по n.l , о т .п и111 и ii с я тем, что, г целью рния не.1зинер1ной тависимости
перемещениями подвижных злг;в, о1:1азую1цие рабочих поверхй но край11(.:й hiepe двух э.чер. - кривые с одинаковь ми знакши;и1})ы .
Механизм по i: t , о т л и ч: а I с ; тем, ччо, с целью улучf-; 10
iiifiiHn о1)иентлции Р П(ЛНн:1С Ых элемент 1ни я лополнителт.ных у с т р о с - т в , р а б о ч и е ментор распо..
.ЗМИЛ. .
ч .Механ1 :и-; ло г
ч а И)щ и и с: .4 т с
бочихттовсрхког.тей
равнг:71)Ом ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания шарниров | 1986 |
|
SU1305572A1 |
| Автоматизированный участок для резки проката | 1985 |
|
SU1625665A1 |
| Сдвигаемое управляющее сопло ракетного двигателя | 2023 |
|
RU2819485C1 |
| Испытательный стенд для формовки трубы из листа конечной длины | 1986 |
|
SU1391752A1 |
| Станок для правки пластин | 1989 |
|
SU1706761A1 |
| Установка для испытаний эластичных материалов при скоростном растяжении | 1990 |
|
SU1744576A1 |
| РОЛИКОВЫЕ КОНЬКИ (ВАРИАНТЫ) | 2004 |
|
RU2301100C2 |
| Способ правки длинномерных изделий | 1990 |
|
SU1761335A1 |
| Приспособление для создания давления к ленточному прессу непрерывного действия | 1974 |
|
SU581851A3 |
| МЕХАНИЗМ ДЛЯ ЗАКРЫВАНИЯ ОКОН И ДВЕРЕЙ | 1999 |
|
RU2180937C1 |

1. МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ с разной скоростью, содержащий корпус, размещенные п нем три элемента, рабочие поверхности которых наклонены к оси, совпадающей с направлением движения, под разными углами, причем один из элементов неподвижен, и роликовые опоры, имеющие каждая по крайней мере два ролика, взаимодейств т()пщх с рабочими поверхностями элементов, о т л и ч а ю щ и йс я тем, что, с целью повьпления KIL1 механизма путем т еньшения трения, ролики установлены на одной оси с юзможностью поворота относительно друг друга. с (О «шаД СП СП 00 7J
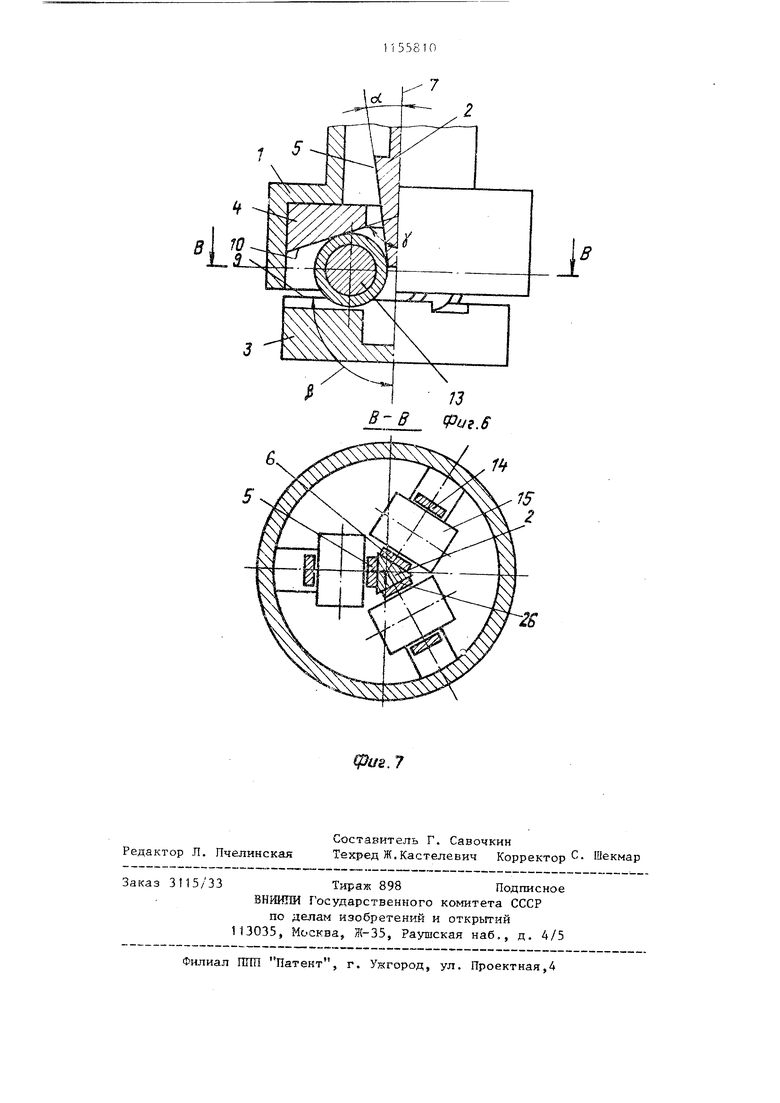
И;и)бретение относится к машиностроению и может бьгпэ использовано н машинах лл передачи поступательного движения с изменением скорости и пкрел.аваемого усилия при сохранении направления движения. Известен механизм преобразования прямолинейного движения с разной Сгсоростыо, содержащий корпус, Ra3 - eii;eiuH i:: s 1;ем три э.иементаэ рабочие noBepx)iOCTH которых наклонены к ося ,с(;нпадающей с направление дги1жел- и.ч, под разными углэ.ми, причем один из элементов неподвижен, и pcjjTMKC 8)e oiropbi, HMerouyie к..я по мЕре два Бза1пчо ,;ей|Tnyiouuix с рабочими noF epxftocTn м:-; злеме(гго. Ролики расположены ,друг над jipyroM и взаимодействуют г. рабочими поверхностями неподг.гжHoio и подвиж 1)1х элемантов l J. Недостатком 5- звестного мexaниз . яв.