Изобретение относится к промышленному транспорту, в частности к перегрузочным устройствам для штучных грузов, подающих последние в зону хранения складов для передачи к автоматическим стеллажным кранам-штабелерам и может найти применение во всех областях народного хозяйства где используются автоматизированные склады для штучных грузов.
Известно перегрузочное устройство, содержашее подвижную платформу с выступами, и неподвижные фигурные направляюшие, на которых установлена платформа 1.
Недостатком данного устройства является сложность изготовления в связи с необходимостью выполнения направляюш,их фигурными и невозможность смеш,ения груза в поперечном направлении.
Известно перегрузочное устройство, содержащее раму, шарнирно закрепленную на ней одним концом платформу, механизм подъ ема платформы, включающий в себя приводные эксцентрики, смонтированные на раме, на которых установлены направляющие ролики, прикрепленные к свободному концу платформы, механизм горизонтального перемещения г-руза вдоль платформы к датчики конечных положений платформы 2.
Недостатком известного устройства является невозможность автоматического смещения груза поперек платформы, что необходимо при использовании устройства для рабипъ с автоматическим крано-штабелером для исключения перекоса груза на телеско1)ическом захвате крана-штабелера. Этот недостаток ведет к снижению удобства его эксплуатации в автоматизированных складах.
Целью изобретения является повышение удобства- эксплуатации.
