами блока 8 измерения натяжения 8 (фиг 1 и фиг 5), а выход является выходом блока 8 измерения натяжения 8 (фиг 1 и фиг. 5). Блок 8 измерения натяжения (фиг. 5) содержит инвертор 82, вход которого соединен с первым выходом блока 6 измерения радиуса паковки (фиг 1 и фиг. 5), а выход че- ре.з электронные ключи 83 и 84 соединен соответственно с входами интегратора 85 и компаратора 86. На вход интегратора 85 подключены также через резистор 87 выход блока 6 измерения радиуса паковки и потенциометр 88 (фиг 5) Выход интегратора 85 через резистор 89 соединен с первым вычоюм блока 6 измерения радиуса паков
ки и непосредственно - с входом компаратора 86, выход которого соединен с входами электронных ключей 83, 84 и 90 (фиг 5) Усилитель 91 своим входом через ключ 90 соединен с выходом блока 11 измерения мо- мента (фиг. 1 и фиг 5). а выходом подключен к входу выходного усилителя 92 Выход усилителя 92 соединен с резистором 21 на входе регулятора 19 натяжения (фиг 1 и фиг. 5)
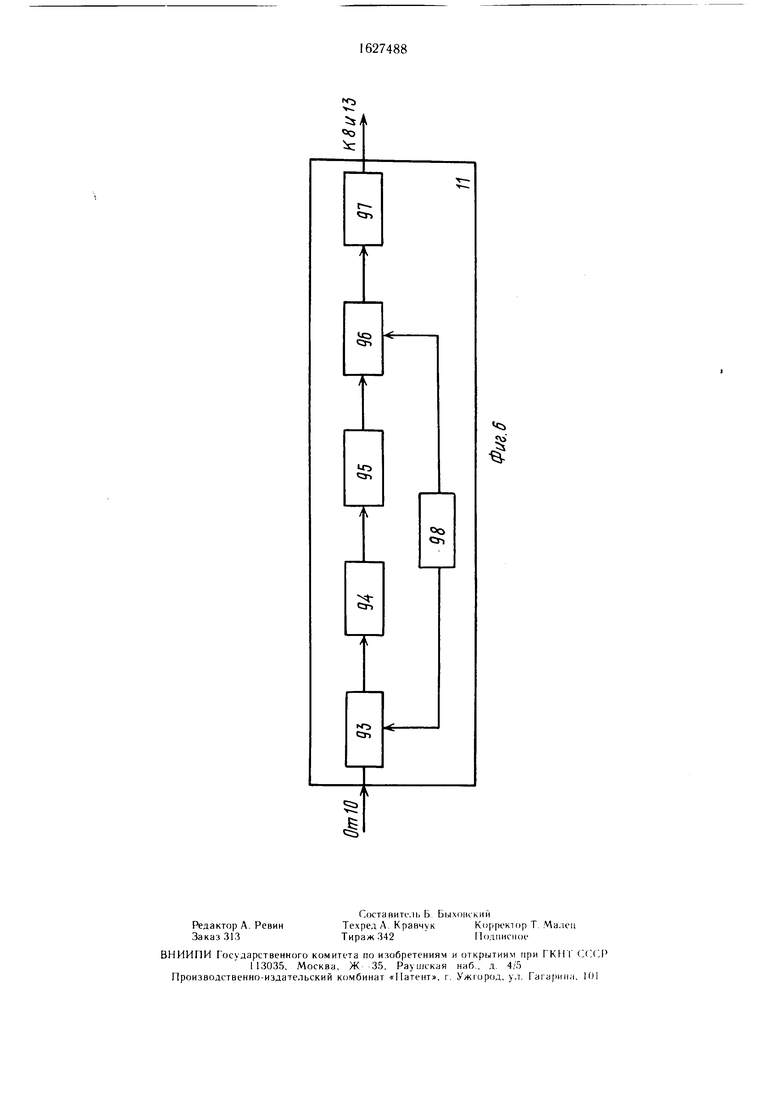
Блок 11 измерения момента привода по- строен на ячейке датчика тока, предназначенного для усиления напряжения, пропорционального току якоря электродвигателя 2, снимаемого с шунта 10.
