со 00
4
сл
.-. J
9игГ
Изобретение относится к устройствам для управления движением динамических объектов, а именно объектов с присоединенными упругими элементами.
Цель изобретения - повышение точности управления присоединением упругим элементом
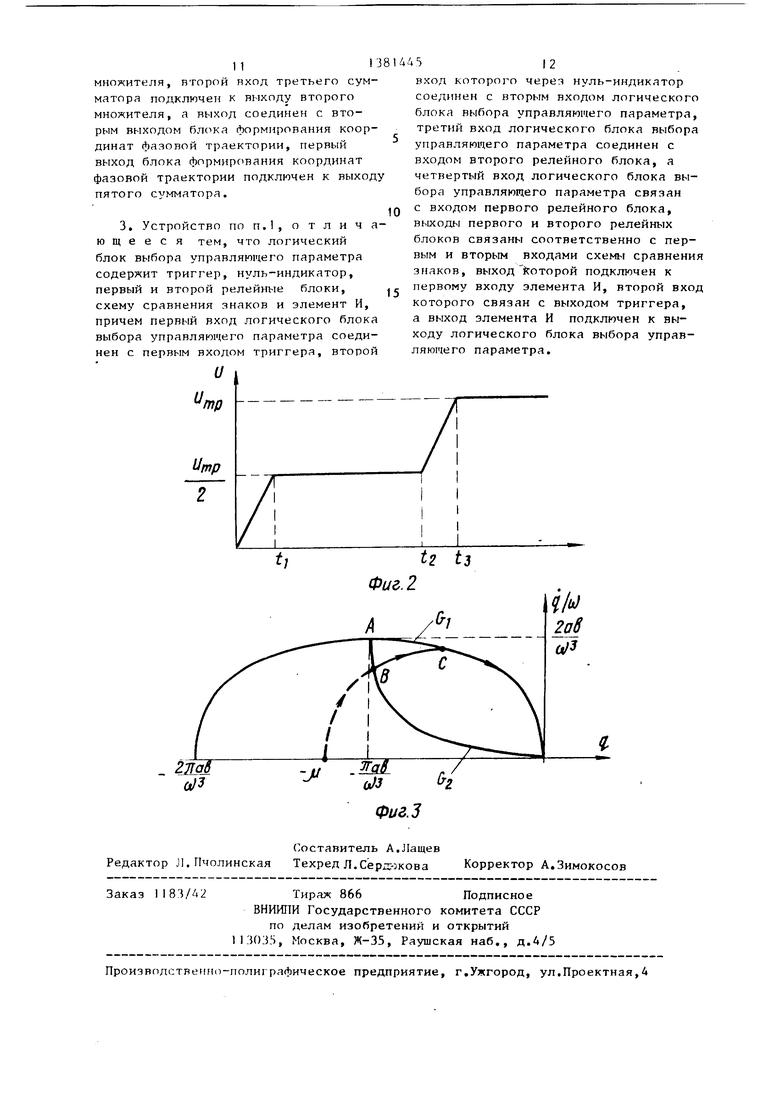
На фиг. представлена функциональная схема устройства для оптимального управления работой инерционного исполнительного органа объекта с присоединенным упругим элементом; на фиг.2 - график изменения нагрухающеto
где I - момент инерции объекта относительно оси вращения, кгс- с ;
угол поворота объекта, соответственно y(t) - угловое ускорение, с ; обобщенная координата осциллятора (например, величина отклонения на конце), м, соответственно q(t) в м/с ; коэффициент взаимовлияния твердого тела и упругого .
y(t:
q(t) g элемента кг- с
г.
