1г
i : р - : :.;е о rfitK MTL-я v r iM;rpo. V.- Ill i-MMMi pHTejbHoH I exHJjKe, м т бытт; : польч ./влнп ;м1,1 и: мереН|;я гометри- 1( .Р if i l - f дета.,, . ыкжг л
у: ТрОЙСТ ii( л аиТЧ МаТИКН - ЯН ГЯ -Т . Я
успяершее:тт).м- анием изоГц стРиич sici ант . ел . 1 1 Ч ) /9 ,
Целью И э0ретения ивляе гся :;оны- ;11С }П С ii; HocTH нзмс-рпиия иеремеще- ;;и; путем 1а)мпенсации Ш пинейиости 1 -1ходН( хлрактернс тики ири бразова- ния ,
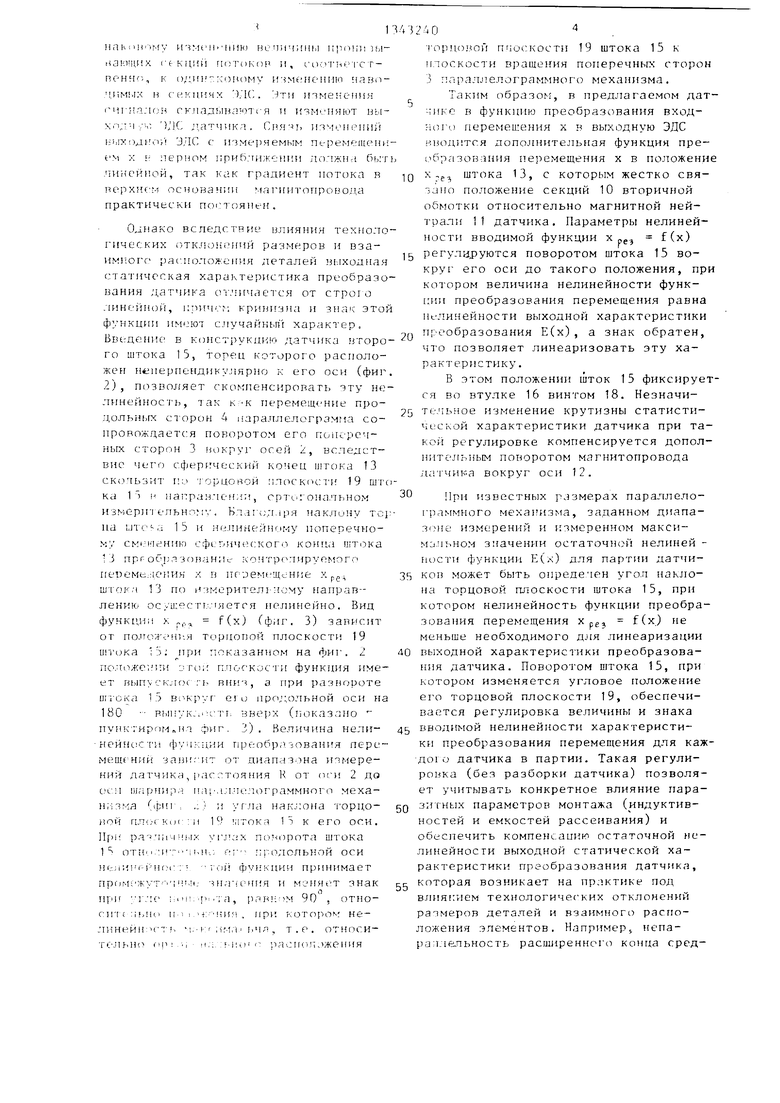
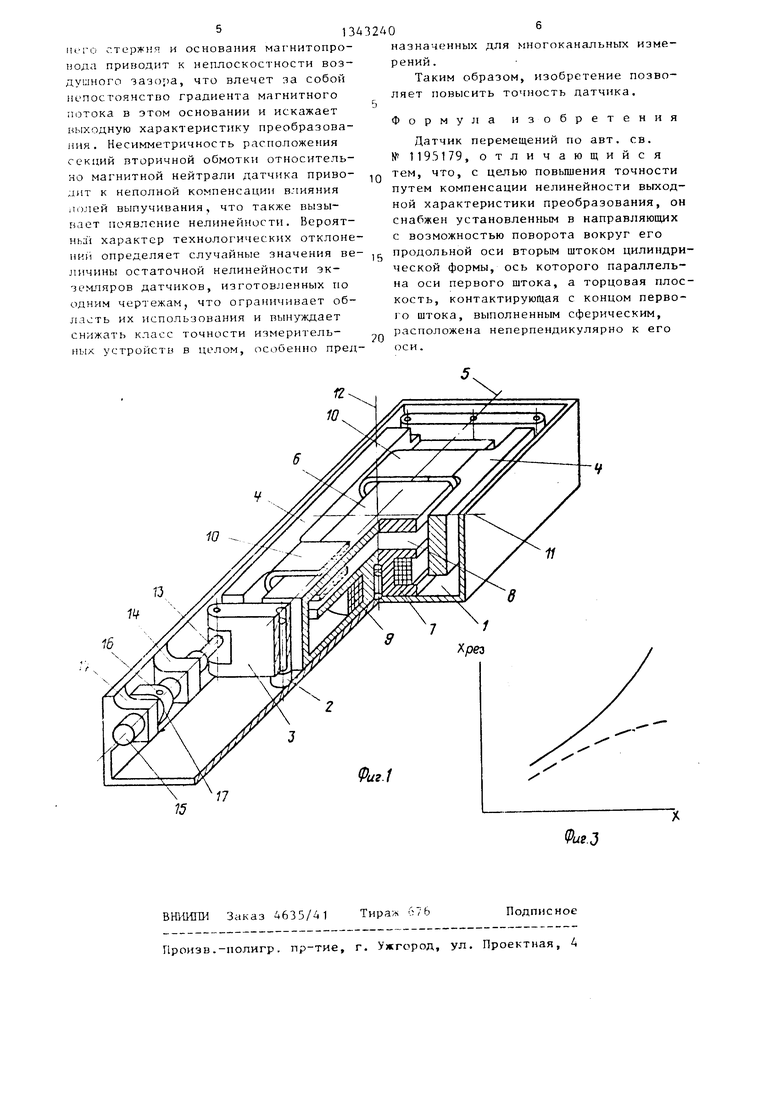
На linii . 1 Г1рсдстлн::ена „очсгрук- датчика перемещенннj на (liiir. - чагть датчика, в которой оосс:п чина- С Т(я (реобратование к(Жтрп.1:ируемЬ)Х чоремещьний х в перем-лцрниях х ppj ; м 1пижьой часч И дап чнка; и;) фиг . - нлрианты ф /икцни nptsi p,) И) перемещении Хрр 1 (xj .
Датчик перемещений содержит кор- :г/с 1, в основании которого закреп- л;.ны оси 2, входящие 1 отверстия в ( рединах поперечных стооо.ч 1 luapuup чиго napa. iJieJioi paMMHor o механизма . 1,)одольнр,1е стороны 4 зтоги механизма парал. продольной oi4i 5 сиг-тмет- рмм п.атчика , аг :и 1ч:1пп.,-Гмш 6 i: -poHe;ioi ГИГКЯ И.,.;ОГ уК05И)Ч; ИЫЙ Сре,.П1ИЙ i С ЮООДКМ/ Ь .ЧТеД : i ( :;) О ; : 3i: lipeH ,, )pt- i V- 1 : ,-i llOll аЧ lii M МЛГ;;t: ; Oiiprij i;i,.i iii.uKii,: : д - 1г : ..й я. На I ом Т;:. ;)- ит|1чро -: ;да .-г мешещ ri; :r- / . дат чи- ка. ,Tnt ,:., инаковые по 1. 1зг-: и ,
:;у BHTKLJi; секции И/ З nipli Jllo; С бмоТ
ки С1ХУ1тываюг с с ювлние мл нтч. про- вода ( f областт во-1дуи нпт о 8 и расположен си1-1метрггчно o t но т-п ii) H:) .ча г пи Г и ч нейтра :; ч |: Ч1П Л , Оекцчи 10 ч);п; ill ; .:.:,-}- .:.. ; ),4,: nt-ii с-слело лт .;:;,iu- ррчнс iii -v; нгиге- мик, ,-. м;и fijiTii /му отс-: у. с; з да )лемо- г. У Г1ер-;пчной oOMo vv..ni 9. ),ая сек-- Ui -.i 10 3af.peiiTPHa на одной из чр1)л.