Поскольку измерение момента электродвигателя осуществляется косвенно - посредством измерения тока якоря, то ячейка датчика тока выполняет функцию блока измерения момента. При этом вход ячейки датчика тока является и входом блока измерения момента, а выход - выходом блока измерения момента (фиг 1 и фиг 6)
Блок измерения момента привода содержит модулятор 93, вход которого соединен с шунтом 10, а выход присоединен к входу потенциального разделителя 94 (фиг 6), выход 94 которого присоединен к входу уси- лителя 95, выход которого соединен г входом демодулятора 96 Выход демодулятора 96 соединен с входом выходного усилителя 97, выход которого соединен с резистором 12 на инвертирующем входе тора 13 момента и со вторым входом блока 8 измерения натяжения (фиг 1 и фиг 6) Выход генератора 98 коммутирующего сигнала соединен со вторыми входами модулятора 93 и демодулятора 96 (фиг 6)
Устройство работает следующим образом.
При подаче переменного напряжения на тиристорный преобразователь 1 (фиг 1) начинается разгон электродвигателя 2 в соответствии с заданным натяжением и выбранным законом его регулирования
Радиус намотки измеряется датчиком 5 числа слоев паковки (фиг 1 и фиг 3) и бло ком 6 измерения радиуса паковки (фиг 1 и фиг. 4) Напряжение, пропорциональное радиусу паковки, с выхода блока 6 измерения радиуса паковки подается на вход блока 8 измерения натяжения На другой вход блока 8 подается напряжение, пропорциональное величине .момента электродвигателя, с выхода блока 11 измерения момента привода Напряжение, пропорциональное натяжению, с выхода 8 блока измерения натяжения подается через резистор 21 на вход регулятора 19 натяжения с полярностью, противоположной полярности напряжения задания, снимаемого с потенциометра 16 Поэтому ускорение электродвигателя 2 паковки 3 пропорционально отклонению действительного натяжения от заданного
Б
5
0
о
5
5
0
5
0
ь
Для получения /кг UK. i , о . KI мотки паковки устройство imuuihui ,i i водить намотку при постоянном ti 11 я/к пни. при величении натяжения и t,iniKn ioi и намотки и при уменьшении н.пч/м ния в зависимости от pa.uiwa H.IMOIKH
Выбор ТОЮ ИЛИ ИНОМ) UHH оба 11, М ц, и
закона регулирования натяжение опрг ie м ется в каждом случае конкрешыми и к1
ВИЯМИ
При намотке наковки L шктччным ia тяжением, независимым от :ы in(.a паковки в работе участвуют все бпоки м. i ршк i на, за исключением блока 23 задания момента привода При этом переключаю it 7 можег занимать любое положение, пере к и .ire ч. 17 замыкается, переключать ai 2ч и is pas мыкаются, движок потенции мет ра 8 (. ын.пз ливается в крайнее по.юженш . (.оешнжг н с общей точкой и имеет нулевой почни. : Поэтому сигнал обратном связи, пропорции нальный радиус намотки. пост пающии че рез резистор 22 на i реилятора И н.пя жения, равен нулю
Выбор необходимо о натяжения днтся соответстн ющеи установкой напряже ния задания потенциометром 1ь с, щка 1 задания натяжения коюрое чоыгня через замкнутый переключатель 17 и peiuiop I ,s на ре лятора 14 натяжения фт 1)
Сигнал oi ртытельнон обр.лмои (.вязи по натяжению поступает от блока h и ния натяжения с от рица те |ьчои понр ностью через резистор 21 на pei ,ч pa 19 натяжения (фш ) Формирован сигнала отринате.п ной обра г HI и изч-,1 п натяжению ое шеститяепя к лнмшг.. об ра зом
Блок 11 измерения момента iipunoi,. по строен на ячейке датчика юка |фш I r фи 6), ею .нои CHIH.II ii|ioiiopnnoH.i лен величине тока якорч -J.ICKIPO сзш aie ля 2 Электромагнитный i riiii m н постоянною тока опре а шеи я иин(.1ным выражением
М - СФ1Л.i 1 I
i де С констрч кгивныи ко ф шишм-1 IK стояннои величины.