го воздействия известного устройства; is M,,(t) - управляю1 щй момент (воздействие), КГ с, n - приведенная масса упругого
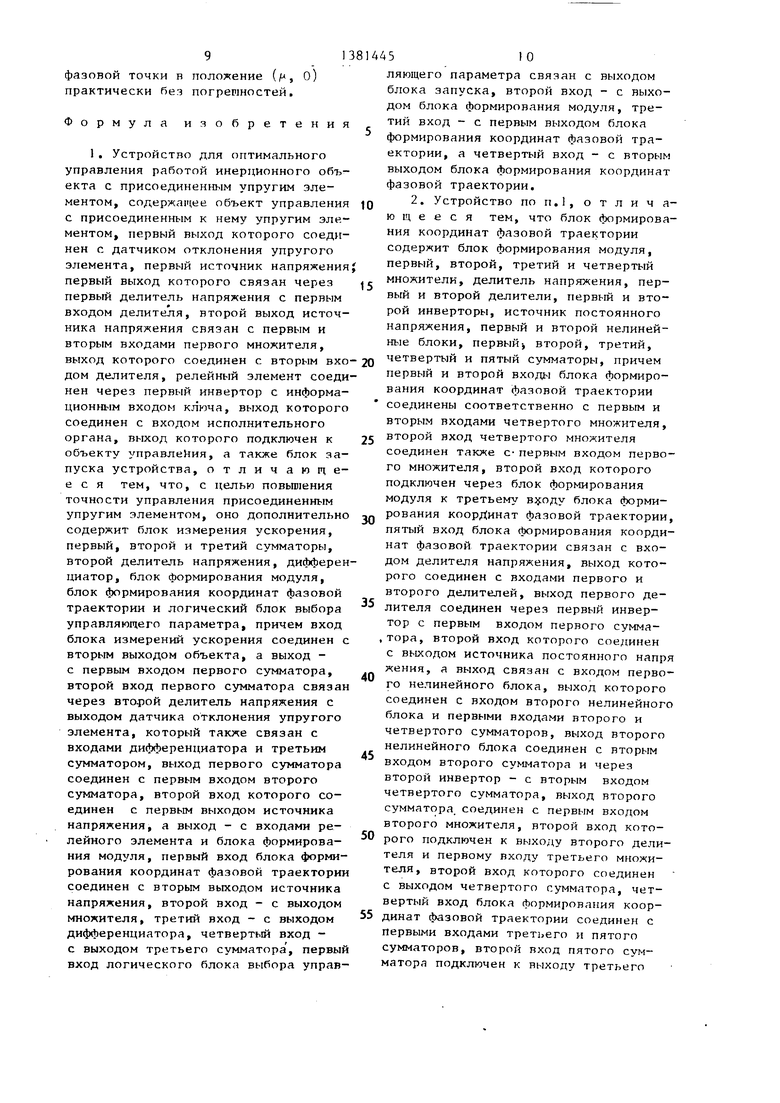
на фиг.З - траектория движения на фазовой плоскости.
Устройство содержит объект 1 управления, присоединенный упругий элемент ., блок 3 исполнительных органов, блок 4 источников постоянных напряжений, делитель 5 напряжения, делитель 6, множитель 7, блок 8 формирования координат фазовой траектории, логически блок 9 выбора управляющего параметра, блок 10 запуска, релейный элемент 11, ключ 12. датчик 13 отклонения, второй делитель 14 напряжения, дифференциатор 15, третий сумматор 16, блок 17 измерителей ускорений, первый 18 и второй 19 сумматоры, инвертор 20 и блок 21 формирования модуля.
Блок формирования координат фазовой траектории образуют блок 22 формирования модуля, первый 23 и четвертый 24 множители, делитель 25 напряжения, первый 26 и второй 27 делители, первый инвертор 28, первый сумматор 29, блок 30 постоянного напряжения, первьп 31 и второй 32 нелинейные блоки, второй множитель 33, второй сумматор 34, второй инвертор 35, четвертый сумматор 36, третий множитель 37, третий 38 и пятый 39 сумматоры.
Логический блок содержит триггер 40, нуль-индикатор 41, второй релейный блок 42, первый релейный блок 43 схему 44 сравнения знаков и элемент И 45.
Плоское угловое движение жесткого тела с присоединенным слабодемпфированным упругим элементом в первом приближении может быть описано следующей системой дифференциальных урав- нений:
ly(t) - -Rg(t) + Mv(t); in(q(t) 4.u)q(t) -ey(t). ,
ПУ1 ,
где I - момент инерции объекта относительно оси вращения, кгс- с ;
угол поворота объекта, соответственно y(t) - угловое ускорение, с ; обобщенная координата осциллятора (например, величина отклонения на конце), м, соответственно q(t) в м/с ; коэффициент взаимовлияния твердого тела и упругого .
y(t:
q(t) g элемента кг- с
г.
