Фиг.1
Изобретение относится к тормозному управлению транспортнымц средствами.
Цель изобретения - повьпиение на- дежности.
На фиг. 1 изображена блок-схема первого варианта измерительного преобразователя; на фиг. 2 - блок-схема второго варианта измерительного пре- образоватёля.
Измерительный преобразователь по первому варианту (фиг. 1), содержит измеряющий скорость колеса 1 тахо- генератор 2, выход которого подключен к дифференциатору 3, информационному входу блока 4 памяти и одному входу комоаратора 5, к другому входу которого подключен выход блока 4. Выход дифференциатора 3 через компаратор 6 подключен к одному входу ключа 7, к другому входу которого подключен выход компаратора 5. Выход ключа 7 соединен с управляющим входом блока 4 и с входом модулятора 8 силы тор- можения, на выходе которого установлен датчик давления, связанный цепями обратной связи с.входом генератора 9 опорного сигнала, подключенного к входу компаратора 6, и к уп- равляющему входу регулируемого резистора 10 в разрядной цепи блока 4, включающей в себя конденсатор 11.
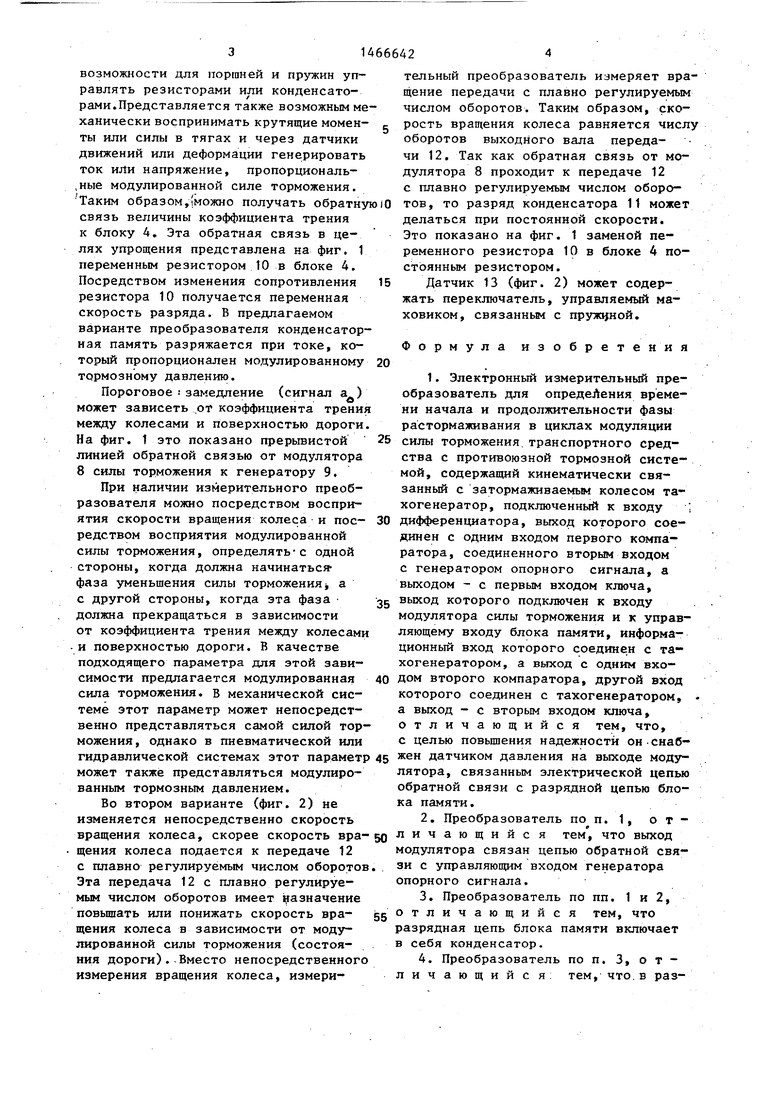
Вариант преобразователя на фиг. 2 отличается отсутствием дифференциа- тора 3, компаратора 6 и генератора 9 и наличием бесступенчатой передачи 12 управляющий вход которой соединен це- пью обратной связи с выходом модулятора 8 и наличием датчика 13 предель- ного замедления.