Ф машигныи поточ
11 - ток якоря
При неизменной величин, тока шмГп/к дения магнитный поток iBinau leu ымаыии мого возбужтения неизменен, i e Ф const Поэтому согл.кно (1) момегп гатетя пропорциона leu гок якоря и ь случае выхотной (.шпал блока 11 прими ционален как Т(к якоря, гак и момеш двигателя Напряжение по южи те ibi on пи лярности с выхода б юка 11 пропорщ о нальное моментч электро шп are in 2 пода ется на i б юка 8 измерзни на Я/кмшя На другой вход блока 8 по йен я напря жение от рицате 1ьной полЯ|)но i и iipoiK pHiuH- нальное радиусх намотки паковки ныхо ia
Ом, имеет ie шип
В усилителе 20 входной ваегся и инвертируется
блока t измерении радиуса паковки (фт 1 и фш П В блоке 6 перед началом намогки очередной наковки потенциометром 60 устанавливается напряжение, пропорцио- н,1 тыюе начальному радиусу паковки 3 К это н напряжению в процессе намотки в усили- ie те добавляется напряжение, пропорциональное приращению радиуса намогки Поскольку блок 8 измерения натяжения по- tipoen на множитедьно-делитедьной ячейке то в нем происходит деление напряжения, пропорционального момешу электродвиг ате- ля 2, на напряжение, пропорциональное радиусу паковки 3 В результате на выходе блока 8 получается напряжение, пропор , иональное натяжению длинномерною ма- териала 4, наматываемою на паковку 3 При положительной полярности напряжении на входах х и у и отрицательной на входе / блока имения (фш Г), что имеет место в данном случае, напряжение на выходе блока 8 будет иметь отрицательн у ю полярное т т
В соответствии с этим на входе регуля- юра 19 натяжения вхо той сшнал определяемся алгебраической суммой
I - t j, 0 ,(2)
т 1.0 I ij напряжение задания натяжения,
U1 напряжение, пропорциональное натяжению
таено (2) входное напряжение ll.v положительную полярность относи- обитай точки, гак как сигнал I нч ус,тли Выходной сит нал
регулятора 1) натяжения имеет отрицательную полярность, является управляющим и мере розгктор 34 подается на инвертирую щии вхо т регулятора 13 момента привода На эгог же вхо т через резистор 12 по тается сит нал положи те1 плюй полярности с выхода блока II и зм рения момента привода (фит 1)
Выходной сит ч т регулятора 13 момента привода имеет положительную полярность, является управляющим и подается на вход iирис торного преобразователя 1 Изменение выходною управляющею сигнала регулятора 13 момента привода ,изнывает соогвет ствуютцне И менения тла ретулирования ти- риеторовпреобразоватедя 1 (фит 1 и фиг 2) Вследствие этого и (меняются напряжение, по .водимое к электродвигателю 2, ею вращающий момент и скорость вращения па ковки 3 так. что натяжение ос аетея не пшенным и равным за танному
В тайном случае ретутятор 13 момента привои является подчиненным по от ношению к регулятору И) на-яжения
При намотке с у во шчением натяжения в зависимости от радиса намотки закон рег лирования натяжения или скорость возрастания натяжения в зависимости от радиуса чамогки устанавливается положением А пе0
5 0
5
0
5
о 45 50
реключателя 7 и движком потенциометра 9 (фит. 1) При этом функциональная схема устройства остается такой же, как и при намотке с постоянным натяжением, но подключается еще один сигнал на входе регулятора 19 Напряжение положительной полярности, снимаемое с потенциометра 9 ч пропорциональное радиусу намотки, подается чере з резистор 22 на вход регулятора 19 натяжения Процесс намотки заключается в том, что натяжение от начальною, задаваемого потенциометром 16 (фиг 1), увеличивается в функции радиуса намотки по закону, задаваемому потенциометром 9 в большей и ти меньшой степени В этом случае напряжение на входе ретулятора 19 натяж ния определяется ал тебраической суммой сиг налов
U«i UJ -1
где Uj, напряжение задания начального
натяжения первою с.оя паковки, снимаемое с потенциометра 16, I 1 напряжение, пропорциональное натяжению, подается от блока 8 ттзме рения натяжения,
L i напряжение, пропорциональное ра паковки, подается со второю выхода блока ( измерения радихса паковки
Из (3) видно, что с ростом радиуса на мотки растет, соответственно, и напряже ние U При этом сумма напряжений (I . -f- + 11) увеличивается Это эквивалентно у во дичению напряжения задания натяжения в функции радиуса намогки вследствие чет о увеличивается натяжение длинномерного магериала 4
При намотке с уменьшением натяжения в ф нкции радиуса намотки тнмможны два варианта построения ф нкциопальнои схемы vc тройства