ол Hr.iA 1. )OH j чармл.челограммног о меха H Mf.a, Магнмтопровол 6 ус Т .чнг-илен н корпусе датчика с возможное -in пс:-- И1 71 VJ а Н 1Кр т пер ика.ч ичч огл имметрии ;131 -1ика, Ч1Ч1 чозв .чяст ре- гулироннт Kpyj U3Hy xapai 1Ч рИ ,; П1(и i;pecif pa3i:,..TНИ) л.ачч.и к.) U;up;i4 i i нр .;-П 1рЦИО|| ЛЛ 1.ЧП П{ -, yi ля HC-flOpC ::} с цел1.ю -Miu i ca:,.,- в;;ия1;и5: Л е/:- ь -ки X ; ч к ь .--..иг1 р Л-мероп де- тл.чеи и раз1 ч о. . ..УЧ. in м. -i l-iia ia . ciHiHi из 4|iii: , о гтмр -ч i .|I ,.j,, , 1 -iM. , , I ,: f,| , :.;l( СПК П JIP:
-
i2. 40
|1,1И li/oi .; 1 i, отм|)1.й 4v,+;;rr . рмя- щ да , лика v .л-.. ом и мереги1и, I i и,м11чу-е 1 V с-глиовле;11,1 1|ям;цие 1-4, . ) рлзмс;(ев с В;; 44i.AHi к:-- I bij 11млоре ;а . 1 , :.(: с io;i
м(Ч1 -1 ri;:pi л ;iiTi.K 1 .: 44 :Ч1Ч; ( 1. I i
фо 1М;-|, ось .;. i,,.v. ;; -ь П пси не11В:чч1 iirri.;ia . К лнец иср ого
1Q I ) (фи1 . 2), контак л1ру оии1 .. штока J, (Л1 сфс ричес- ким, а 1 ор(,;я тчкк кс, i h кошакти- рую цьччт конца второго ( рчи чк. жепа неперпендикулярно : его оси. .
15 Нтулка 16, имеющая гсчосч- ую пятку 17, расположенную иаралчелпли; ксриусу 1 с небсилыиим зазо;)ом, лозвопяет с помощью винта IS заф; - сирон:гп, шток 15 в 1Ч1реД лпе)1Ном и 1:р:.)чессс регулирон- 1|, ки /датчика чпложечи lOpniaiiUi илос- кости 19 штока 1 5 .
Датчик перемещений pa6tiTaeT следующим образом,