Тахогенератор 2 обеспечивает вьща- чу сигнала w(t) , который некоторьм образом представляет скорость вращения колеса 1.
Сигнал w(t) приводится к дифферей- циатору 3, который, в свою очередь, выдает сигнал a(t), соответствующий производной скорости по времени, т.е ускорению.
Выходной сигнал a(t) от дифференциатора 3 подается к одному входу компаратора 6, на второй вход которого подается сигнал а от генератора 9 опорного сигнала. Опорный сигнал а представляет пороговое замедление. Когда сигнал a:(t) достигает равенства с пороговым значением сигнала а, выход компаратора 6 активируется к логическому уровню 1 для того, чтобы начинать фазу уменьшения силы торможения.
Выходной сигнал w(t) от тахогене- ратора 2 подается к блоку 4 памяти, который запоминает мгновенное значение скорости. Момент времени t представляет момент времени, когда сигнал ускорения a(t) достигает равенства с пороговой величиной сигнал а и компаратор 6 дает на выходе логический сигнал 1, блок 4 управляется выходным сигналом от компаратора 6, чтобы делать отсечку сигнала подаваемого к блоку 4, так что тепер сигнал скорости w(t) будет запоминаться в блоке 4. Другими словами блок 4 производит выборку сигнала wCg.
Выходной сигнал от компаратора 6 запускает (отпирает) ключ 7, наприме полевой (канальный, ун полярный) транзистор или биполярный тpaнзиd- тор, который, превращаясь в средство управления, активирует модулятор 8 силы торможения во время фазы уменьшения силы торможения. Длительность фазы уменьшения силь торможения определяется периодрн времени, которое требуется для колеса, чтобы восстановиться до приемлемой скорости. Напряжение, накопленное в конденсаторе 11, которое представляет скорость - сигнал w(t), разряжается через резистор 10 подходящей величины.
Выходной сигнал от блока 4 подается к второму .компаратору 5 и срав;- нивается с сигналом скорости w(t) от тахогенератора 2. I .
Когда сигнал w(t) тахогенератора достигает величины исходного сигнала (опорного сигнала) компаратор 5 дает на выходе сигнал О, котор1Ый отмв - чает конец фазы уменьшения силы торможения. Этот сигнал О подается к ключу 7, который, в СВО.Ю очередь, управляет, модулятором 8 силы торможения, чтобы прекращать уменьшение силы торможения и блоком 4 так, чтобы входной сигнал w(t) мог снова подаваться к нему.
Испытания показали, что коэффициент трения может представляться модулированной силой торможения. Моду- гарованная сипа торможения может воеприниматься, например обеспечением
возможности для поршней и пружин управлять резисторами или конденсаторами,Представляется также возможным механически воспринимать крутящие моменты или силы в тягах и через датчики движений или деформации гене:рировать ток или напряжение, пропорциональ- ,ные модулированной силе торможения. Таким о6разом,1можно получать обратну связь величины коэффициента трения к блоку 4. Эта обратная связь в це- лях упрощения представлена на фиг. 1 переменным резистором 10 в блоке 4. Посредством изменения сопротивления резистора 10 получается переменная скорость разряда. В предлагаемом варианте преобразователя конденсаторная память разряжается при токе, который пропорционален модулированному тормозному давлению.
Пороговое замедление (сигнал а)
, о
может зависеть .от коэффициента трения между колесами и поверхностью дороги. На фиг. 1 это показано прерьгоистой линией обратной связью от модулятора 8 силы торможения к генератору 9.
При наличии измерительного преобразователя можно посредством восприятия скорости вращения колеса и пос- редством восприятия модулированной силы торможения, определять-с одной стороны, когда должна начинаться- фаза уменьшения силы торможенияj а с другой стороны, когда эта фаза должна прекращаться в зависимости от коэффициента трения между колесами - и поверхностью дороги. В качестве подходящего параметра для этой зависимости предлагается модулированная сила торможения, в механической системе этот параметр может непосредственно представляться самой силой торможения, однако в пневматической или гидравлической системах этот параметр может также представляться модулированным тормозным давлением.