При первом варианте сохраняется функциональная схема предыдущею способа на мотки с возрастанием натяжения в функции радиуса, но переключатель 7 устанавливается в положение В В этом случае напри жение отрицательной полярности поступает с первою выхода б,тока 6 измерения ра диуса паковки через переключатель 7 на потенциометр 9 С движка потенциометра 9 напряжение, пропорциональное радиусу па ковки, поступает через резистор 22 на вход ретулягора 19 натяжения На входе рогуля гора 19 чатяжения вхо тдюй сигнал опреде ляется алгебраической суммой сит налов
li I i(4)
чю с росюм радиуса на
fer1 Из (4| видна,
мотки у меныттается соот ветст вен но су мма напряжении (11| -1Ь). что равносильно мень шению напряжения задания в функции ращу са намотки, встслсгние чего уменьшается натяжение длинномерною материала При необходимости, например, в случае какой-либо неисправности в , можно
легко перейти ко второму варианту построения функциональной схемы при намотке с уменьшением натяжения в функции радиу са намотки При этом переключатель 17 размыкается, а переключатели 29 и 38 замыкаются (фиг 1) Схема существенно упрощается, в работе остаются только блок 11 измерения момента привода, регулятор 13 момента и блок 23 задания момента (фиг 1) Теперь устройство работает как ПИ-регуля- тор момента, поддерживая неизменной величину электромагнитного момента электродвигателя 2, т е М const Напряжение задания момента снимается с движка потенциометра 24 и подается на инвертор 26 С выхода инвертора 26 напряжение задания отрицательной полярности через замкнутый переключатель 29 подается через резистор 30 на вход регулятора 13 момента (фиг 1) С выхода блока 11 измерения момента привода напряжение положительной полярности и пропорциональное моменту электродвигателя 2 подается через резистор 12 на вход регулятора 13 момента, где алгебраически суммируется с напряжением задания момента, т е
и.. -и..-ки,
(5)
где UM - напряжение, пропорциональное моменту электродвигателя 2
Выходное напряжение положительной по лярности регулятора 13 момента привода подается на вход преобразователя 1
При намотке с ростом радиуса паковки натяжение уменьшается обратно пропорцио нально радиусу от некоторого начального значения в соответствии с выражением
F-Ј
где R - радиус намотки шпули
Тиристорный преобразователь 1 (фиг 1 и фиг 2) работает следующим образом Напряжение управления положительной полярности с выхода регулятора 13 момента привода поступает через эмиттерный повторитель 45 (фиг 2) на вход системы 44 им- пульсно-фазового управления (СИФУ)
СИФУ 44 работает на принципе заряда конденсатора до напряжения пробоя порогового элемента В момент сравнения напряжения выдается импульс управления на управляющие электроды тиристоров 39 и 40 (фиг 2) Изменяя постоянную времени заряда конденсатрра, можно регулировать фазу управляющих импульсов тиристоров 39 и 40 и, следовательно, величину выпрямлен ного напряжения, подаваемого на электродвигатель 2 (фиг 1) Из схемы, изображенной на фиг 2, видно, что тиристорный преобразователь 1 собран по однофазной мостовой схеме на тиристорах 39 и 40 и диодах 41 и 42 Для сглаживания пульсаций выпрямленного напряжения применяется сглаживающий дроссель 43 (фиг 2)
10
20
25
40
45
с,0
Датчик 5 4tK.id с шов паковки i фш I и фиг 3) работает следмошим обраюм Винт 47 вращается в опорах 48 и 41 к i,i i чика материала 4 посредством перс ими ш отдельного электропривода или от -меыро привода намоточного устройства При вра щении винта 47 каретка 50 перемс-цин н я по винту 47 и по направляющей 51 (фиг 3), при этом одновременно каре кой 50 перемещается материал 4 вюль па ковки 3 (фиг 1), в результате чего и производится укладка с заданным шагом На каретке 50 с двух сторон установлены по стоянные магниты 52 и 53, а на неподвижных опорах 48 и 49 установлены магнитоуправ ., ляемые контакты 54 и 55 (фиг 3)
По окончании намотки очередною слоя паковки 3 каретка занимает одно из крайних положений Под действием магнитного поля постоянных магнитов 52 или 53 замыкаются соответственно магнитоуправляемые контак ты 54 или 55 При этом от источника по стоянного напряжения на вход блока номере ния радиуса паковки 6 подается . напряжения положительной полярности
При уходе каретки 50 из крайнею по ложения магнитоуправляемые контакты 54 и 55 размыкаются и импульс напряжения на входе блока 6 снимается
