(Л
00
со ел
СП
со
фиг.1
Изобретение относится к средствам регулирования натяжения на перемоточных машинах.
Цель изобретения - повышение точности регулирования.
На фиг. 1 изображена структурная схема устройства; на фиг. 2 - структурная схема блока оценки натяжения.
Устройство содержит электродвигатель. 1 подающего механизма 2, электродвигатель 3 наматывающего механизма 4 с паковкой 5, образованной намотанным материалом 6, ти- ристорный преобразователь 7, подключенный к якорю электродвигателя i, регулятор тока .8, выходом подключенный к тиристор- ному преобразователю 7, датчик тока 9, ыход которого подключен к входу регулятора тока 8. Датчик 10 скорости подающего механизма 2, блок 11 управления Приводом наматывающего механизма, блок 12 оценки скорости намотки, первым выходом подключенный к блоку управления И, датчик радиуса паковки 13, связанный с блоком 12 оценки скорости намотки, задатчик натяжения 14, задатчик скорости намотки 15, Последовательно включенные блок оценки натяжения 16, сумматор 17, компаратор 18 и интегратор 19. Выход интегратора 19 подключен к регулятору тока 8 и к первому Входу блока оценки натяжения 16, вторым Входом связанного с датчиком 10 подающего механизма 2, а третьим входом - со вторым выходом блока 12 оценки скорости намотки. Третий выход блока 12 оценки скорости намотки и выход задатчика 14 натяжения соединены с соответствующими входами сумматора 17. Регулятор тока 8 предназначен для компенсации инерционности скорной цепи электродвигателя 1 и нелинейности, обусловленной пульсациями тока якоря. Он может быть выполнен в виде пропорционально-интегрального регулятора. Интегратор 19 предназначен для формирования среднего значения сигнала компаратора 18.
Датчиком скорости 10 служит тахогене- ратор постоянного тока. Блок управления 11 выполнен в виде двухконтурной системы подчиненного регулирования с обратными связями по току якоря и скорости электродвигателя 3. Задатчиком натяжения 14 и задат- чиком скорости 15 служат потенциометры. Блок оценки скорости намотки 12 предназначен для получения информации о величине линейной скорости намотки и ее производной и обеспечивает достоверную информацию о линейной скорости намотки и ее производной по времени- Блок оценки скорости намотки 12 выполнен в виде последовательно включенных сумматора 20, вход которого подключен к задатчику скорости 15, компаратора 21 и интегратора 22, выход которого подключен к входу блока управления 11..Блок оценки 12 скорости намотки
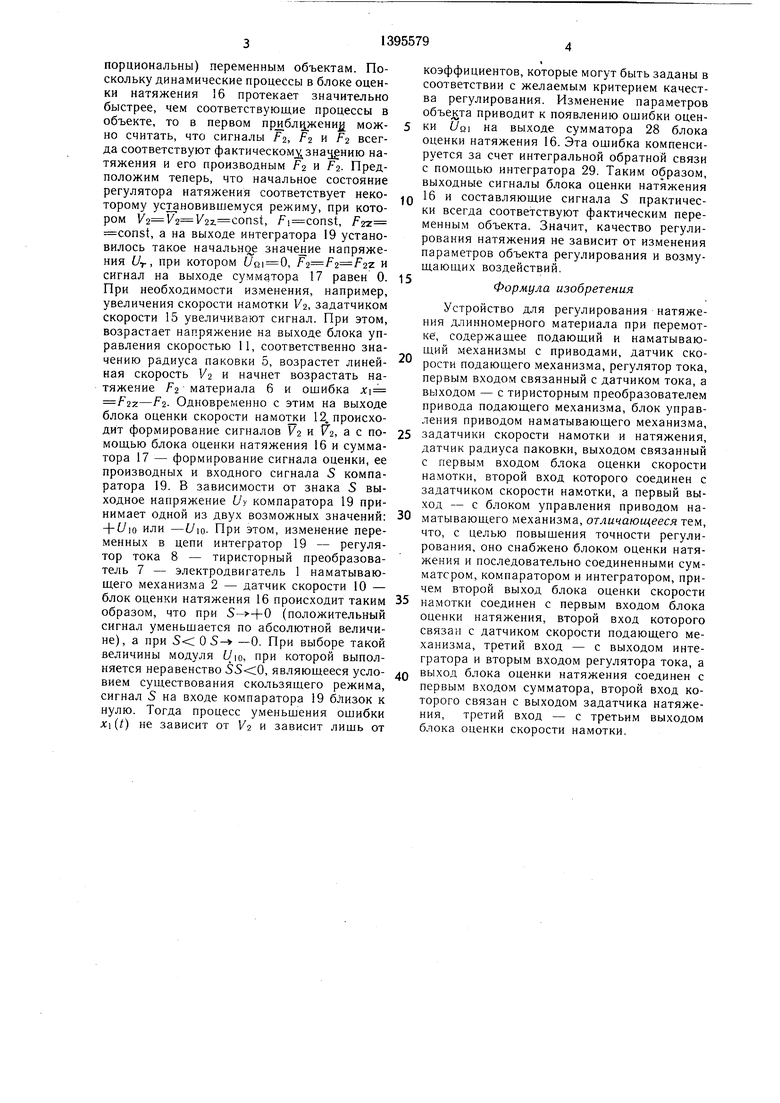
имеет два делителя 23 и 24 в виде переменных резисторов и электрический фильтр 25. Вход делителя 23 подключен к выходу компаратора 21, а скользящий контакт, являющийся выходом делителя 23 кинематически связан с датчиком диаметра 13, а электрически - с входом электрического фильтра 25. Вход делителя 24 подключен к выходу интегратора 22, а скользящий контакт делителя 24 кинематически связан с датчи ком диа.метра 13 и электрически - с входом сумматора 20. Блок оценки скорости намотки 12 представляет собой динамическую систему, функционирующую в скользящем режиме, что обеспечивает получение на выхр5 де электрического фильтра 25 сигнала 1/2, пропорционального производной по времени от линейной скорости намотки, а на выходе делителя 24 - сигнала V, пропорционального лшейной скорости намотки. Сигналы i/z и У2 являются выходными сигна0 лами блока оценки скорости намотки 12. Блок оценки натяжения 16 содержит последовательно включенные сумматор 26, интегратор 27, сумматор 28,. интегратор 29, сумматор 30 и интегратор 31. Входными сигнаC лами блока оценки натяжения 16 являются сигналы J/2, Mai j} Ur, а выходными - сигналы QI, FZ и FZ. Блок оценки натяжения 16 представляет собой систему с обратной связью, обладающую заданными динамическими свойствами.