M,,(t) - управляю1 щй момент (воздействие), КГ с, n - приведенная масса упругого
элемента, кг -с /м, cup - собственнАя частота колебаний упругого элемента, . Рещая систему (1) относительно у, получают
1
Mv(t)
- g(t) ..,(2)
(I - Sn
(I - -) m
Введя обозначения -
- - -- ;
I - v(t)
I §1
получают
y(t) (t) + v(t;
где v(t) - управляющее ускорение, с ;
ol - коэффициент, м
-7
40
Подставляя выражение (З) во второе уравнение системы (1), получают
q(t) -(u),§)g(t) -f v(t).
;4)
Введя обозначения uJ
u)
Sff. n
Ъ - S, m
получают
q(t} - a) g(t) + hv(t) (5) Величина v{t) изменяется как
v(t) aU(f,)
е ,l - управляющий параметр;
MOMC Sign(U-v(t)) - параметр,
ограничивающий скорость изменения управляющего ускорения;
и - требуемое устанонивп е- еся значение управляющего ускорения.
При этом состояние осциллятора (5 с минимально полной энергией (потен- циально и кинетической) , соответст- требуемому установившемуся значен 1Ю управляю чего ускорения U определяется точкой ( /х, о) на фазовой плоскости (q, q/w), где f 8U/w.
Задача оптимального времени управления скоростью изменения нагруокаю- щего воздействия может быть сформирована как необходимость оптимального по времени перевода объекта (1) из состояния q(0) ч v(0) U в состояние q(ti) jU ; q(tj - 0; v(t,) и с использованием огра 1иченного по величине управления ,lj, Задача нагрухения рассматриваемого объекта с коэффициентом динамичности, равным единице (перевод в точку динами- ческого равновесия), для случая инерционного исполнительного органа рассмотрена в l. При этом рассчитывались моменты времени t, t, tj, в которые происходит переключение управления (фиг.З). Па интервале О, ti управление возрастает от О до
и и
jTp/2, затем на участке t i, 2 U
тр
/2, на участке tt ,, t управление вновь возрастает до наконец
7 t
- Т,/2 V и,.
Однако
при .. / 1. 3 .. D/ ,. V - p
использование такого алгоритма для управления реальным объектом при наличии внешних возму1чений и инерционности исполнительных органов не всегда приводит к необходимым результатам Значительно характеристиками обладает алгоритм управления в форме обратной связи. Если обозначить х q-|t., , система (1) принимает вид
X Ах + V,(7)
где X X
1
X
v
о, О, аи};
-ы
1 О
п
ъ
x.(t
аъес-
Ы(lot - sinu)t) +
и ее необходимо перевести из состояния х (0) qo - |U , То. 0 - в состояние х (t J О, О, 0}.
Структуру t-оптимального управления объектом (7) получают из условия максимума функции Гамильтона H(S, р, и)
max 1
-, ,
1, X , + lyj (.
+ if, aU,
bx,) +
(8)
v l
4 j, V}} - вектор сопряжения перемен ных, удовлетворяющих каноническим соотношениям;
-А Ч .
Из анализа условия сать
и It s . (8)
можно запигде
г 1, ь{„.
а V
0;
rj , (9)
а Vj : 0.
При синтезе оптимального управления используют качественный анализ поведения решений уравнения (2) с учетом условия (А), из которого следует, что оптимальное управление принимает только свои граничные значения. В соответствии с теоремой об п-интервалах, справедливой в данном случае, структура оптимального управления имеет вид fl, О, 1} с обнулением параметра U в момент t,.
Решение систека- (7) может быть получено в виде
X ,(t)C ,GOSW t+C jsir( t+C +
ab (9 Г-
и
t;
x (t)-C,wsinu)t+CjWcosu;
C, j
) +
(д)
X3(t)CjiA)Vb+a ,
(10) e 1,3 - некоторые постоянные
коэффициенты, определяемые граничными условиями задачи.