Коммутатор 56 (фиг 4) воспринимае импульсы напряжения от датчика числа ело ев паковки 5 (фиг 1- фиг 4) При амыка нни магнитоуправляемых контактов 54 или 55 в датчике 5 на выводах коммутатора 56 появляется импульс напряжения Для oi pa ничения тока во входной цепи KOMMVT.I тора 56, т е последовательно с ним, включен резистор 61
Счетчик 57 числа слоев намотки (фш 4) является двенадцатиразрядным с разре шающей способностью, равной
у Т - 1.(7)
где п 12 - число разрядов счетчика
Исходя из (7), счетчик 57 позволяет счн тать до 4095 импульсов или слоев намотки Вывод 14 микросхемы 62 является «ходом счетчика 57 (фиг 4) Выводы 2 и 3 микро схем 62-64 соединены вместе и чере ра мыкающую кнопку 67 подключены к общей точке При нажатии на кнопк 67 цепь pa мыкается, что равносильно подаче на выво ды 2 и 3 микросхем 62-64 сигнала высо кого уровня Это и обеспечивает станов ку нуля счетчика 57
Схема счетчика 57 осуществляет также преобразование и усиление информации, по ступающей в двоичном коде от непосред ственпо счетчика на микросхемах 62 Ы в аналоговую соответствующего ровня (фиг 4) Выводы 08, 09, II и 12 микро схем 62-64 подключены к чвенадцатн цифровым входным выводам 8 19 ЦАП 65, как показано на фиг 4 ЦАП 65 рассчитан на работч от IBV x источников питания 5В и 15В На фиг 4 приведена схема по i
30
35
55
к/мочения ЦАП 65 к источникам питания, выходного суммирующего усилителя 66 и резисторов 71 и 74 для регулирования коэффициента преобразования ЦАП 65. Резистор 74 подключен к источнику опорного напряжения и выводу 38 ЦАП 65. Установкой движка резистора 74 при соответствующей величине опорного напряжения и сопротивлении резистора 71 получают необходимый шаг квантования, т. е. приращения выходного напряжения при изменении входного кода на единицу младшего разряда, и соответственно, максимальное значение выходного напряжения.
Выход счетчика 57 числа слоев намотки в аналоговой форме представляется определенным уровнем напряжения положительной полярности, пропорциональным числу слоев намотки на паковку 3. Это напряжение поступает через резистор 75 на инвертирующий вход суммирующего усилителя 58. На что г же вход усилителя 58 посп пает через резистор 76 напряжение положительной полярности с потенциометра 60. Движком потенциометра 60 устанавливается напряжение, соответствующее начальному значению радиуса паковки 3. В результате суммирования указанных напряжении на выходе усилителя 58 получается напряжение отрицательной полярности, а на выходе инвертора 59 - напряжение такой же величины, но положительной полярности (фиг. 4), т. е. на выходах усилителей 58 и 59 имеем
U,u +Ц.(8)
где U. - напряжение, соответствующее начальному значению радиуса наковки;
Г, напряжение, соответствующее порядковому номеру сдоя намотки. При этом в начале намотки напряжение U, 0 и на выходе усилителей 58 и 59 будет ирису гствовать только напряжение П. кн. В процессе намогки с ростом числа слоев растет и напря/ь ние (;,, поступающее с выхода счетчика 57 числа слоев. В соответствии с этим растет сумма напряжений (8), чем и контролируется рост радиуса намотки паковки 3. Выходное напряжение блока 6 измерения радиуса па овки подается на вход блока 8 измерения натяжения и через переключатель 7 и потенниомеф 9 на вход регулятора 19 натяжения
Блок 8 измерения натяжения позволяет прошводшь вычисление результата операции умножения и деления входных аналоговых сигналов, заданных в виде напряжений Г,, Ге и I .-. в соответствии с выражением
К1Ли„/И-(91
Принцип перемножения входных сигна лов U г и 11„ основан на выделении средней сое 1ав.;яющей переменного напряжения прямоугольной формы, которое формируется по амплитуде напряжением I „, а по длительности напряжением I , Деление осу щест0
5
5
5
:п:
в.тяется в результате изменения коэффициента усиления в канале формирования по длительности под действием сигнала U,. Стабилизированное напряжение Ux уста- навливается равным 10В, а общий коэффициент К 0,1 передачи ячейки. В этом случае согласно (9) напряжение на выходе блока 8 измерения будет равно
и ыч и 1//иг,(Ю)
где LJ,, - напряжение, поступающее с вы- хода блока 11 измерения момента
привода и пропорциональное моменту электродвигателя 2; Uг - напряжение, поступающее с выхода блока 6 измерения радиуса и пропорциональное радиусу паковки 3.