« Блок оценки натяжения 16 реализует динамическую систему с заданными постоянными коэффициентами обратной связи, обеспе- чивающими желаемый темп затухания ошибки оценки на выходе второго сумматора 28. Эти коэффициенты выбирают
5 таким образом, чтобы процессы в системе протекали быстрее, чем процессы в объекте и чтобы одновременно обеспечивалась фильтрация помех, содержащихся во входных сигналах блока оценки натяжения 16. Сумматор 17 предназначен для формирова0 ния входного сигнала компаратора 18. Для реализации алгоритма в предлагаемом ус тройстве вместо FZ, /2 и F-2, которые недоступны для непосредственного измерения, использованы соответствующие оценt; ки F, РЧ, полученные в блоке оценки натяжения 16.
Блок оценки натяжения 16, сумматор 17 и компаратор 18 и интегратор 19 реализуется на основе операционных усилителей. Устройство работает следующим образом.
0 При изменении входных непрерывных сигналов 1/2, UQ и (Ут блока оценки натяжения 16 на выходе сумматора 28 возникает сигнал ощибки оценки -t/ai, который, в качестве сигнала обратной связи поступает на входу сумматоров 26 и 30 и
5 интегратора 29. В результате этого протекает процесс уменьщения OQI до нуля. При Ь н1 0 выходные сиг алы блока оценки натяжения 16 2, FZ, S2i соответствуют (пропорциональны) переменным объектам. Поскольку динамические процессы в блоке оценки натяжения 16 протекает значительно быстрее, чем соответствующие процессы в объекте, то в первом можно считать, что сигналы Fz, Fz и F всегда соответствуют фактическом зна нию натяжения и его производным FZ и Fi. Предположим теперь, что начальное состояние регулятора натяжения соответствует некоторому установившемуся режиму, при котором .const, / i const, Fzz const, a на выходе интегратора 19 установилось такое начальное 3Ha4ejiHe напряжения U-r, при котором , F i F2 F 2-z. и сигнал на выходе сумматора 17 равен 0. При необходимости изменения, например, увеличения скорости намотки Vi, задатчиком скорости 15 увеличивают сигнал. При этом, возрастает напряжение на выходе блока управления скоростью 11, соответственно значению радиуса паковки 5, возрастет линейная скорость 1/2 и начнет возрастать натяжение F2 материала 6 и ошибка jti р27--FZ- Одновременно с этим на выходе блока оценки скорости намотки 12, происходит формирование сигналов Vz и 2, а с помощью блока оценки натяжения 16 и сумматора 17 - формирование сигнала оценки, ее производных и входного сигнала S компаратора 19. В зависимости от знака S выходное напряжение Uy компаратора 19 принимает одной из двух возможных значений: или -UiQ. При этом, изменение переменных в цепи интегратор 19 - регулятор тока 8 - тиристорный преобразователь 7 - электродвигатель 1 наматывающего механизма 2 - датчик скорости 10 - блок оценки натяжения 16 происходит таким образом, что при (положительный сигнал уменьшается по абсолютной величине), а при О S- -0. При выборе такой величины модуля , при которой выполняется неравенство , являющееся условием существования скользящего режима, сигнал S на входе компаратора 19 близок к нулю. Тогда процесс уменьшения ошибки х (t) не зависит от 1/2 и зависит лишь от
коэффициентов, которые могут быть заданы в соответствии с желаемым критерием качества регулирования. Изменение параметров объел та приводит к появлению ошибки оценки UQ на выходе сумматора 28 блока оценки натяжения 16. Эта ошибка компенсируется за счет интегральной обратной связи с помощью интегратора 29. Таким образом, выходные сигналы блока оценки натяжения
16 и составляющие сигнала S практически всегда соответствуют фактическим переменным объекта. Значит, качество регулирования натяжения не зависит от изменения параметров объекта регулирования и возмущающих воздействий.