мястсл наличие трения скольжения меж.;1.у роликами и поверхностями под, ..уго элемента, что приводит к гювь иенг1о 1у износу и снижению К1Щ М(х;и:изма . HejTb изобретения - повышение КШ ме.кг1низма путем уменьн-ения трения. Указа1 ная цель достигается тем, что в механизме преобразсБания прямолинейного движения с разной скоростью, содержащем корпус, размещенные в нем три элемента, рабоч пове{5Х1-юсти которых наклонены к ос совпадаюш,ей с направлением доиженш под разными углами, причем . из элементов неподвижен. и роликовые опоры, имеюшд е каждая по крайней иере два. ролика, взаимодействующих с рабочими иоверхностичи ялемектов ролики уста ювле;ил на (Тгой склг с возможностью поворота OT-I --с.тел ьио друг друга. Кроме того, дчля получения H.-.IHнейной зависимости между г:о15еме цениями подвиж1- ых элементов с сохранением неизменнг 1м сосггношения между уг;тами образ;-то1и:Ие 1 оверхн(..сгей по Мире .Tnv:-: э.псмс-н-тов - KjniB.if: г о;:и)п AOPhiMH чгл-ами КрИВИЗНЬ , /1ЛЯ ИЯ ОРИС.:,:;- Г: пространстве подвижных злемсктоп без - спольз1- наиия доголиите. :ьим Н;1ПравЛЯЮ1 и Х устрой : { рлбг.-;, lioверхкости aJCMeKTG: pacifi :с;: м; i no граняь; upaBfLn.ihiy ;iHp.-;: . Л)Оме roio 4;iC.o раб,1ч-;-- ccTti}--иосте ; K-iKinrn элс-;г-: ; a MC/JV-T б-гг;, равно т ем . На фиг. изоСрчжс-;: мех,-низ:-:, разрез вдоль ос:--;; лл фиг /. .рез А-Л ня фи Г , 1 ; ия ;;-с, i - ,1Лрез К-Н па ibiu-.l:, iv 6иг.;-Ь варианты .а;е::;-;я г-кхани/ ма , :. фиг. 7 - разре --lj i-a фи1.6. Механизм состоит из с рчусл : , 3, которС1Ч ус vaiiOiCi;;. fn.i ДК1 ;ь)Д;ижнь:х элемента 2 i 3 li закреш ем 1С; Г1Движиый злемечт 4. К-злпи/гны;- -:смеят 2 выдоднен ь с р Сочимк 1к;верх и1стями 5 и Ь П::ьер- Ь-н-ти 5 и 6 распо;тожены CH--iNU jM 4Ho оси ; uori; углом :х . П;Ч1р1:)й подвиж-л :;: -се-мент 3 HMOev рабо-нс В и 9, также pacii/nccKeiiiibie с;;:-г-1ем pt: Г:) оси под угчим , Ноиодни . ;емент 4 имеет рабочие- иоЬр :1- Сг: 1 и 11, pacnOJhi KOn;ii, г.-; ;,,;, с льмо оси 7 под углом Меж,ЦУ ГЮДВИЖ Ь М и нелюдвижными элементами симметрич но оси 7 ycTanoBJreHbi подвижные рол iкoвыe опоры 12 и 13. Каждая опора 12 и 13 имеет по крайней мере два ролика 14 и 15 (фиг. 2 и 3). Ролики установлены на одной оси с возможностью поворота относительно друг друга. Между poJIикa Ги 14 и 15 установлены подшипники .J, Ролик 1ч кон тактирует с рабочими поверхностями подвижного 2 и неподвижного 4 элементов. Ролик 15 может быть выполнек из двух частей, контактируизп;их с рабочими поверхностями подвижного элемента 3. Части ролика 15 располо жены симметрично относительно средней плоскости 17, перпендикулярной оси 