мой 1 и тягой 5 шарнирно соединены двунлечие рычаги для подъема и опускания грузонесущего стола 3. Плечи 6 и 7 каждого рычага связаны между собой посредством шарнирно соединенной с тягой 5 поворотной оси 8 и выполнены в месте их соединения с осью 8 с выступами. При подъеме и опускании стола выступы взаимодействуют 1между собой. С одним концом соответствующего плунжера 14 шарнирно соединено одно плечо 6 каждого рычага, а другое плечо 7 соединено с рамой 1. На верхних концах плунжеров 14 расположе1
Изобретение относится к области станкостроения, в частности к транспортным системам автоматических линий металлорежущих станков.
Целью изобретения является повышение безопасности работы конвейера-перекладчика.
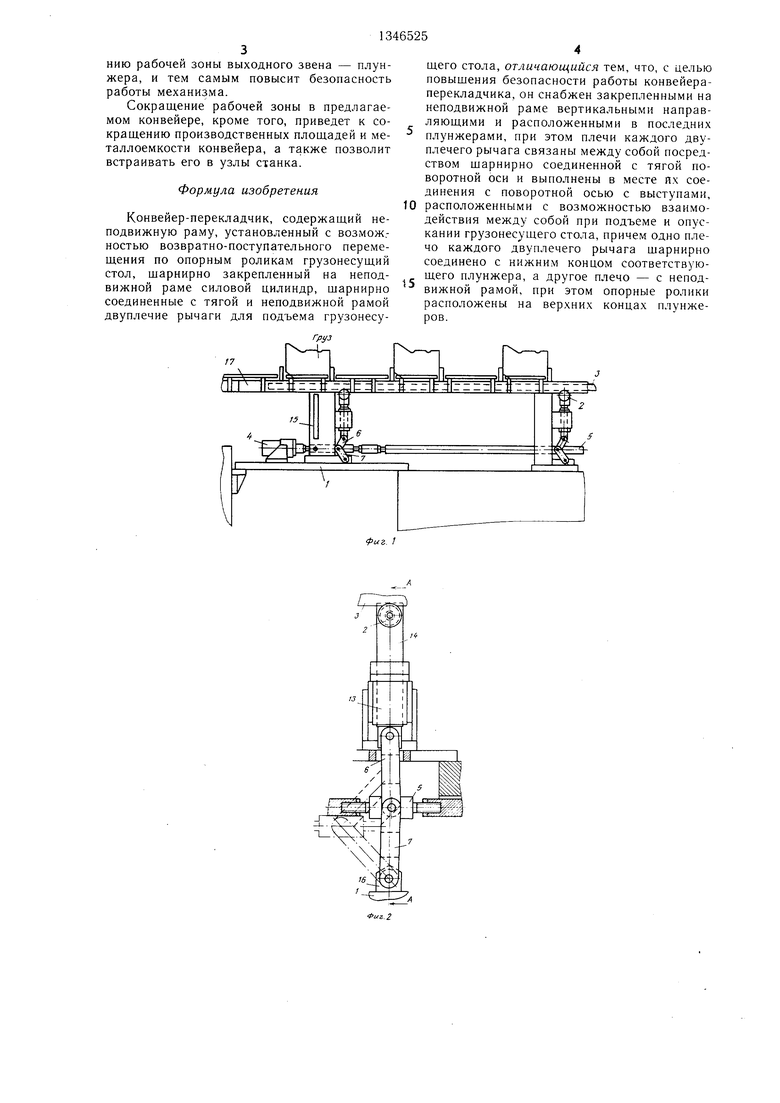
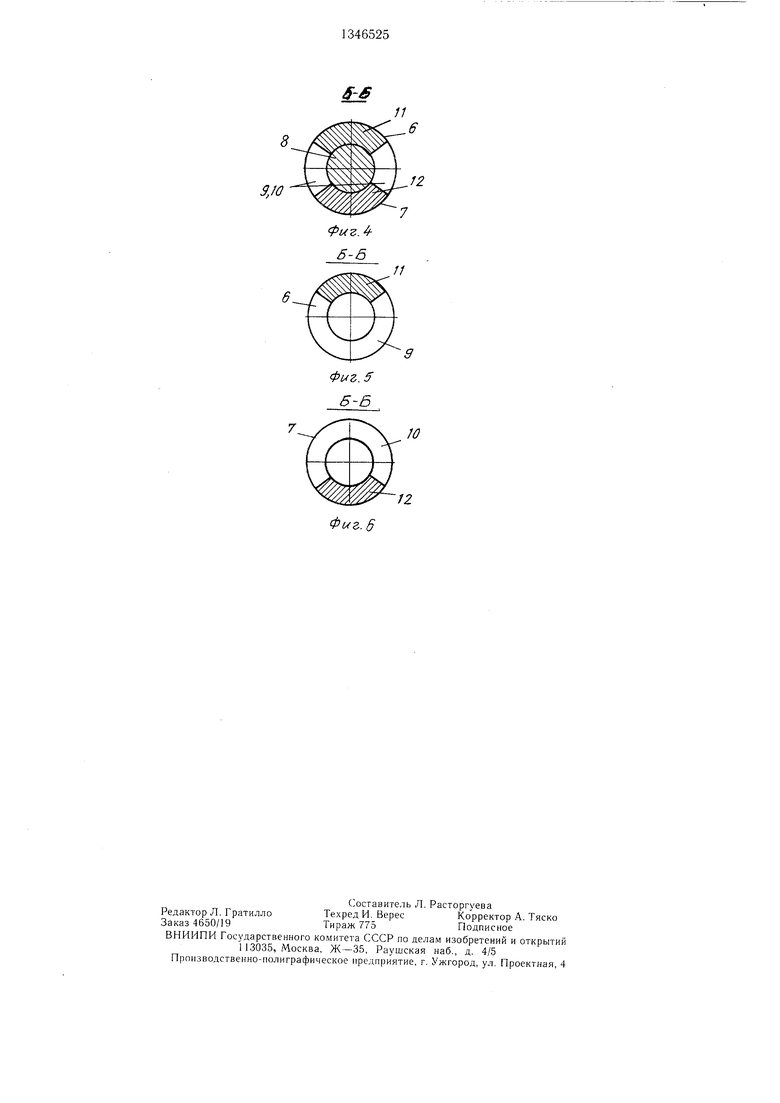
На фиг. 1 представлен конвейер-пере- кладчик, общий вид; на фиг. 2 - рычаги с тягой; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - сечение Б - Б на фиг. 3; на фиг. 5 - сечение Б - Б на фиг. 3 {рычаг 4); на фиг. 6 - сечение Б - Б на фиг. 3 (рычаг 5).
Конвейер-перекладчик содержит неподвижную раму 1, установленный с возможностью возвратно-поступательного перемещения по опорным роликам 2 грузонесущий стол 3, шарнирно закрепленный на непод- вижной раме I качающийся силовой цилиндр-гидроцилиндр 4, шарнирно соединенные с тягой 5 и неподвижной рамой 1 двуплечие рычаги с плечами 6 и 7 для подъема и опускания грузонесущего стола 3. При этом плечи 6 и 7 каждого двупле- чего рычага связаны между собой посредством шарнирно соединенной с тягой 5 поворотной оси 8 и выполнены в месте их соединения с поворотной осью 8 с секторными пазами 9 и 10 и выступами 11 и 12, расположенными с возможностью взаимодействия между собой при подъеме и опускании грузонесущего стола 3.
