1
Изобрете ше относится к устройствам для регулирования натяжения, конкретнее к устройствам для стабилизации натяжения нитей при перемотке.
Цель изобретения - повышение стабилизации натяжения.
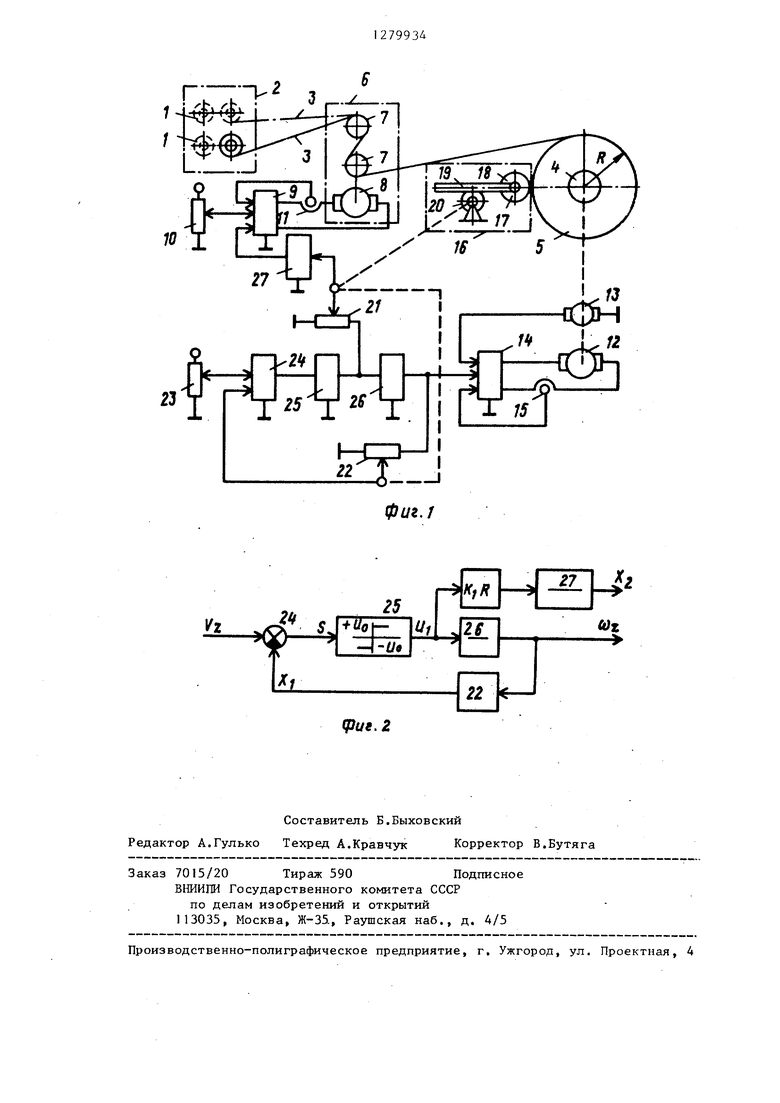
На фиг,1 изображена структураня схема устройства; на фиг.2 - то же, замкнутого контура регулирования.
Питающие паковки 1 установлены в несколько горизонтальных и верти- капь ных рядов в шпулярнике 2. Нити 3 с питающих паковок 1 переметывают на наматывающий ролик 4, в результате чего формируют наматываемую паковку 5, например сновальный валик. ежду питающими паковками 1 и наматываемой паковкой 5 установлен ните- натяжитель 6, взаимодействующий с нитями 3. Нитенатяжитель 6 имеет натяжные ролики 7, которые выполнены с возможностью вращения за счет охвата поверхности роликов движущимися без проскальзывания относительно них нитями 3. Натяжные ролики 7 механически связаны с тормозом 8, ко торый может быть-разли 1ной конструкции, например в качестве тормоза 8 может быть использован электродвигатель постоянного тока в тормозном режиме. Тормоз 8 подключен к выходу блока 9 управления нитенатяжителем 6, вход которого подключен к задатчику 10, Конструкция блока 9 управления нитенатяжителем 6 зависит от конструкции нитенатяжетиля 6 и тормоза 8, Этот блок может быть выполнен, например, в виде стабилизатора тока на основе тиристорного инвертора с обратной связью по току с датчика 1 тока тормоза 8. Наматывающий ролик 4 с паковкой 5 кинематически связан с электродвигателем 12 и датчиком 13 угловой скорости электродвигателя (например, тахогенератором), Электродвигатель 12 подключен к выходу блока 14 управления приводом, который может быть выполнен, например, . в виде типовой двухконтурной системы подчиненного регулироватшя угловой скорости электродвигателя по- -стоянного тока с обратными связями по току с датчика 15 тока электродвигателя 12 и по угловой скорости с датчика скорости 13. Датчик 16 диаметра паксвки 5 выполнен в виде ролика 17, ОСУ: вращения 18 которого
W
12799342
посредством зубчатой рейки 19 и зубчатой щестерни 20 механически связана с первым 21 и вторым 22 делителями напряжения. В качестве датчика диаметра 16 могут быть использованы, например, на сновальной ма шине элементы конструкции укатывающего вала. Ролик 17 прижат к поверхности паковки 5 с помощью дополнительного средства (не показано), например с помощью пневмоприжима, и имеет возможность линейного лере- мещения в диаметральной плоскости паковки 5 по мере изменения ее метра (радиус R). Устройство содержит задатчик линейной скорости 23 паковки 5 и последовательно включенные сумматор 24, релейный элемент 25 и интегратор 26, при этом входы сумматора 24 подключены к задатчику линейной скорости 23 и к управляющему элементу второго делителя на- ртряжения 22, Выход релейного элемента 25 подключен к входу первого делителя напряжения 21, управляющий элемент которого через электрический фильтр 27 связан с входом блока 9 управления нитенатяжителем 6, а выход интегратора 26 подключен к входу второго делителя 22 напряжения и к входу блока 14 управления приводом паковки 5. Сумматор 24, релейный элемент 25, интегратор 26 и электрический фильтр 27 могут быть реализо35 ваны, например, на основе операционных усилителей.
