Изобретение относится к машиностроению, в частности к транспортным средствам для перемещения штучных грузов при межоперационных технологических процессах.
Цель изобретения - повышение надежности работы конвейера и снижение энергоемкости.
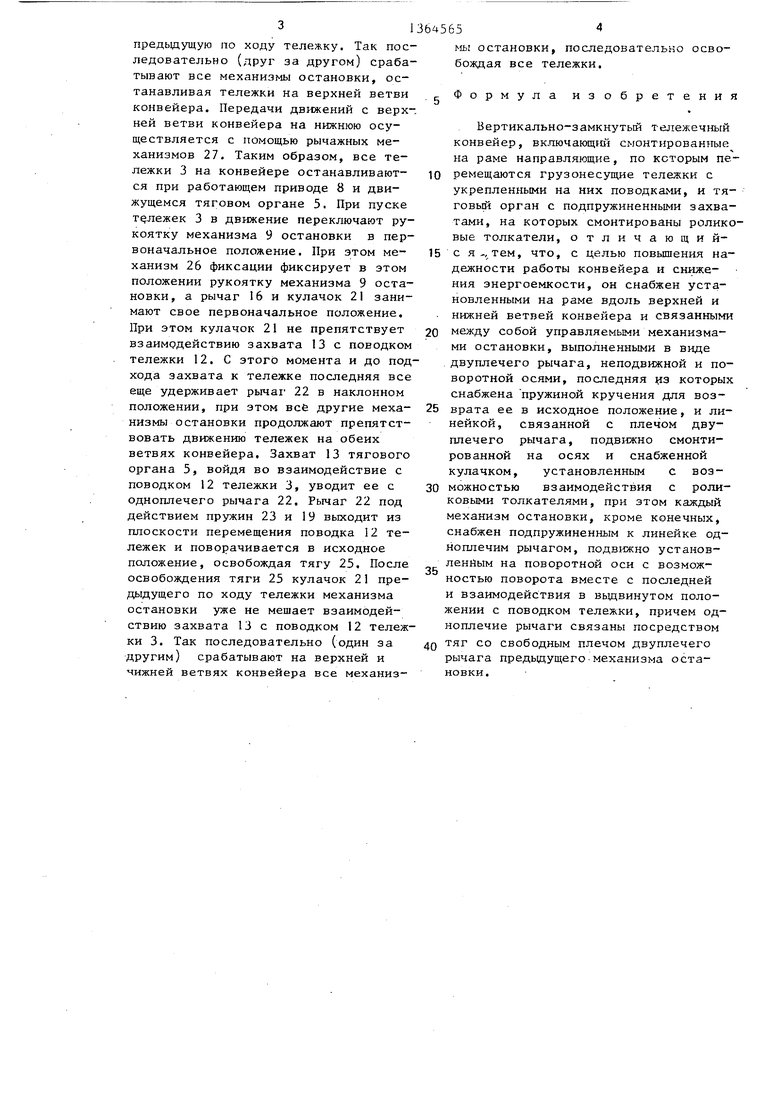
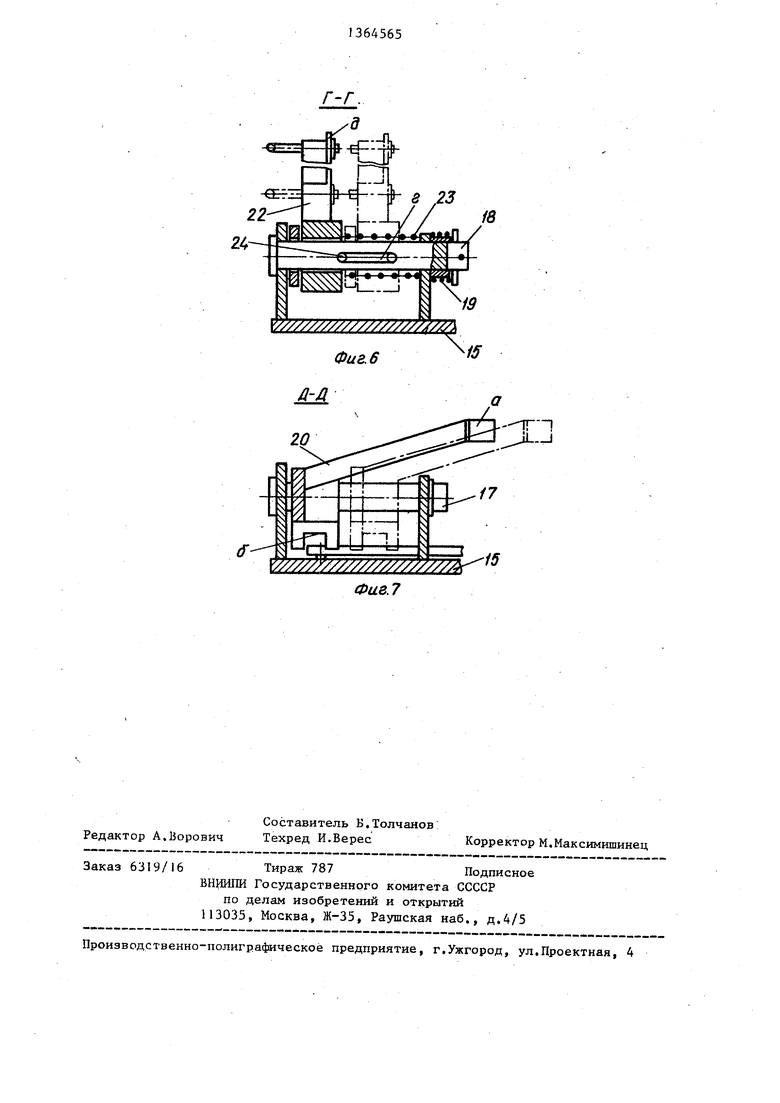
На фиг.1 изображен предлагаемый конвейер, общий вид; на фиг. 2 - рама с установленными механизмами остановки, общий вид; на фиг.З - разрез А-А на фиг.2; на фиг. 4 - вид Б на фиг.2; на фиг.5 - разрез В-В на фиг.4; на фиг. 6 - разрез Г-Г на фиг.4; на фиг. 7 - разрез Д-Д на фиг.4.
Конвейер содержит раму 1, направляющие 2, по которым перемещаются грузонесущие тележки 3, направляющие 4 для тягового органа 5, а также механизм fii опускания тележек, механизм 7 подъема тележек и привод 8. На раме 1 в зоне рабочих мест установлены механизмы 9 остановки, между рабочими зонами - промежуточные механизмы 10 остановки, а по концам конвейера конечные механизмы 11 остановки. На каждой тележке 3 установлен поводок 12, взаимодействующий с подпружиненными захватами 13, которые имеют роликовые толкатели 14. Механизмы 9 и 10 остановки включают в себя смонтированные на основании 15 двуплечий рычаг 16, а также неподвижную ось 17 и поворотную ось 18, на которой для возврата ее в исходное положение установлена пружина 19 кручения. На осях 17 и 18 установлена (ЛИнейка 20 с закрепленным .на ней кулачком 21, причем кулачок имеет скошенную кромку а, взаимодействующую при остановке тележек с роликовыми толкателями 14 захватов 13. Кроме того, линейка 20 имеет 11-образнь1й паз б, в кото- рьй входит плечо в двуплечего рычага 16. На поворотной оси 18 установлен одноплечий рычаг 22, который прижимается к линейке 20 пружиной 23, и а через щтифт 24 и паз г на оси 18 имеет возможность поворачиваться вместе с этой осью. Рычаг 22 каждого механизма 9 и 10 остановки связан тягой 25 с плечом д рычага 16 каждого предыдущего по ходу движения конвейера механизма остановки и имеет буртик е, необходи
5
0
5
мый для его удержания в рабочем положении поводком 12 тележки. Каждьш механизм Э остановки, установленный в зоне рабочего места, снабжен приспособлением управления в виде рукоятки с механизмом 26 фиксации, связанной с рычагом 16. Конечные механизмы 11 остановки не имеют одногше- чих рычагов. Кроме того, рычаги 16 механизма 11 остановки каждой ветви конвейера связаны с двуплечими рычагами 16 механизма остановки другой ветви конвейера с помощью рычажных механизмов 27.
Конвейер работает следующим образом.