Эта цель достигается тем, что в перегрузочном устройстве для штучных грузов, содержащем раму, щарнирно закрепленную на ней одним концом платформу, механизм подъема платформы, включающий в себя приводные эксцентрики, смонтированные на раме, на которых установлены направляющие ролики, прикрепленные к свободному концу платформы, механизм горизонтального пере.мещения груза вдоль платформы и датчики положения платформы, на раме со стороны свободТного конца платформы-посредством расположенных вдоль нее осей смонтированы пары двуплечих рычагов с прикрепленными к их нижним плечам направляющими роликами, а посредством осей, расположенных параллельно осям ниже грузонесущей поверхности платформы - опорные ролики, при этом на свободном конце платформы смонтированы копиры для взаимодействия с направляющими роликами рычагов, а платформа снабжена кронштейнами с дополнительными направляющими роликами, размещенными с зазорами под эксцентриками.
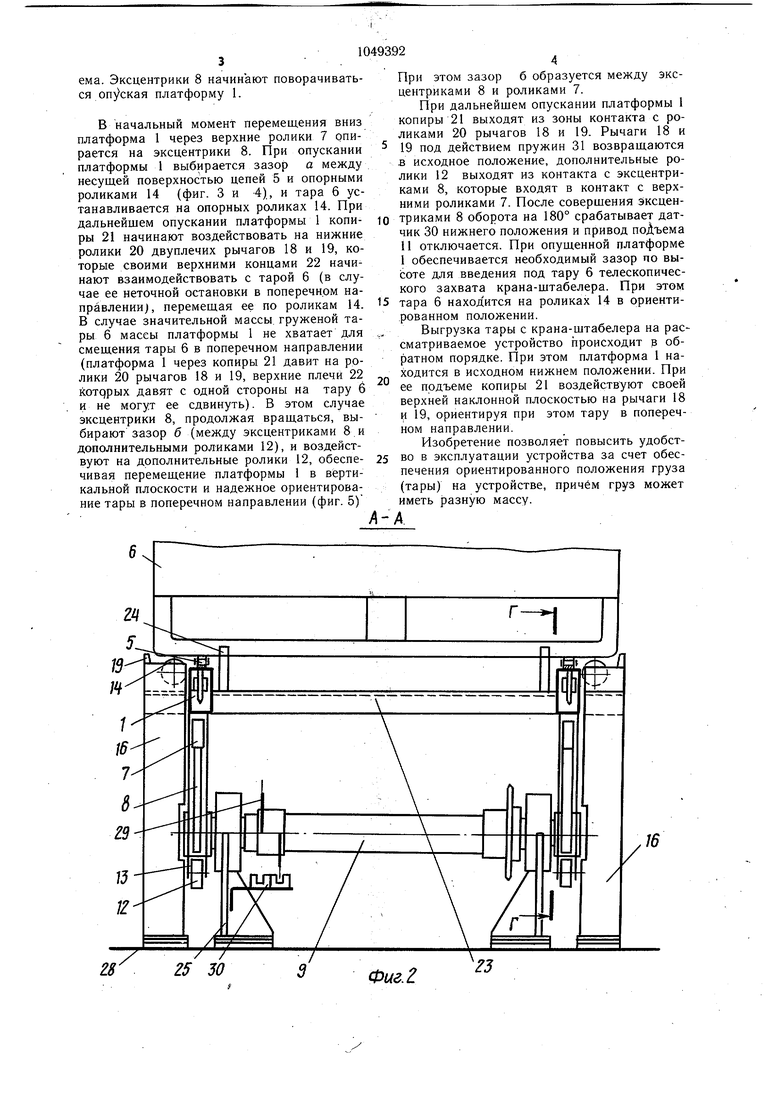
На фиг. 1 изображено устройство, обший вид; на фиг. 2 -- разрез А-А на фиг. 1;
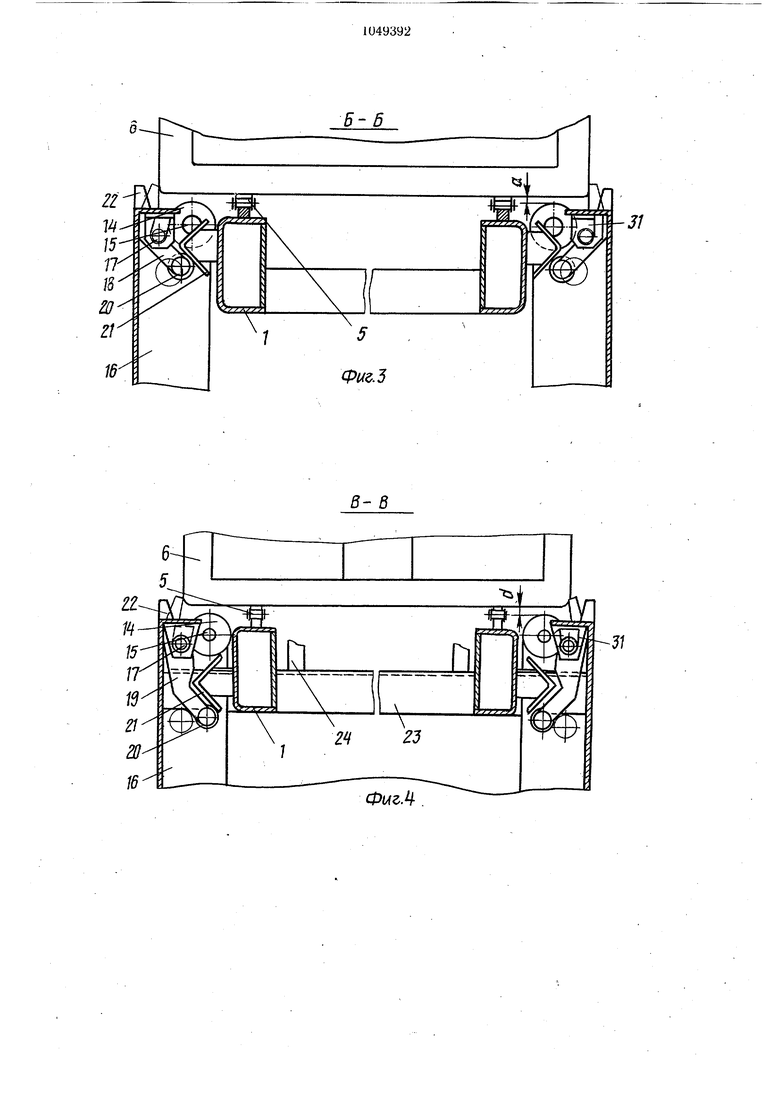
на фиг. -3 - разрез Б-Б на фиг. 1; на
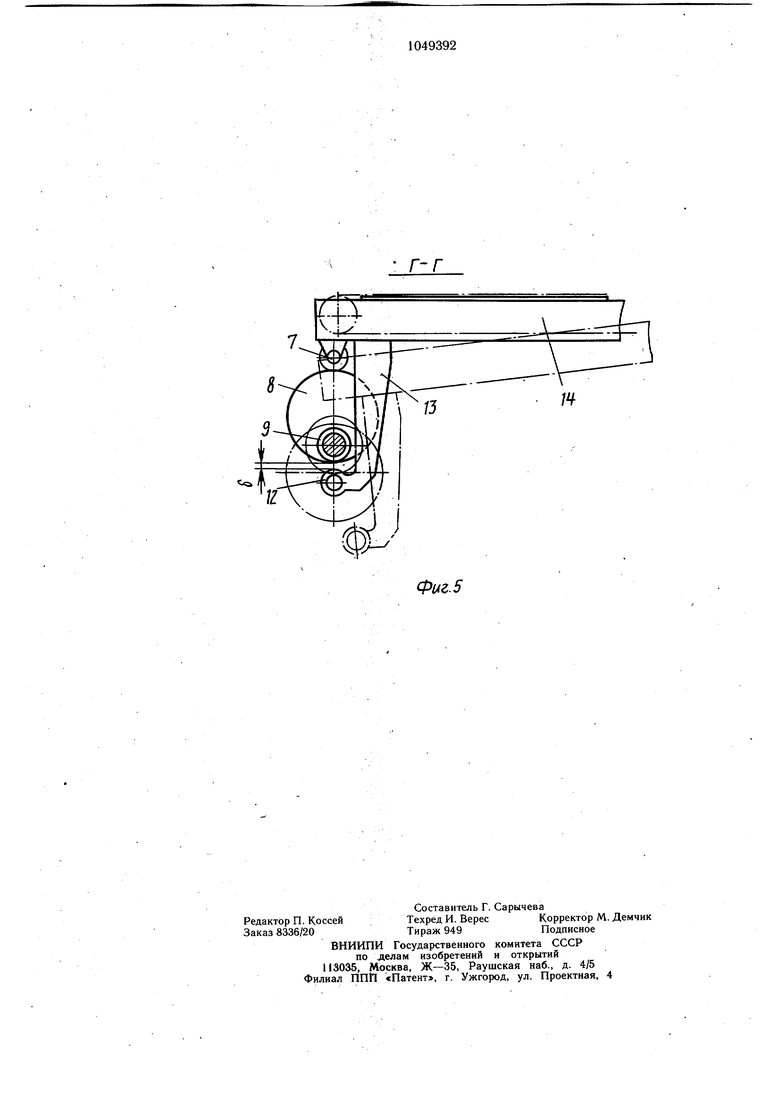
5 фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 -разрез Г-Г на фиг. 2.
Перегрузочное устройство содержит подъемную платформу 1, выполненную в виде консоли, закрепленной на осях 2, установлен0 ных на раме 3. На подъемной платформе 1 установлен привод 4 передвижения, передающий движение цепям 5, на которых расположен груз 6 (тара). Консольная часть подъемной платформы 1 опирается через ролики. 7 на эксцентрики 8 отдельно стоящего