Формула изобретения
Устройство для регулирования натяжения длинномерного материала при перемотке, содержащее подающий и наматывающий механизмы с приводами, датчик ско рости подающего механизма, регулятор тока, первым входом связанный с датчиком тока, а выходом - с тиристорным преобразователем привода подающего механизма, блок управления приводом наматывающего механизма,
5 задатчики скорости намотки и натяжения, датчик радиуса паковки, выходом связанный с первым входом блока оценки скорости намотки, второй вход которого соединен с задатчиком скорости намотки, а первый выход - с блоком управления приводом на0 матывающего механизма, отличающееся тем, что, с целью повышения точности регулирования, оно снабжено блоком оценки натяжения и последовательно соединенными сум- матсром, компаратором и интегратором, причем второй выход блока оценки скорости
5 намотки соединен с первым входом блока оценки натяжения, второй вход которого связан с датчиком скорости подающего механизма, третий вход - с выходом интегратора и вторым входом регулятора тока, а
0 выход блока оценки натяжения соединен с первым входом сумматора, второй вход которого связан с выходом задатчика натяжения, третий вход - с третьим выходом блока оценки скорости намотки.
фиг. 2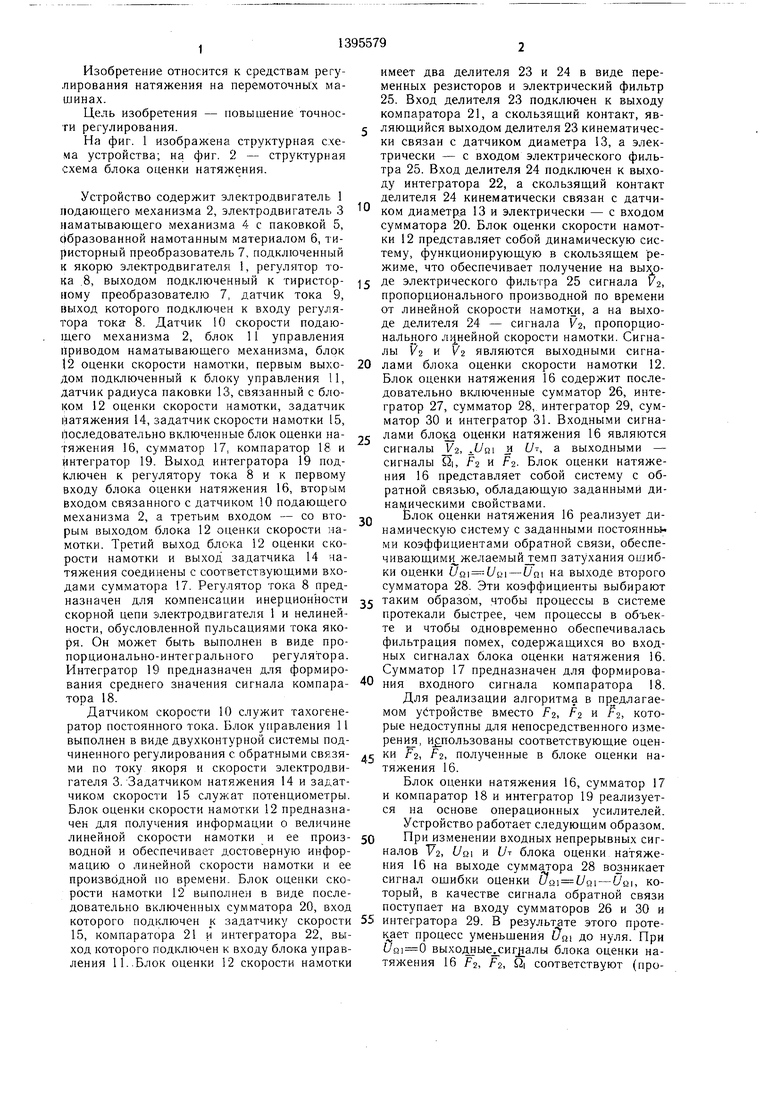
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости намотки нитей | 1981 |
|
SU1341137A1 |
| Устройство для стабилизации натяжения нитей при перемотке | 1985 |
|
SU1279934A1 |
| Устройство для регулирования натяжения длинномерного материала в поточной линии | 1988 |