Устройство работает следующим образом,
Для структурной схемы,- приведен ной на фиг.2 справедливы уравнения
20
25
30
м
45
50
S V, - .
и UQ sign S; UQ const,; (1)
W I,T - ,7 - rp f dt T,
где ТI - постоянная времени интегратора 26 i
Up - величина напряжения релейного элемента 25,
Если коэффициент передачи делителей 21 и 22 напряжения прямо пропор- ционален паковки 5, то
Uo
k,- k,
R
(2)
«7
J2 - R U| 55 где К j - коэффициент пропорциональности,
В рассматриваемом замкнутом контуре возникает скользящий режим, если обеспечены условия, при которых S
м
5
0
S V, - .
и UQ sign S; UQ const,; (1)
W I,T - ,7 - rp f dt T,
где ТI - постоянная времени интегратора 26 i
Up - величина напряжения релейного элемента 25,
Если коэффициент передачи делителей 21 и 22 напряжения прямо пропор- ционален паковки 5, то
Uo
k,- k,
R
(2)
«7
J2 - R U| 5 где К j - коэффициент пропорциональности,
В рассматриваемом замкнутом контуре возникает скользящий режим, если обеспечены условия, при которых S
разные знаки,
(1) с учетом
dxjL dV
dt
Из систе- (2) елеHIS Ck ..о J dt dWz dt
+ k,- (0.
dR. (3)
Если текущий радиус R паковки 5 меня ется значительно медленнее, чем V (например, при разгоне), что и имеет место при намотЛе тонких нитей, то dR
-- О и тогда, с учетом (1) dt
dS dt
dV „ dt
p.iPj: dt
dVz k,R-, d
(A)
Из(1) и (A) следует, что условия возникновения скользящего режима для {рассматриваемой cxeNbi сводятся к выполнению условия
Ji . EYi
и.
k,R
dt
(5)
Выполнение этого условия можно
обеспечить путем выбора U,
f I
К
при известных радиусе наматывающего ролика 4 и максимальном радиусе R паковки 5, а также путем ограничения скорости измеиения V, Последнее можно обеспечить практически, например, путем установки пассивного фильтра на входе V сумматора 24 или путем использования задатчика интенсивности. При выполнении условия (5) S«0, и, следователь- с учетом (2)
но,
W,
-IS k,R
(6)
Из (6) видно, что выходной сигнал U интегратора 26 представляет собой частное от деления сигнала задатчика линейной скорости 23 на величину, пропорциональную радиусу паковки 5, Выходной сигнал не зависит от возмущений, поскольку деление происходит в замкнутой системе с организацией в ней скользящего режима. Если разрывную выходную величину U первого делителя 21 подать на вход электрического фильтра 27, то на выходе последнего при идеальном скользящем режиме будет выполняться условие
lira X, и,„. k,T.-2.(7)
О
ЭКБ
k т --
где и
9KB
dS решение уравнения
(см, (4)) относительно U, с учетом (2);
Kj - козф(|ициент передачи электрического фильтра 21i Tj - постоянная времени электрического фильтра 27. Из (7) следует, что выходная величи- на X электрического iJembTpa 27 пропорциональна производной от сигнала заданного значения линейной скорости, задаваемой задатчиком 23, Для пояснения работы устройства рассмотрим теперь известные основные соотношения для нитенатяжителя 6, Уравнение динамики для нитенатяжителя 6
М MOМ,
dQp dt
(8)
5
М
Fo Rp
0
5
0
5
0
где М FR - момент, coздaвae ый силой натяжения нитей F между нитенатяжителем 6 и наматываемой паковкой 5
Rp - радиус натяжных ролигч ков 7 i
момент, создаваемый силой натяжения нитей FP между питающими паковками и нитенатя- жителем 6 М - момент, создаваеь| 1Й
тормозом 8, при использовании в качестве тормоза электродвигателя, при постоянном потоке возбуждения М М + +
- момент, обусловленный механическими потерями в нитенатяжителе 6; К - коэффициент пропорциональности между моментом и током I электродвигателя;
I - суммарный момент инерции элементов нитенатяжителя 6|
СОр - угловая скорость роликов 7 нитенатяжителя 6,
в
55
(9)
(10)
где V - линейная скорость натяжных роликов 7, которая при отсутствии проскальзывания совпадает со скоростью движения (перематывания) нитей.