„,, подключении rK:pi4i 4ii4i обмот1СЛ 9 к источнику 1П1танчя создаваемый ею мапштнюй поток Г1рох1 ;дит по срел- нему стержню 7 магиитонролода 6, разветвляется в нижнем основании маг- нит;1;1рон л ,;1 и проход дачес п ) -го б( с 1 рс1Г1М к верх н му г-свсч а нлю, ;мвномерН , i ч вет зля- сь 4ept:-i , 1и.чь1й ; iriop с1 pacii:iipf 1И1ый у- о- Ч1--Ч. г-релнего . i гчгкня 7, сск-- н.ия И. вторичной ()Г м ;Г1 :и ронизываЗЬ сл ся час ПтЮ мал ш; гн ч-, верхне-- I : осчо:;лчи.и, ,.- i ;)pj ,i о ве гг(ляе гся в OiBiij 8 между со(ЗТ1-етств юще; 1 сек- 1Ч1СЙ 10 и маг иитной нейтрачвю II дат- чгис1. 1К}1 пки, г1рочизь:ва О1; ие секции
40 |1), с ципа1-:овм гч, мг:,г;у.тю и п :п-тра 1
Г; ,П10 il,; раВ.ЛСЧНЛ ВСТТ /гЧНС, iro TONr/
чедстви..- --; тр- Чвсч - сое ii (чч-.- НИ11 ЗДС на li (Ч ичио; (lтки paFiha cyvr-ie 3JV. секдии. li 1Д, :ч-Ч - d5 c lfujpM .лиj yCMorii г|сч;; ме1 ;гчия X iiiTdK IT ,, : 4 .и(ч с я v 3 ,ч| лл1|.ения чч- рач чмгчк; 1С Л Л кгчлг .; 1 i и лЧ .и- Ч1Ч|1-, плох, Г;, При том nptjj;o4: HK t. : ГЧ 1 : | - i л УЧКПЧ ЧОГ,; ЛММЧО- 50 10 it X л ,1; f (14 Г5 Л Л Л С i Ч по П1Ч CO-..Чои j i li44|i I ;ЧП1 МЛ Г -(- Ч11 1 . i4a i ;;;,:ря -.г-у; ч 1Ч| f тин оси 2 1; Л(Л1е Ч ЧЧЫл сгс роил;-:
, Т,, Ч(:хлЧИ1г Л р л СЧК 40-+, ,h; I()Cpt к тЧн. c i opoH; смещения ..Ч о i} .: ЧЧЛ . , I орОН л и Ч ЯЗЛНЧПХ : . 111 , 1 П Гор;г л I if i ; :CiM.- т , л о МЮс;)
.. : их Ч о Л1, л i . :;.;. .t vMU n олчнл
I ЧС л ; I ЛН1-, , 1Ч ИПО ЛИГ н ,1. I
П/. }
Hai . ; 1Ц 1Г-(у H Mt li liHHI НиЧИЧИИЫ )Ынаккцих ((-к ЦИ11 rioTotsop и, гоотьетст- пеннг,, к о, ;и1 -::()иому ичмекеиию 1авп- ч,им,1; н с екциях I lC.. Чти 1пмеь:еиия i 4 iia:i(;H гкладьтр-ются TI изм . Няют иы- хггтч ,:.; )ЛС д,атчика. иггменриий )Д1 1п 3JIC с И зме1)яемым пе 5емещени- ем X - периом i;pHf);iH;KeniiH должна fib Tij .чи; {сн11ой, так как градиент потока в ig перхисг-1 основании магиитопр овода практически постоянен.