Рассмотрим случай q, q 0. При этом , 9f-J/ы, С, b(vj-U)/(iJ , а система (Ю) принимает вид:
Ъ(УО - и)
о)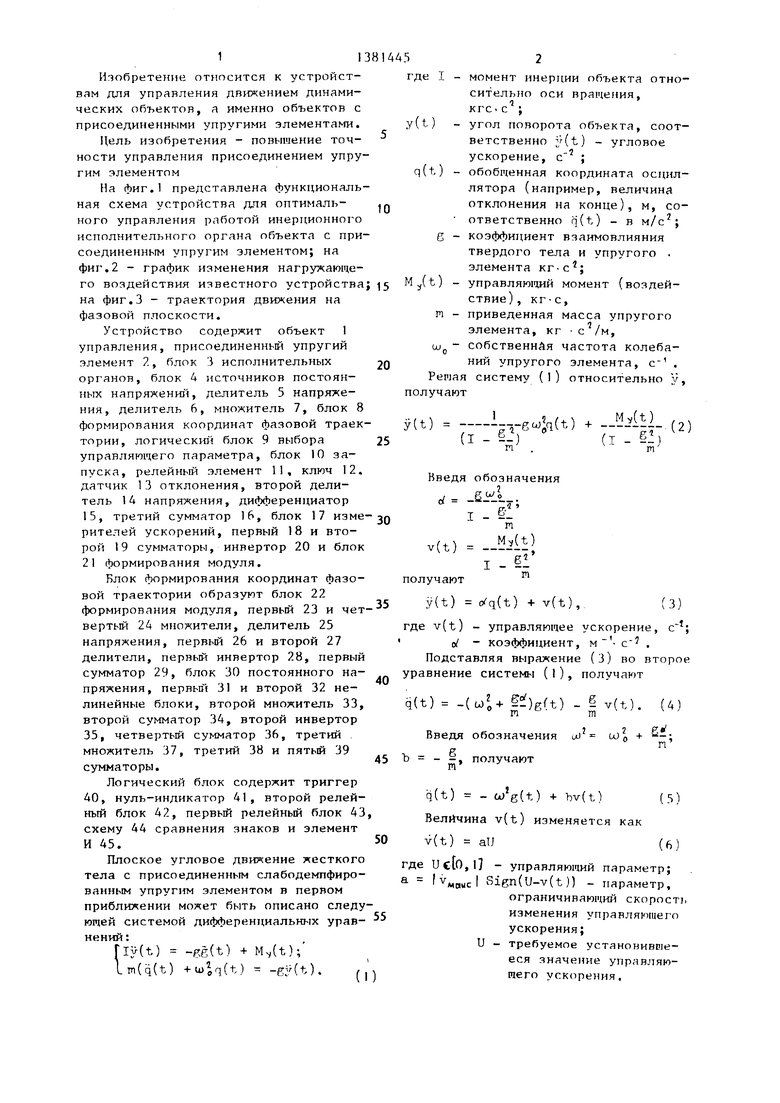

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1989 |
|
SU1659981A2 |
| Система терминального управления упругим объектом | 1987 |
|
SU1434403A1 |
| Система стабилизации объекта с присоединенным упругим элементом переменной жесткости | 1988 |
|
SU1603340A1 |
| Адаптивное устройство для гашения колебаний упругого элемента переменной жесткости | 1989 |
|
SU1596306A1 |
| Система управления объектом с присоединенным упругодеформируемым элементом | 1986 |
|
SU1403015A1 |
| УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ ВИБРАЦИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2005 |
|
RU2291334C1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2001 |
|
RU2192035C1 |
| Система стабилизации объекта с присоединенным упругим элементом | 1988 |
|
SU1525676A1 |
| Устройство для успокоения колебаний упругого элемента переменной жесткости | 1988 |
|
SU1587465A1 |
| Устройство для успокоения колебаний упругого элемента переменной жесткости | 1987 |
|
SU1500990A2 |
Изобретение относится к области управления движением динамических объектов, состоящих из двух тел, связанных упругой связью. Целью изобретения является повышение точности управления присоединенным упругим элементом. Устройство содержит объект управления 1, присоединенный упругий элемент 2, блок исполнительных органов 3, блок источников постоянных напряжений 4, делитель напряжения 5, делитель 6, множитель 7, блок формирования координат фазовой траектории 8, логический блок выбора управляющего параметра 9, бл ок запуска 10, релейный элемент 11, ключ 12, датчик отклонения упругого элемента 13, второй делитель напряжения 14, дифференциатор 15, третий сумматор 16, блок измерителей ускорений 17, первый сумматор 18, второй сумматор 19, инвертор 20 и блок формирования модуля 21. 2 з.п. ф-лы, 3 ил. (Л
x,(t) аЪ et - (cjt - cosuit)/i4) x(t) (v - и) + a t.