Таким образом, напряжение на выходе блока 8 будет пропорционально натяжению в соответствии с соотношением
Р - М R
Принцип работы блока 8 измерения натяжения состоит в следующем.
Если на вход подано напряжение 1J7 положительной полярности и электронные ключи 83 и 84, управляемые выходным напряжением компаратора 86, разомкнуты, поскольку выходное напряжение в этом случае отрицательное. При Ur 0 под воздействием
о напряжения U, поступающего через резистор 87, выходное напряжение интегратора 85 начинает линейно во времени возрастать в сторону отрицательной полярности. В некоторый момент времени выходной сигнал ин- reipaTopa 85 сравнивается по действию с входным сигналом II,, поступающим через резистор 89, и компаратор 86 изменит свое состояние, на его выходе появится напряжение положительной полярности и электронные ключи 83 и 84 замкнутся.
С этого момента времени на интегра0 тор 85 и компаратор 86 подключаются дополнительные входы соответственно через электронные ключи 83 и 84, коэффициент передачи по которым в два раза больше. Поскольку через эти дополниК .тьные входы поступает сигнал Uz с отрицательной полярностью через инвертор 82. то производная выходного напряжения интегратора 85 меняет знак, и выход 85 начинает увеличиваться в сторону положительной полярности. При этом изменяется и полярность
Q порога переключения компаратора 86, который вновь срабатывает по достижении выходным напряжением интегратора 85 этого порога. Далее цикл повторяется.
В результате на выходе интегратора 85 формируется пилообразное напряжение, сим5 метричное относительно нуля и с одинаковой крутизной, а на выходе компаратора 86 -- прямоугольные ра жополярные импульсы со скважностью, равной двум.
При наличии входного сигнала 11Х в за висимости от его полярности изменяются значения положительной и отрицательной производных выходного напряжения инте гратора 85 При этом пропорционально и, изменяется длительность положительных и отрицательных импульсов на выходе компаратора 86
Напряжение U подается через электронный ключ 90 на вход усилителя 19, выходное напряжение которого представляет собой импульсы положительной или отри цательной полярности в зависимости от знака напряжения U,, с амплитудой, пропорциональной Jy Скважность этих им пульсов определяется режимом работы электронного ключа 90, управляемого выходным напряжением компаратора 86 Выходное на пряжение фильтруется и поступает на вход выходного усилителя 92, одновременно выполняющего роль активного фильтра С вы хода напряжение отрицательной полярности и пропорциональное натяжению, иоступает через резистор 21 на вход регулятора 19 натяжения (фиг 1 и фиг 5)
Блок 11 измерения момента (фиг 1 и фиг 6) привода предназначен для усиле ния напряжения, снимаемого с шунта 10 и пропорционального ток якоря и момент электродвигателя 2 и для гальванического разделения цепей якоря и устройства для ре гулирования натяжения Вход блока 11 из мерения момента привода является входом ячейки датчика тока, а выход - выходом ячейки датчика тока (фиг 1 и фиг 6)
Входной сигнал с шунта 10 на модулятор 93 (фиг 6), с выхода которою напряжение прямоугольной формы через по тенциальный разделитель 94 поступает на усилитель 95
Усиленное напряжение подается на демо дулятор 96, с выхода которого сигнал по ступает на выходной усилитель 97 Генератор 98 коммутирующею сигнала управпяет работой модулятора 93 и демодупятора 96 (фиг 6) С выхода усилителя 97 напряже ние, пропорциональное току якоря и соот ветственно электромагнитному момент элек тродвигателя 2, подается на вход регулято ра 13 момента и на вход блока 8 измерения натяжения (фиг .1 и фиг 6)