Из (10) при -а dt
О вытекает уравнение статики нитенатяжителя 6
- Г„
12. SSM
R
Р
f
О,
(П)
Для перематывания нитей 3 при
известных величинах F.
М,
о то р М
задатчиком 10 натяжения устанавлива.- ют такое значение тока электродвигателя 8, которое, в соответствии с уравнением (11), обеспечивает заданное натяжение F нитей 3, В дальнейшем это значение тока по,вдерживают постоянным с помощью блока 9 управления нитенатяжителем 6 и датчика тока 11 тормоза 8, Затем включают бЛок 14 управления приводом и задатчиком 23 устанавливают заданное значение линейной скорости V2 const, При этом на выходе интегратора 26, в соответствии с уравнением (6), устанавливается здданное значение угловой скорости COj, а с помо1цью блока 14 управления приводом - соответствующая этому значению фактическая, угловая скорость электродвигателя 12 и паковки 5, Необходимую для этого статику и динамику регулирования угловой скорости формируют с помощью блока 14 управления приводом, датчика тока 15 электродвигателя и датчика скорости 13, Таким образом, устанавливают соответствие между заданной и фактической линейной скоростью нитей 3. При V2 const, согласно уравнению (), выходной сигнал электрического фильтра 27 равен нулю. В начале намотки паковки 5 ролик 17 датчика диаметра 16 занимает (фиг.1 положение соответствующее радиусу наматывающего ролика 4. По мере наматывания паковки 5 ее радиус возрастает, что вызывает увеличение линейной скорости нитей 3. Однако увеличение радиуса паковки 5 приводит к перемещению ролика 17, связанной с его осью 18 зубчатой рейки 19, зубчатой шестерни 20 и
управляющих элементов первого и второго делителей 21 и 22, При этом перемещение управляющего элемента второго делителя 22 напряжения, согласно уравнению (6), приводит к уменьщению выходного сигнала интегратора 26, угловой сокрости электродвигателя 12 и паковки 5, т.е. к восстановлению заданного значения линейной скорости. Таким образом, стабилизация линейной скорости нитей 3 в процессе перематывания осуществляется автоматически. Перемещение управляющего элемента делителя 21 напряжения не приводит к изменению сигнала на выходе электрического фильтра 27, поскольку V const и, следовательно
вательно.
ЙУ
dt
О. При необходимости
изменения линейной скорости, например при переходе с заправочной на рабочую скорость, изменяют выходное напряжение задатчика 23 линейной
скорости паковки 5 с темпом, который определен условиями (5) существования скользящего режима. При изменении линейной скорости .нитей в системе регулирования натяжения возникает динамическая ошибка, обусловленная правой частью уравнения (10),Однако одновременно при изменении линейной скорости нитей на выходе электрического фильтра 27 и, следовательно, на входе блока регулирования нитенатяжителем 9 появляется сигнал, величина которого определена уравнением (7). Сравнивая (7) и (10) и учитывая, dV dV dt dt
что
, очевидно, что дина0
мическая ошибка натяжения автоматически компенсируется. Это происходит путем изменения (в данном случае 5 уменьшения) тока якоря электродвиI
R
гателя 8 при условии Р
k .Т
Kj i, ,
которое при известных I, Кь и выбранном раннее Tj может быть легко выполнено путем установки коэффициента передачи Kj электрического фильтра 27;
4 т,
23
фиг./
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости намотки нитей | 1981 |
|
SU1341137A1 |
| Устройство для регулирования натяжения длинномерного материала при перемотке | 1986 |
|
SU1395579A1 |
| Устройство для регулирования скорости намотки нити | 1976 |
|
SU602456A1 |
| Электропривод моталки прецизионного агрегата | 1984 |
|
SU1288876A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ НИТИ НА БОБИНУ | 1992 |
|
RU2015099C1 |
| Устройство для регулирования натяжения нитей основы на ткацком станке | 1988 |
|
SU1633036A1 |
| Устройство для регулирования натяжения полосового материал | 1976 |
|
SU568471A1 |
| Устройство для намотки нити | 1988 |
|
SU1560456A1 |
| Устройство для наматывания нити на бобину | 1987 |
|
SU1444261A1 |
| Регулятор натяжения | 1980 |
|
SU895876A1 |
И2
f4S
X1
KtK
г
Z6
Шг
(