Однако вследствие влияния технодо гических с.ткл; 111М1ий размеров и вза- им ;огг ;)ас.подожс| ия детадей выходная статическая характеристика преобразования датчика отличается от строго лине11Нсн 1, . кривизна и знак это функдии имеют случайный характер. Введение в конструкдию датчика иторо го штока 15, торец которого расподо- жен н перпендикулярно к его оси (фиг 2,1 , позволяет скомпенсировать эту не линейнос , так к -к перемещение про- дольн1)ГХ сторон 4 параллелограмма сопровождается поворотом его псдк реч- ных сторон 3 вокруг осей 2, вследствие чего сферический конед иггока 13 ск(1льзит . торцовой пск косм И 19 штка Г ) н на1:ранлеки;), сртогона.чьном измер ггельно;| /. Благо-длря наклону тона iJT .-.;-. 15 и не.иинейному поперечному см1Л 1с-, нию сфсг. Ичеслсого конца пп ока ; 3 прг ,-; зовани.; контр(лируемого пепеме менин х в пeJe e цeниe
шток/1 13 по измеритедгиому направлению осуществляется нелинейно. Вид функ1 ,и11 X „,,., f(x) (фиг. 3) зависит от по.гожен1-,я тордовой плоскости 19 uivtjKa 5; при показанном на фиг. 2
положе . ии эгсл: плоскости функция имеет выпу cKjifn гь вниз, а при развороте иггока 5 вс круг его проддхльной оси на 180 - выпук:. ч ТГ: вверх (1 оказано nynKTHpor-i „на фиг. 3). Величина нели- нейнс сти фумкдии преобргчзования дере- меии ний зависит от диaпaз 1нa измерений датчика,рас стояния R от оси 2 до сч И шарнира па лллелограммного механизма , ,:.) и угла HaKJ:ona т орцо- вой пл(;гкос;н 19 KiTOKri 15 к его оси. При ра - лич М1,1х yrj ax поворота штока 1 отн-|.Л1-:..,ис, пг продольной оси ве;1И1 (Ллим: : - -ой ф п;кции пр1И1имает дром; жуТ ЧЧМ(; значчлпгя и меняет знак nrii ( :. Ml, i l a, iiaBMoM 90 . относи iTi 1 ti- inin, при KOTOpON- не- .линейн: ст ь ч. lir-iro .чл, т.е. относиTt-JIMlO op: ., il.L Л-1:о О а С ПО П ЛЖе I
g
5
5
0 5
,
2 -.0 ,
торцовой ( 19 штока 15 к ПЛОСКОС1Л вращения поперечных сторон 3 парадлелограммного механизма.
Таким oбpaзo l, в предлагаемом датчике в функцию преобразования входного перемещения х в выходную ЭДС вводится дс полнительная функция пре- с.бразования перемещения х в положение У--(. штока 13, с которым жестко связано положение секций 10 вторичной обмотки относительно магнитной нейтрали 11 датчика. Параметры нелинейности вводимой функции X pg, f(x) регулируются поворотом штока 15 вокруг его оси до такого положения, при котором величина нелинейности функции преобразования перемещения равна Ht-динейности выходной характеристики преобразования Е(х), а знак обратен, что позволяет линеаризовать эту характеристику.
В этом положении шток 15 фиксируется во втулке 16 винтом 18. Незначи- изменение крутизны статистической характеристики датчика при такой регулировке компенсируется дополнительным поворотом магнитопровода д;ггч1-и .а вокруг оси 1 2 .