, Причем конвейер снабжен закрепленны- .ми на неподвижной ра.ме 1 неиодвижны.ми вертикальными направляющими 13 и рас- положенными в последних с возможностью возвратио-постунательного перемещения плунжерами 14. Вертикальные направляющие 13 закреплены на стойках 15 неподвижной рамы 1. Грузонесущий стол 3 установлен с возможностью возвратно-поступа- тельного перемещения от привода (не показан) по опорным роликам 2, которые расны опорные ролики 2. По роликам 2 с возможностью возвратно-поступательного перемещения установлен стол 3. При перемещении штока силового цилиндра через тягу 5 и ось плечи 6 и 7 рычагов поворачиваются. Плунжеры 14 по направляющим 13 перемещаются вверх, поднимая стол 3 и захватывая груз с рамы 1. При обратном ходе цилиндра стол 3 опускается. Выступы 11 и 12 взаимодействуют и препятствуют повороту плеч 6 и 7 рычагов, ограничивая ход плунжера 14 при опускании стола 3. 6 ил.
положены на верхних концах плунжеров 14. При этом одно плечо 6 каждого двуплечего рычага шарнирно соединено с нижним концом соответствующего плунжера 14, а другое плечо 7 - с кронштейном 16 неподвижной рамы 1.
При возврате грузонесущего стола 3 назад груз лежит на направляющих 17, установленных на стойках 15 неподвижной ра- м ы 1.
Устройство работает следующим образом.
При перемещении штока цилиндра 4 (вправо по чертежу) через тягу 5 и ось 8 плечи 6 и 7 рычагов поворачиваются и перемещают в направляющих 13 плунжеры 14 с роликами 2 вверх, поднимая грузонесущий стол 3 и захватывая груз с направляющих 17 неподвижной рамы 1, установленной на стойках 15. Поворот плеч 6 и 7 рычагов осуществляется в пределах угла секторных пазов 9 и 10 при взаимодействии левых торцов выступов 11 и 12.
Обратным ходом цилиндра 4 (влево по чертежу) происходит опускание грузонесущего стола 3, по пути груз кладется на направляющие 17 неподвижной рамы 1, при этом правые торцы выступов И и 12 ограничивают поворот плеч 6 и 7 рычагов и тем самым ограничивается ход плунжера 14 при опускании стола 1.
Таким образом, секторные пазы 9 и 10 и выступы 11 и 12 плеч 6 и 7 рычагов определяют величину хода плунжера 14 и стола 3 и не позволяют eiviy опускаться ниже требуемого уровня, что особенно важно в случае падений давления в гидросистеме цилиндра 4.
Такое конструктивное выполнение обеспечит безопасную работу, снизит травматизм на производстве.
Кроме того, поскольку оси рычагов связаны через тягу с приводом, а плунжер имеет строгое вертикальное перемещение в направляющих, то это приводит к сокращению рабочей зоны выходного звена - плунжера, и тем самым повысит безопасность работы механизма.
Сокращение рабочей зоны в предлагаемом конвейере, кроме того, приведет к сокращению производственных площадей и металлоемкости конвейера, а также позволит встраивать его в узлы станка.
Формула изобретения
Конвейер-перекладчик, содержащий неподвижную раму, установленный с возмож,- ностью возвратно-поступательного перемещения по опорным роликам грузонесущий стол, щарнирно закрепленный на неподвижной раме силовой цилиндр, щарнирно соединенные с тягой и неподвижной рамой двуплечие рычаги для подъема грузонесущего стола, отличающийся тем, что, с целью повышения безопасности работы конвейера- перекладчика, он снабжен закрепленными на неподвижной раме вертикальными направляющими и расположенными в последних плунжерами, при этом плечи каждого двуплечего рычага связаны между собой посредством щарнирно соединенной с тягой поворотной оси и выполнены в месте их соединения с поворотной осью с выступами, расположенными с возможностью взаимодействия между собой при подъеме и опускании грузонесущего стола, причем одно плечо каждого двуплечего рычага щарнирно соединено с нижним концом соответствующего плунжера, а другое плечо - с неподвижной рамой, при этом опорные ролики расположены на верхних концах плунжеров.