(И)
Таким об1)лчом, при рассмотрении систем - (П) видно, что первые два уравнения нри 9t-J 1 описывают на фазовой плоскости (х, )) циклоиду (см. фиг.З), начинающуюся в точке (b(v5-U)). При е М П система (П) описывает окружность с центром в точке (ъ( v -U+at ) / w ,п). Наиболее характерные участки траек- тории показывают, что структура управления вырождается в ll при любом , t , J (управление осуществляется без переключения). В случае I 2ТГ|а)/и. Во всех остальных случаях требуется не менее двух переключений: с начальной циклоиды на дугу окружности и с окружности на отрезок циклоиды, проходящей через на
1 + 5 с
I u)5
аЪ . to(u - vj аЪ
sinт;2а
VoJ аЪ , -
При изменении U от v до 2f/a/tu точка В движется по отрезку циклоиды от начала координат к точке А с координата; и (, 2ab/u)), а точка С - по отрезку перевернутой циклоиды проходя1чей через начало координат и точку А.
Кривые G , О, О, О при этом могут быть записаны в виде
а.Ъ f-, (X ., X, , со ) X + -- { д - sin Д ;
т1 ц}Э L
аЪ
Г,,(х, X, , U)) X, + -- t + sin; ,
tu
, ,1X7 lOJ
где arccos ( 1- I3iD
В полученных соотногаениях учтена возможность движения изображающей точки в разных полуплоскостях фазовой плоскости при изменении знака параметра а (направления изменения нагруж ающей силы),
г„ Zlalbi Поскольку при 1х |е 1.0, -(7) sin О при любых Х(), TTj , то несложно установить, что область фазовой плоскости, заключенная между кривыми Гт ( -) О и Гт 5( 0 0 харак- 1 теризуется условием signCTi, G,) 1 / sipn() 1, я для случая |и - д I оптимальное управление в форме обратной связи может быть представлено в виде
и 1- 0 r,((, -Cj) -iVlv - TjL
(12)
Q.14456
чало координат фазочон плоскости. Оптимальная траектория является единственной и симметричной относительно линии
b(v, - и)
w
ГГРешая совместно уравнения окружности с центром в точке (l;(v - ll)/ /2w, о) и циклоид, начинаю1тихся в точках tb(v - ;)/w , 0) и ( о) соответственно, находят координаты точек переключения управления
-ЬЕЬ.„(--,).
COS
аЪ
аЪ, -U
cos
UJ(U - vo),
- vo),l 2a 1
5
0
0 5
5
0
5
Алгоритм управления выглядит сле- дyюlI J м образом,
В начальный момент времени к объ- ер;ту прикладывается постоянное управляющее ускорение U. Фазовая точка плоскости (х,, X /w), отображающая поведение упругого элемента начинает двигаться по -отрезку циклоиды с U 1, до точки переключения управления С. Затем происходит переключение управления и фазовая точка движется по дуге OKp wHOCTH с U О, так как после точки переключения sip;n( . , ) -1, до-второй точки в переключения управления. В ней вновь происходит , переключение и фазовая точка вновь движется по отрезку циклоиды с 1J 1 до прихода в конечную точку ((U, 0).
Таким образом, условием переключения управления является изменение si6n( Пj). Аналогично производится этап разгружения.
Алгоритм (2) реализуется npe;uiara- емым устройством следуюпц1М образом.
Текущие значения обобщенной координаты колебаний упругого злемента q(t) снимаются с датчика 13 отклонения, а значение q(t) формируется на выходе дифференцирующего элемента 15. Значение х , q - /ч формируется па . выходе третьего сумматора 16 с использованием множителя 7, на выходе которого формируется W , и делителя 6, формирую11его (U Ъ 1/u (h - коэффициент передачи делителя 5 напряжения). Знак разности меж;1у требуемой и
теку1цей вн.чичшыми H,4rp A;iio i;er4i ncn- действня .-:if4;( -- v) формируется на ныходе перпого niiru iirnpa с iioMoinijKi релейного элемента 1 I , первого тора 18, формируницего v - - - - сУ ;. Данное вь-фажение для текущей величины нагружакяцего воздействия получено ия упрощенного уравнения днижения жесткой конструкции обт.екта управления
у + V
где у - сигнал, снимаемьй с блока 17 измерения ускорения;
((У)- коэффициент гтередачи второго делителя 14 напря ения и второго сумматора 19. Значение функцш 1 ( / и . ) формируется на выходах блока В форми- рования координат фазовой траектории,
. ; . : ., при этом л fii ccorii, 1 --,,/ формируется на выходе второго нелинейного элемента 52. Значения управляю- щего параметра U формируются на выходе логического П.тока выбора управляющего параметра Ч, при чем функцию формирует схема Д4 сравнения знаков
сигналов.