Во втором варианте (фиг. 2) не изменяется непосредственно скорость вращения колеса, скорее скорость вра- щения колеса подается к передаче 12 с плавно регулируемым числом оборотов Эта передача 12 с плавно регулируемым числом оборотов имеет назначение повышать или понижать скорость вра- щеиия колеса в зависимости от модулированной силы торможения (состояния дороги).,Вместо непосредственного измерения вращения колеса, измерительный преобразователь измеряет вращение передачи с плавно регулируемым числом оборотов. Таким образом, скорость вращения колеса равняется числ оборотов выходного вала передачи 12. Так как обратная связь от модулятора 8 проходит к передаче 12 с плавно регулируемым числом оборотов, то разряд конденсатора 11 может делаться при постоянной скорости. Это показано на фиг. 1 заменой переменного резистора 10 в блоке 4 постоянным резистором.
Датчик 13 (фиг. 2) может содержать переключатель, управляемый маховиком, связанньм с пружцной.
Формула изобретения
1. Электронный измерительный преобразователь для определения времени начала и продолжительности фазы растормаживания в циклах модуляции силы торможения транспортного средства с противоюзной тормозной системой, содержащий кинематически связанный с затормаживаемьм колесом та- хогенератор, подключенный к входу дифференциатора, выход которого соединен с одним входом первого компаратора, соединенного вторым входом с генератором опорного сигнала, а выходом - с первым входом ключа, выход которого подключен к входу модулятора силы торможения и к управляющему входу блока памяти, информационный вход которого соединен с та- хогенератором, а выход с одним входом второго компаратора, другой вход которого соединен с тахогенератором, а выход - с вторым входом ключа, отличающийся тем, что, с целью повышения надежности он-снабжен датчиком давления на выходе модулятора, связанным электрической цепью обратной связи с разрядной цепью блока памяти.
2.Преобразователь по п. 1, отличающийся тем, что выход модулятора связан цепью обратной связи с управляющим входом генератора опорного сигнала,
3.Преобразователь по пп. 1 и 2, отличающийся тем, что разрядная цепь блока памяти включает в себя конденсатор.
4.Преобразователь по п. 3, отличающийся: тем, что,в разрядной цепи последовательно конде н- сатору включен регулируемый резистор, к управляющему входу которого подключена цепь обратной связи.
5. Электронный измерительный преобразователь для определений времени начала и продолжительности фазы рас- тормаживания в циклах модуляции силы jg торможений транспортного средства с противоюзной тормозной системой, со - держапшй кинематически связанные с затормаживаемым колесом электромеха™ нический инерционный датчик предель- e ного замедления и тахогенератор, при- чем электрический выход датчика соединен с одним входом ключа, выход которого соединен с входом модулятора силы торможения и с управляющим вхо- 0 дом блока памяти, информационный вход которого соединен с тахогенератором, а выход - с одним входом ком паратора, другой вход которого соединен с тахогенератором, а выход - с вторым вхо- 25 дом ключа, отличающийся тем, что, с целью повьшения надежности, он снабжен датчиком давления
на выходе модулятора и бесступенчатой передачей, установленной в кинематической связи затормаживаемого колеса с датчиком предельног о замедления и тахогенератором, а датчик давления цепью обратной связи coeд нен с управляющим входом бесступенчатой передачи. I
6.Преобразователь по п. 5, отличающийся тем, что разрядная цепь блока памяти включает в себя конденсатор,
7.Преобразователь по п. 6, о т личающийся тем, что в разрядной цепи последовательно конден™ сатору установлен регулируемый резистор, к управляющему входу которого подключена цепь обратной связи.