18 опоры. Угол Сэ между рабочей поверхностью 10 или 11 неподвижного элемента и нормалью 19 к оси 7 клина равен удвоенному углу cL. Стрел ка 20 покаэьшает направление действия усилия. Для обеспечения реверсивного движения рабочие поверхности 10 и 11 неподвижного элемента 4 расположены ближе к вершине клина 21 (фиг.4), чем рабочие поверхности 8 и 9 второго подвижного элемента 3. В механизме, изображенном на фиг.5, рабочие поверхности 5 и 6 подвижного элемента 2,а также 10 и 11 неподвижного элемента 4 выполнены криволинейными с одинаковьп и знаками кривизны, т.е. они обе вогн тые или обе выпуклые. В каждом положении опоры угол с между каса 22 к образующей рабочей поверхности 5 подвижного элемента в точке 23 контакта с роликами 14 опоры 12 и осью 7 подвижного эле;чента 2 вдвое меньше угла 6 между касательной 24 к образующей рабоче поверхности 10 неподвижного элемекта 4 в точке 25 контакта с роликом 14 и нормалью 19 к оси 7 элемента т.е. 04 В механизме, изображенном на фиг. 6, подвижный элемент 2 выполнен в виде правильной с тремя рабочими поверхностями 5,6 и 26,второй подвижный элемент 3 и неподвижный 4 имеют по три рабочие поверхности, которые расположены по граням пирамиды. Между рабочими поверхностями расположены три роликовые опоры. Таким образом, все боковые усилия, действующие на подвижные элементы 2 и 3, уравновешиваются без каких-либо дополнительных направляющих. Механизм работает следующим образом. При перемещении подвижного элемента 2 вдоль оси 7 в направлении, показанном стрелкой 20, усилие, приложенное к элементу 2, передается через ролики 14 и 15 на второй подвижный элемент 3, который перемещается с иной скоростью и другим усилием вдоль той же оси 7 в том же направлении или, как в механизме по фиг.4,в обратном. Усилие реакции, передаваемое через ролики 14, воспринимается неподвижным элементом 4. Механизм преобразует прямолинейное движение вдоль заданной оси с изменением скорости и усилия. Зависимость меткду перемещениями может быть линейная или нелинейная , Использование роликов, установленных на одной оси с возможностью поворота относительно друг друга, позволяет искл1оч1{ть трение скольжения между подвижным лементо(-1 и роликами, следовательно увеличить КПД механизма, а также расширить функциональные возможности механизма путем получения нелинейных зависимостей перемеценияьш подиижньп элементов ,
фиг. 2:
1 JL. ,
VJUB. 4
f
Фиё.,
г 1
i
, . in-- , i /
|.;.C... I L.l:.U,- «-. : lY:-.ЛА
t .-H.j..-A ,.
Й
I
/13
Jig
r4 , .
хйж-:: r-v-:.
/ З/хКЧ ДЧ X K, j , . ч . . i -I
« .:;1-.,ТU« ч . - j-. -. . . ui-j
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