При известных размерах параллело- граммного механизма, заданном диапа- 3(,4ie измерений и измеренном максимальном значении остаточной нелиней - Еюсти функции Е(х) ДоЛЯ партии датчиков может быть определен угол наклона торцовой плоскости штока 15, при котором нелинейность функции преобразования перемещения х р,, f(x.) не меньше необходимого для линеаризации выходной характеристики преобразования датчика. Поворотом штока 15, при котором изменяется угловое положение ei o торцовой плоскости 19, обеспечивается регулировка величины и знака вводимой нелинейности характеристики преобразования перемеп1ения для каждого датчика в партии. Такая регулировка (без разборки датчика) позволяет учитывать конкретное влияние пара- зигных параметров монтажа (индуктив- ностей и емкостей рассеивания) и обеспечить компенсапию остаточной нелинейности выходной статической характеристики преобразования датчика, которая возникает на пр;1ктике под в1Н1Я1:ием технологических отклонений размеров деталей и взаимного расположения элементов. Например непа- раллальность расглиренного конца среднего стержня и основания магнитопро- нода приводит к неплоскостности воздушного зазора, что влечет за собой непостоянство градиента магнитного гтотока в этом основании и искажает выходную характеристику преобразования. Несимметричность расположения секций вторичной обмотки относительно магнитной нейтрали датчика приводит к неполной компенсации влияния 1П)лей выпучивания, что также вызывает появление нелинейности. Вероят- Hhii характер технологических отклонений определяет случайные значения величины остаточной нелинейности эк- земляров датчиков, изготовленных по одним чертежам, что ограничивает область их использования и вынуждает снижать класс точности измерительных устройств в целом, особенно предназначенных для многоканальных измерений.
Таким образом, изобретение позволяет повысить точность датчика.
изобретения
Формул
Датчик перемещений по авт. св. № 1195179, отличающийся тем, что, с целью повышения точности путем компенсации нелинейности выходной характеристики преобразования, он снабжен установленным в направляющих с возможностью поворота вокруг его продольной оси вторым штоком цилиндрической формы, ось которого параллельна оси первого штока, а торцовая плоскость, контактирующая с концом перво- I o штока, выполненным сферическим, расположена неперпендикулярно к его оси.
10
3
7V
f6
15
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик линейных перемещений | 1984 |
|
SU1180677A2 |
| Устройство для определения положения границы двух диэлектрических сред в сосуде | 1986 |
|
SU1527505A1 |
| Механизм преобразования прямолинейного движения | 1983 |
|
SU1155810A1 |
| ДАТЧИК ДАВЛЕНИЯ | 1973 |
|
SU384032A1 |
| Автоматический регулятор резонанс-НОгО СОСТОяНия КОНТуРА НулЕВОйпОСлЕдОВАТЕльНОСТи СЕТи | 1979 |
|
SU813585A1 |
| Динамометр | 1977 |
|
SU690332A1 |
| Устройство для исследования грунта забоя скважины | 1987 |
|
SU1625980A1 |
| Устройство для линеаризации нелинейных характеристик | 1981 |
|
SU964659A1 |
| Устройство для взвешивания мульд | 1978 |
|
SU744238A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1985 |
|
SU1381445A1 |
Изобретение относится к контрольно-измерительной технике. Целью изобретения является и.шьацение точности датчика нереглещений путем компенсации нелинейности характеристики преобразования. Для этого в корпусе датчика установлены направляющие 14, в которых перемещается второй шток 15 цилиндрической формы, контактирующий с первым штоком 13 датчика торцом, плоскость которого расположена неперпендикулярно к его оси. Этот шток установлен с возможностью вращения вокруг его продольной оси, благодаря чему изменяется положение его торцовой плоскости, с которой контактирует сферический конец первого штока, связанного с подвижной частью датчика. В результате перемещение штока 15 приводит к смещению конца штока 13, скользящего по торцовой плоскости 19 штока 15 в направлении, ортогональном к направлению измеряемых перемещений. Это обуславливает нелинейное преобразование измеряемых перемещений в перемещение поднижно11 части датчика. Величина и знак нелинейности регулируются величингп и знаком наклона торцовой п:тоскости штока 15 к его оси и выбираются соответствующими нелинейности выходной статической харак еристики преобразования датчика, обеспечивая ее компенсацию. 3 ил. с & (Л 16 со со 4 14) 18 5 Фиг.г.
Заказ 4635/41Тира 6/6Подписное
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, А
| Датчик перемещений | 1984 |
|
SU1195179A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