0
5
0
5
0
5
0
5
Фоомула 1ло6репни ,
1Устройство для регулирования н INKC ния при намотке длинномерного маириа i i содержащее блок управления прино юм и ковки, блок измерения радиуса паконки б к к измерения и затания и регулятор ния длинномерного материапа охваченный обратной связью, допопнитепьный заы чик натяжения длинномерного материа ia и nept ключатели, отличающееся тем что с цепью расширения технологических возможностей оно дополнительно имеет датчик чис па с ю ев паковки, блок измерения натяжения и первым входом связанный с ним perv тятор момента привода, а также бпок задания мо мента привода причем блок измерения ра диуса паковки входом соединен с вычошм датчика числа слоев паковки, первым выхо дом связан с первым входом б пока измере ния натяжения члинномерного материаia и замыкающим контактом первого гирек нома теля, а вторым выходомс размыкаю щим контактом первого переключате ш вы хот. которого связан через дополните задатчик натяжения с первым вм мм регулятора натяжения длинномерною M,UI риала второй вход которого соещнен с вы ходом блока измерения натяжения а третий вход через второй переключатепь i выхо дом блока затания натяжения выхо i б юка задания момента привода юе ишен черсм rpt тий переключатель с вторым входом рему i i тора момента привода третий вход которою связан с выходом регулятора натяжения иб ратная связь которого зашу нтирована чечир- тым перекпючате юм при этом выхо i б юка измерения момента привода юешнен с вто рым ВХОП.ОМ б пока измерения натяжения длинномерного материа па а выхо pei 1ято ра момента привота связан с вхощм управления приводом
2Устройство по п 1 от шнающач я iev что блок измерения паковки со iep жит задатчик начального ратиуса паковки и пос 1еп,оватепьно сое пшенные опкн 1ек гронныи коммутатор, счетчик суммирующий усилитель и инвертор причем нхо i oirci электронного коммутатора является вхоюи блока измерения радиуса паковки мирующего усилителя ад по пни тс 1ыю связан с выхоадм задатчика начапьною паковки а его выход является первым выходом бтока измерения радиуса паковки
ВТОрЫМ ВЫХОДОМ КОТОрОЮ ЯВ1ЯеТсЯ ВЫХ( I
инвертора
0 ч (J 0
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования натяжения длинномерного материала при перемотке | 1986 |
|
SU1395579A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ЛЕНТОЧНОГО МАТЕРИАЛА | 2014 |
|
RU2559645C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ЛЕНТОЧНОГО МАТЕРИАЛА | 2012 |
|
RU2523291C2 |
| Устройство для регулирования натяжения длинномерного материала | 1986 |
|
SU1416421A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ЛЕНТОЧНОГО МАТЕРИАЛА | 2016 |
|
RU2675314C2 |
| Электропривод переменного тока | 1984 |
|
SU1164853A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ЛЕНТОЧНОГО МАТЕРИАЛА | 2016 |
|
RU2626735C1 |
| Устройство для управления агрегатом перемотки полосы | 1987 |
|
SU1574311A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ЛЕНТОЧНОГО МАТЕРИАЛА | 2013 |
|
RU2536488C2 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ ТКАНИ В РУЛОН | 2015 |
|
RU2608683C2 |
Изобретение относится к средствам автоматического управления наматывающими устройствами. Цель изобретения - расширение технологических возможностей. Для этого устройство предусматривает возможность намотки паковки при постоянном натяжении или в зависимости от радиуса паковки с уменьшающимися или увеличивающимися натяжениями. 1 з. п. ф-лы. 6 ил.
От 13
59
-&
40
-Й41
&
42
45
Фиг.2
s
К2
Фив. 3
61
a
CmS
56
} ГУ
Фц,з.
v :хД «О
ic
io а-
Ci
I
| Авторское свидетельство СССР № 1299930, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