Предлагаемое устройство работает следую цим образом.
Предположим, что объект управления совершает движение, У111;угий элемент 2 совертчает кoлcбaтeлJJHыe движения , с его выхода с помощью датчик 13 отклонения снимается величина обобщенной координаты отклонения упругого элемента от положения равновесия ;(t.p; и после дифференцирова- ния п( д)- (- выхода объекта управления с помощью блока 17 измерителей ускорений снимается линейное ускорение объекта у.
При необходимости сообщения объек ту управления с присоедине1П1ЫМИ упругим элементом ускорения включают блок запуска, Разреиаюгшй сигнал устанавливает в единичное состояние триггер 40 (рг13ре111ающий сигнал поступает на второй вход элемента И 45). На первом вьгходе блока источником постоянных напряжений 4 формируется сигнал (i- -v,), который поступает на второй cyMM. iTOj) 19, На выходе сумматора фо 1мируется разность, а после прохожде)1ия через релейньЕЙ элемент II и инвегг;ор 20, на выходе последнего формируется nirnCv - и).
|Q
Q
5
0
5
Вместе с тем ))а выходе формирующего блока формируются функции , и Hj. Их знаки Rif n (1 и ял гг. ; цос1унают на входд-г схемы 44 сравнения знакон, с выхода кото1юй подается на первый вход элемента И 45 значение управляю1це1 о параметра (в neji- вой части и 1), Схему сравнения знаков сигналов можно считать стандартным элементом, поскольку она может быть легко реализована с использованием элементов И, 11 1И-НК и ИЛИ, причем оба ее входа одновреме1т- но подключены к соответствующем входам первых двух элементов, выходы которых образуют входы элемента Ш1И, а его выход является выходом схем1-1. Сигнал с выхода элемента И открывает ключ 12, через который на выход исполнительного органа 3 подается значение sign(U - v). С началом работы исполнительного органа 3 упругий элемент начинает отклоняться от своего первоначального положения, а на выходах датчика 13 отклонения и дифферешшрующего элемента 15 формируются сигналы n(t) и q(t), которые используются для формирования v и U. В момент t, времени sifin П у I l тогда сигнал на рыходе элемента И равен О, ключ 12 закрывается, исполнительный орган 3 прекращает изменять свою мощность (тягу). На фазовой траектории этот момент соответствует ( ) I-, после которой движение фазовой точки осуществляется по дуге окружности с и О, т.е, с V const. Наконец по условию (0i- 7) вновь и 1, вновь открывается ключ 12 и исполнительный орган пр()должает изменять режим своей работы (увеличивает или уменьшает мощность), «базовая точка продолжает движение с U 1 по отрезку циклоиды к положению равновесия, В течение всего перехода процесса значение разности v - U меняется, наконец при v - U О (положение динамического равновесия.) срабатывает нуль-индикатор 41, сигнал с выхода которого переводит триггер 40 в нулевое состояние. Устройство отключается и для повторного пуска необходимо вновь включить блок И) запуска.
Таким образом, предлагаемое устройство обеспечивает устойчивость к разбросам динамических параметров объекта и исполнительных органов. Кроме то/ о, оно обеспечивает переход
фазовой точки в положение (р, О) практически без погрешностей.
Формула изобретения
1, Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом, содержащее объект управления с присоединенным к нему упругим элементом, первый выход которого соединен с датчиком отклонения упругого элемента, первый источник напряженияJ
первый выход которого связан через первый делитель напряжения с первым входом делителя, второй выход источника напряжения связан с первым и вторым входами первого множителя.
15
множители, делитель напряжения, первый и второй делители, первый и второй инверторы, источник постоянного напряжения, первый и второй нелинейные блоки, первый) второй, третий.