5 вала 9, связанного цепью 10 с отдельно стоящим приводом 1Г подъема. Кроме того, эксцентрики 8 могут воздействовать на дополнительные ролики 12, жестко связанные с платформой 1 через кронщтейны 13. Опорные ролики 14 имеют возможность вращения на осях 15, закрепленных на стойках 16. Оси 15 расположены вдоль направления движения тары 6 по конвейеру. На каждой стойке 16 рамы 3 закреплены на осях 17 подпружиненные двуплечие рычаги 18 и
5 19, имеющие различные габаритные размеры, что связано с тем, что они расположены на разных расстояниях относительно оси качания платформы 1: На нижних плечах рычагов 18 и 19 имеются ролики 20 для взаимодействия при опускании (подъеме)
0 платформы 1 с наклонными плоскостями копиров 21, закрепленных на платформе 1. При этом верхние плечи 22 рычагов 18 и 19 воздействуют на тару при ее неточной остановке. На поперечине 23, соединяющей крайние стойки 16, -закреплены конечные
5 упоры 24, фиксирующие тару 6 в продольном направлении. Для точного выставления механизмов по высоте рама 3, стойки 16 и опоры 25 эксцентрикового вала имеют прокладки 26, 27 и 28.
Для фиксации эксцентриков 8 в верхнем и нижнем положениях на эксцентриковом валу 9 закреплены флажки 29, воздействующие на датчики 30, закрепленные на опоре 25 эксцентрикового вала 9. В верхнем исходном положении между грузонесущей поверхностью платформы 1 и опорными роликами 14 имеется зазор а, а между эксцентриками 8 и дополнительными роликами 12 имеется зазор б.
Устройство работает следующим образом.