8.Преобразователь по пп. 5-7, отличающийся тем, что электромеханический инерционный датчик предельного замедления включает
н себя маховик, связанный с пружиной определяющей пороговую величину замедления, и замыкаемый маховиком переключатель.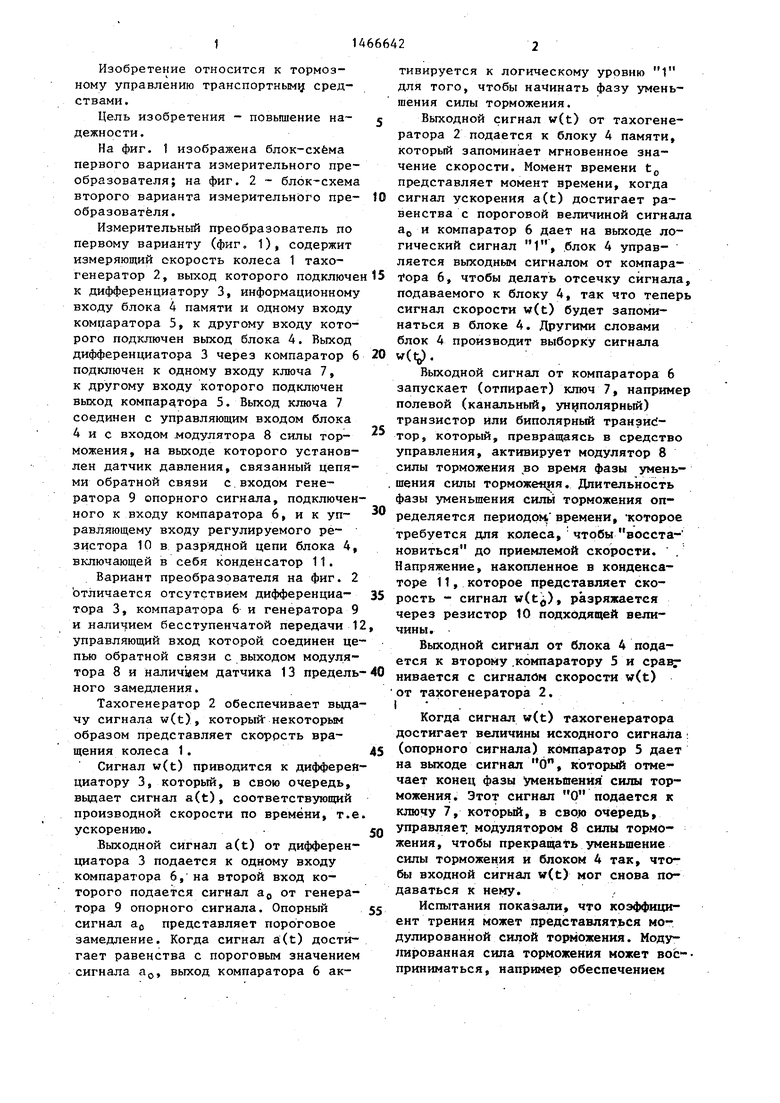
| название | год | авторы | номер документа |
|---|---|---|---|
| Модулятор силы торможения | 1984 |
|
SU1321368A3 |
| Модулятор силы торможения для гидравлических автомобильных тормозов | 1984 |
|
SU1373309A3 |
| Противоблокировочное устройство для торможения вращающегося элемента колеса автомобиля | 1976 |
|
SU1331421A3 |
| Гидравлическая тормозная система для колеса автомобиля | 1977 |
|
SU1373308A3 |
| Устройство для торможения колеса автомобиля | 1976 |
|
SU1421252A3 |
| Противоблокировочное тормозное устройство автомобиля | 1978 |
|
SU1189333A3 |
| Противоблокировочное устройство для гидравлического тормоза транспортного средства | 1974 |
|
SU1243615A3 |
| Датчик замедления колеса транспортного средства | 1976 |
|
SU1346038A3 |
| Противоблокировочное устройство для тормозной системы транспортного средства | 1973 |
|
SU622392A3 |
| Противоблокировочное тормозное устройство транспортного средства | 1980 |
|
SU927602A2 |
Изобретение касается тормозного управления транспортными средствами. Цель изобретения - повышение надежности, Тахогенератор 2 подключен к входам дифференциатора (Д) 3, блока 4 памяти, компаратора (К) 5. Выход Д 3 соединен с входом Кб, который подключен к входу ключа 7, выход которого соединен с входом модулятора 8 силы торможения и управляющим вхо- дбм блока 4. Выход блока 4 соединен с входом К 5, выход которого соединен с входом ключа 7. Скорость разрядки блока 4 регулируется резистором 10, соединенным с цепью обратной связи от модулятора 8. 2 с. и 6 з.п. ф-лы, 2 ил. С
(риг. 2
| Технический бюллетень фирмы Бош Bosch techn, Berichte 7(1980) 2, с | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