|
SU1613420A1 |
| Устройство для регулирования натяжения нити на мотальном автомате | 1981 |
|
SU1027127A1 |
| Устройство для регулирования натяжения при намотке длинномерного материала | 1988 |
|
SU1627488A1 |
| Устройство для регулирования натяжения нитей основы на ткацком станке | 1988 |
|
SU1633036A1 |
| Регулятор натяжения | 1980 |
|
SU895876A1 |
| Устройство для автоматического регулирования натяжения при намотке рулонного материала | 1988 |
|
SU1595774A1 |
| Устройство для намотки нити | 1987 |
|
SU1519989A1 |
| Устройство для регулирования плотности паковки в процессе наматывания длинномерного материала | 1984 |
|
SU1321654A1 |
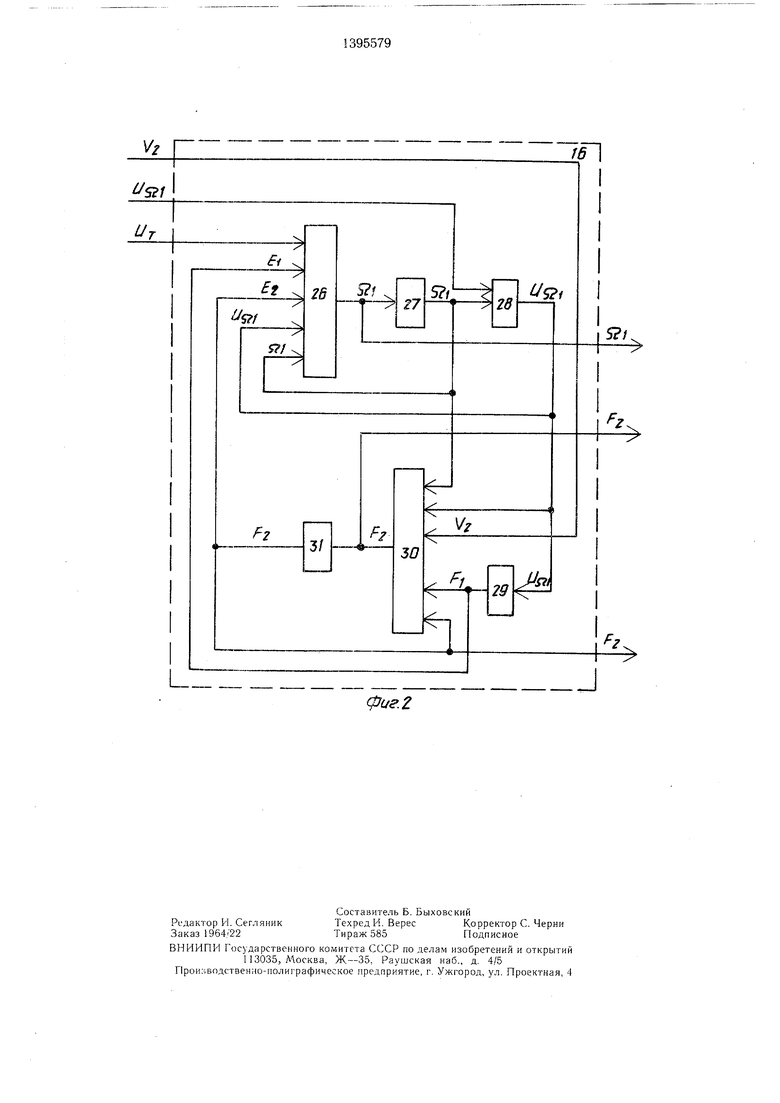
Изобретение относится к средствам регулирования натяжения на перемоточных .-iiмашинах. Цель изобретения - повышение точности регулирования. Устройство содержит электродвигатель 1 подаюш.его механизма 2 с блоком управления и электродвигатель 3 с блоком управления наматы- ваюш,его механизма 4 паковки 5, блок 12 оценки скорости намотки и блок 16 оценки натяжения, реализующий динамическую систему с заданными коэффициентами обратной связи. При изменении входных непрерывных сигналов о скорости электродвигателя 3, диаметре паковки 5 и скорости подающего механизма 2 блок 16 оценки натяжения исключает динамическую ошибку регулирования, позволяя поддерживать постоянство натяжения перематываемого материала 6. 2 ил. с S
| Двухдвигательный электропривод постоянного тока | 1981 |
|
SU978307A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