Груз
п
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейер-перекладчик автоматической линии | 1986 |
|
SU1328259A1 |
| " Перекладчик штучных грузов | 1972 |
|
SU479702A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ИЗ СТОПЫ | 1990 |
|
RU2006436C1 |
| ПОДЪЕМНО-ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО | 1992 |
|
RU2039000C1 |
| Конвейер для штучных грузов | 1977 |
|
SU948085A1 |
| ПРЕСС КРИВОШИПНЫЙ | 1998 |
|
RU2146197C1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Перегрузочное устройство для штучных грузов | 1982 |
|
SU1049392A1 |
| Вертикально-замкнутый тележечный конвейер | 1986 |
|
SU1364565A1 |
| Подъемник | 1981 |
|
SU1074798A1 |
Изобретение относится к станкостроению, в частности к транспортным системам авто.матических линий металлорежущих станков. Цель - повышение безопасности работы конвейера. Для этого на неподвижной раме 1 с шарнирно закрепленным на ней силовым цилиндром установлены вертикальные направляющие 13, в KOTOpbix расположены плунжеры 14. С раГруз х1-Д 17 (Л с со 4 Ci 01 INO СЛ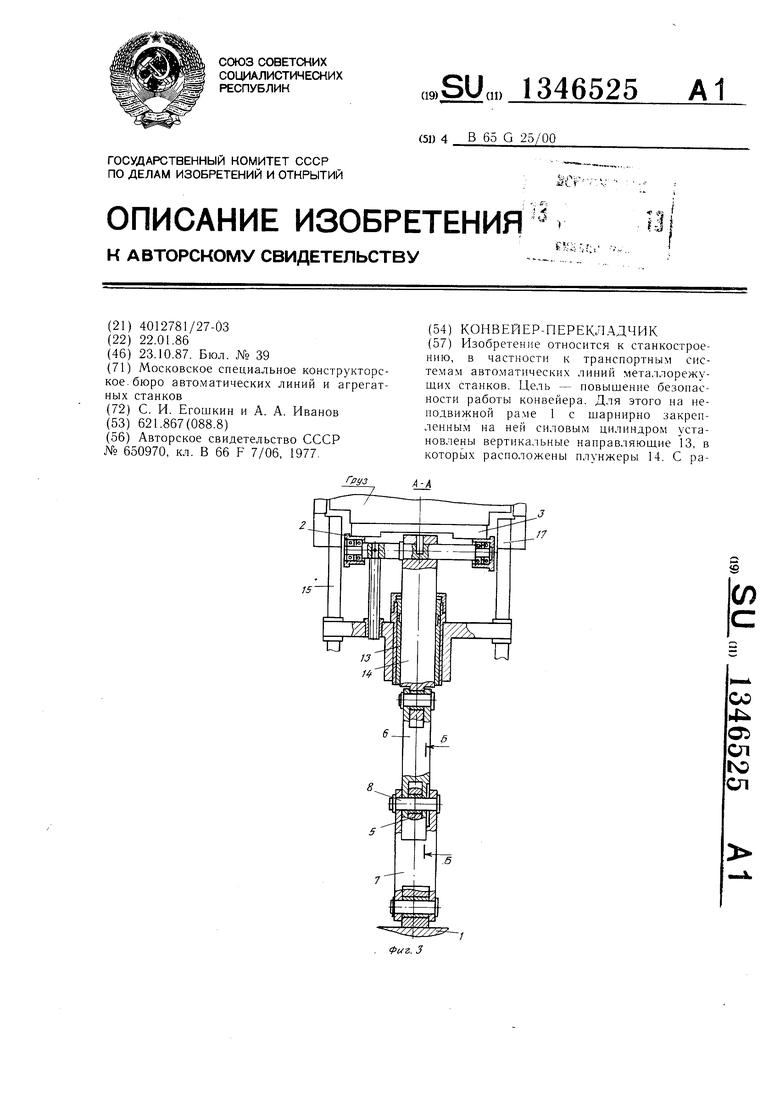
9,Ш W
12
Фиг. 6
| Подъемное устройство | 1977 |
|
SU650970A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