При подаче тары 6 к крану-щтабелеру она перемещается на цепи 5 рассматриваемого устройства с подающего транспортного средства. При этом работает привод 4 55 передвижения, а подъемная платформа 1 находится в верхнем положении. После того как тара 6 упирается в упоры 24, привод 4 отключается и включается привод 11 подъема. Эксцентрики 8 начинают поворачиваться оп))ска я платформу 1. В начальный момент перемещения вниз платформа 1 через верхние ролики 7 опирается на эксцентрики 8. При опускании платформы 1 выбирается зазор а между несущей поверхностью цепей 5 и опорными роликами 14 (фиг. 3 и 4), и тара б устанавливается на опорных роликах 14. При дальнейшем опускании платформы 1 копиры 21 начинают воздействовать на нижние ролики 20 двуплечих рычагов 18 и 19, которые своими верхними концами 22 начинают взаимодействовать с тарой 6 (в случае ее неточной остановки в поперечном направлении), перемещая ее по роликам 14. В случае значительной массы груженой тары 6 массы платформы 1 не хватает для смещения тары б в поперечном направлении (платформа 1 через копиры 21 давит на ролики 20 рычагов 18 и 19, верхние плечи 22 icoTqpbix давят с одной стороны на тару 6 и не могут ее сдвинуть). В этом случае эксцентрики 8, продолжая вращаться, выбирают зазор б (между эксцентриками 8 и дополнительными роликами 12), и воздействуют на дополнительные ролики 12, обеспечивая перемещение платформы 1 в вертикальной плоскости и надежное ориентирование тары в поперечном направлении (фиг. 5) При этом зазор б образуется между эксцентриками 8 и роликами 7. При дальнейщем опускании платформы 1 копиры 21 выходят из зоны контакта с роликами 20 рычагов 18 и 19. Рычаги 18 и 19 под действием пружин 31 возвращаются в исходное положение, дополнительные ролики 12 выходят из контакта с эксцентриками 8, которые входят в контакт с верхними роликами 7. После соверщения эксцентриками 8 оборота на 180° срабатывает датчик 30 нижнего положения и привод поДъема 11 отключается. При опущенной платформе 1 обеспечивается необходимый зазор по высоте для введения под тару б телескопического захвата крана-щтабелера. При этом тара б находится на роликах 14 в ориентированном положении. Выгрузка тары с крана-штабелера на рассматриваемое устройство происходит в обратном порядке. При этом платформа 1 находится в исходном нижнем положении. При ее подъеме копиры 21 воздействуют своей верхней наклонной плоскостью на рычаги 18 И 19, ориентируя при этом тару в поперечном направлении. Изобретение позволяет повысить удобство в эксплуатации устройства за счет обеспечения ориентированного положения груза (тары) на устройстве, причём груз может иметь разную массу. 56
| название | год | авторы | номер документа |
|---|---|---|---|
| Перегрузочное устройство стеллажного склада | 1982 |
|
SU1068352A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Перегружатель штучных грузов | 1982 |
|
SU1022876A1 |
| Перегрузочное устройство | 1987 |
|
SU1504171A1 |
| Устройство для загрузки и разгруз-Ки СТЕллАжЕй | 1979 |
|
SU812680A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Перегрузочное устройство для штучных грузов | 1977 |
|
SU701896A1 |
| Склад для хранения штучных грузов | 1989 |
|
SU1729958A1 |
| Транспортно-перегрузочное устройство | 1991 |
|
SU1754586A1 |
| Перегружатель для штучных грузов | 1980 |
|
SU981130A1 |
ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ ШТУЧНЫХ ГРУЗОВ, содержащее раму, шарнирно закрепленную на ней одним концом платформу, механизм подъема платформы, включающий в себя ,приводнь1е эксцентрики, смонтированные на раме, на которых установлены направляющие ролиI //-/ 15 28 /J 10 ки, прикрепленные к свободному концу платформы, механизм горизонтального перемещения груза вдоль платформы и датчики конечных положений платформы, отличающееся тем, что, с целью повыщения удобства эксплуатации, на раме со стороны свободного конца платформы посредством расположенных вдоль нее осей смонтированы пары двуплечих рычагов с прикрепленными к их нижним плечам направляющими роликами, а посредством осей расположенных параллельно осям рычагов ниже грузонесущей поверхности платформы - опорные ролики для груза, при этом на свободном конце платформы смонтированы копиры для взаимодействия с направляющими .роликами ры,чагов, а платформа снабжена кронштейнами с дополнительными направляющими ро ликами, размещенными с .зазорами под эк(Л сцентриками. со СО СО IN5 П Z7 }6 Фиг.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ поддонов с ГРУЗАМИ С РОЛЬГАНГА НА ГРУЗОПОДЪЕМНИК КРАНА-ШТАБЕЛЕРА | 0 |
|
SU390004A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Перегрузочное устройство для складов штучных грузов | 1973 |
|
SU475333A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