выход которого соединен с вторым вхо-20 четвертый и пятый сумматоры, причем
первый и второй входы блока формирования координат фазовой траектории соединены соответственно с первым и вторым входами четвертого множителя, второй вход четвертого множителя соединен также с- первым входом перво го множителя, второй вход которого подключен через блок формирования модуля к третьему блока формирования координат фаяовой траектории пятый вход блока формирования коорди нат фазовой траектории связан с входом делителя напряжения, выход которого соединен с входами первого и второго делителей, выход первого делителя соединен через первый инвертор с первым входом первого сумматора, второй вход которого соединен с выходом источника постоянного напр жения, а выход связан с входом перво го нелинейного блока, выход которого соединен с входом второго нелинейног блока и первыми входами второго и четвертого сумматоров, выход второго нелинейного блока соединен с вторым входом второго сумматора и через второй инвертор - с вторым входом четвертого сумматора, выход второго сумматора соединен с первым входом второго множителя, второй вход которого подключен к выходу второго дели теля и первому входу третьего множителя, второй вход которого соединен с выходом четвертого сумматора, четвертый вход блока формирования коор- 55 динат фазовой траектории соединен с первыми входами третьего и пятого сумматоров, второй вход пятого сумматора подключен к выходу третьего
дом делителя, релейный элемент соединен через первый инвертор с информационным входом ключа, выход которого соединен с входом исполнительного органа, выход которого подключен к объекту управления, а также блок запуска устройства, отличающееся тем, что, с целью повышения точности управления присоединенным упругим элементом, оно дополнительно содержит блок измерения ускорения, первый, второй и третий сумматоры, второй делитель напряжения, дифференциатор, блок формирования модуля, блок формирования координат фазовой траектории и логический блок выбора управляющего параметра, причем вход блока измерений ускорения соединен с вторым выходом объекта, а выход - с первым входом первого сумматора, второй вход первого сумматора связан через втарой делитель напряжения с выходом датчика отклонения упругого элемента, который также связан с входами дифференциатора и третьим сумматором, выход первого сумматора соединен с первым входом второго сумматора, второй вход которого соединен с первым выходом источника напряжения, а выход - с входами релейного элемента и блока формирования модуля, первый вход блока формирования координат фазовой траектории соединен с вторым выходом источника напряжения, второй вход - с выходом множителя, третий вход - с выходом дифференциатора, четвертый вход - с выходом третьего сумматора, первый вход логического блока выбора управ
8144510
ляющего параметра связан с выходом блока запуска, второй вход - с выходом блока формирования модуля, третий вход - с первым выходом блока формирования координат фазовой траектории, а четвертый вход - с вторым выходом блока формирования координат фазовой траектории.
10
множители, делитель напряжения, первый и второй делители, первый и второй инверторы, источник постоянного напряжения, первый и второй нелинейные блоки, первый) второй, третий.
четвертый и пятый сумматоры, причем
первый и второй входы блока формирования координат фазовой траектории соединены соответственно с первым и вторым входами четвертого множителя, второй вход четвертого множителя соединен также с- первым входом первого множителя, второй вход которого подключен через блок формирования модуля к третьему блока формирования координат фаяовой траектории, пятый вход блока формирования координат фазовой траектории связан с входом делителя напряжения, выход которого соединен с входами первого и второго делителей, выход первого делителя соединен через первый инвертор с первым входом первого сумматора, второй вход которого соединен с выходом источника постоянного напря жения, а выход связан с входом первого нелинейного блока, выход которого соединен с входом второго нелинейного блока и первыми входами второго и четвертого сумматоров, выход второго нелинейного блока соединен с вторым входом второго сумматора и через второй инвертор - с вторым входом четвертого сумматора, выход второго сумматора соединен с первым входом второго множителя, второй вход которого подключен к выходу второго делителя и первому входу третьего множителя, второй вход которого соединен с выходом четвертого сумматора, четвертый вход блока формирования коор- динат фазовой траектории соединен с первыми входами третьего и пятого сумматоров, второй вход пятого сумматора подключен к выходу третьего
,11381
множителя, второй вход третьего сумматора подключен к выходу второго множителя, а выход соединен с вторым выходом блока формирования коор- динат фазовой траектории, первый выход блока формирования координат фазовой траектории подключен к выходу пятого сумматора.
10
Составитель А.Лащев Редактор Л. Пчолинская Техред Л.Серд;-жова Корректор А.Зимокосов
512
вход которого через нуль-индикатор соединен с вторым входом логического блока Bbifiopa управляющего параметра, третий вход логического блока выбора управляющего параметра соединен с входом второго релейного блока, а четвертый вход логического блока выбора управляющего параметра связан с входом первого релейного блока, выходы первого и второго релейных блоков связаны соответственно с первым и вторьм входами схемы сравнения знаков, выход Которой подклмчен к первому входу элемента И, второй вход которого связан с выходом триггера, а выход элемента И подключен к выходу логического блока выбора управляющего параметра.
1ь) 2ав
Фиг.З