Тяговый орган 5 непрерывно и равномерно движется по направляющим 4, получая движение от привода 8. При движении тягового органа 5 захваты I3 входят в зацепление с поводками 12 и продвигают тележки 3 по направляющим 2, укрепленным на раме I, со скоростью тягового органа 5. При необходимости остановить тележку 3 на технологической позиции без остановки конвейера переключают рукоятку механизма 9 остановки в положение остановки тележки 3. При этом механизм 26 фиксации фиксирует в этом положении рукоятку механизма 9 остановки, а также перемещает за плечо д двуплечий рычаг 16, который, повернувшись на своей оси плечом В, перемещает за П-образный паз б линейку 20 по осям 17 и 18, сжимая пружину 23. При своем движении линейка 20 п§- ремещает одноплечий рычаг 22 по оси 18. При этом штифт 24 также перемё-- щается по пазу г, исключая, возможность одноплечему рычагу 22 повернуться на оси 18, Ближайшая к механизму 9 остановки по ходу движения
5 тележка 3 своим поводком 12 наезжает на одноплечий рычаг 22, заставляя его повернуться вместе с осью 18, закручивая пружину 19, и натянуть тягу 25. При дальнейшем движении захват 13 роликом 14 наезжает на кромку а кулачка 21. При этом захват 13 выходит из зацепления с поводком 12 тележки 3. Тележка 3 останавливается, продолжая удерживать поводком
5 12 рычаг 22 в наклонном положении. Поворот рычага 22 через тягу 25 вызывает поворот рычага 16, предьщуще- го по коду механизма остановки с аналогичной кинематикой, останавливая
0
5
0
0
предыдущую по ходу тележку. Так последовательно (лруг за другом) срабатывают все механизмы остановки, останавливая тележки на верхней ветви конвейера. Передачи движений с верх-, ней ветви конвейера на нижнюю осуществляется с помощью рычажных механизмов 27. Таким образом, все тележки 3 на конвейере останавливаются при работающем приводе 8 и движущемся тяговом органе 5. При пуске тележек 3 в движение переключают рукоятку механизма 9 остановки в первоначальное положение. При этом механизм 26 фиксации фиксирует в этом положении рукоятку механизма 9 остановки, а рычаг 16 и кулачок 21 занимают свое первоначальное положение. При зтом кулачок 21 не препятствует взаимодействию захвата 13 с поводком тележки 12, С этого момента и до подхода захвата к тележке последняя все еще удерживает рычаг- 22 в наклонном положении, при этом всё другие механизмы остановки продолжают препятствовать движению тележек на обеих ветвях конвейера. Захват 13 тягового органа 5, войдя во взаимодействие с поводком 12 тележки 3, уводит ее с одноплечего рычага 22, Рычаг 22 под действием пружин 23 и 19 выходит из плоскости перемещения поводка 12 тележек и поворачивается в исходное положение, освобождая тягу 25, После освобождения тяги 25 кулачок 21 предыдущего по ходу тележки механизма остановки уже не мешает взаимодействию захвата 13 с поводком 12 тележки 3. Так последовательно (один за другим) срабатывают на верхней и мижней ветвях конвейера все механизмы остановки, последовательно освобождая все тележки.
Формула изобретения
Вертикально-замкнутый тележечный конвейер, включающгш смонтированные на раме направляющие, по которым пе- 0 ремещаются грузонесущие тележки с укрепленными на них поводками, и тя- говьш орган с подпружиненными захватами, на которых смонтированы роликовые толкатели, отличаю щи й- 5 с я-,тем, что, с целью повыщения надежности работы конвейера и стже- ния энергоемкости, он снабжен установленными на раме вдоль верхней и нижней ветвей конвейера и связанными 0 между собой управляемыми механизмами остановки, выполненными в виде двуплечего рычага, неподвижной и поворотной осями, последняя ifs которых снабжена пружиной кручения для воз- 5 врата ее в исходное положение, и линейкой, связанной с плечом двуплечего рычага, подвижно смонтированной на осях и снабженной кулачком, установленньм с воз- 0 можностью взаимодействия с роликовыми толкателями, при этом каждый механизм остановки, кроме конечных, снабжен подпружиненным к линейке одноплечим рычагом, подвижно установленным на поворотной оси с возможностью поворота вместе с последней и взаимодействия в выдвинутом положении с поводком тележки, причем одноплечие рычаги связаны посредством 0 тяг со свободным плечом двуплечего рычага предыдущего-механизма остановки.
5
А-/
k - 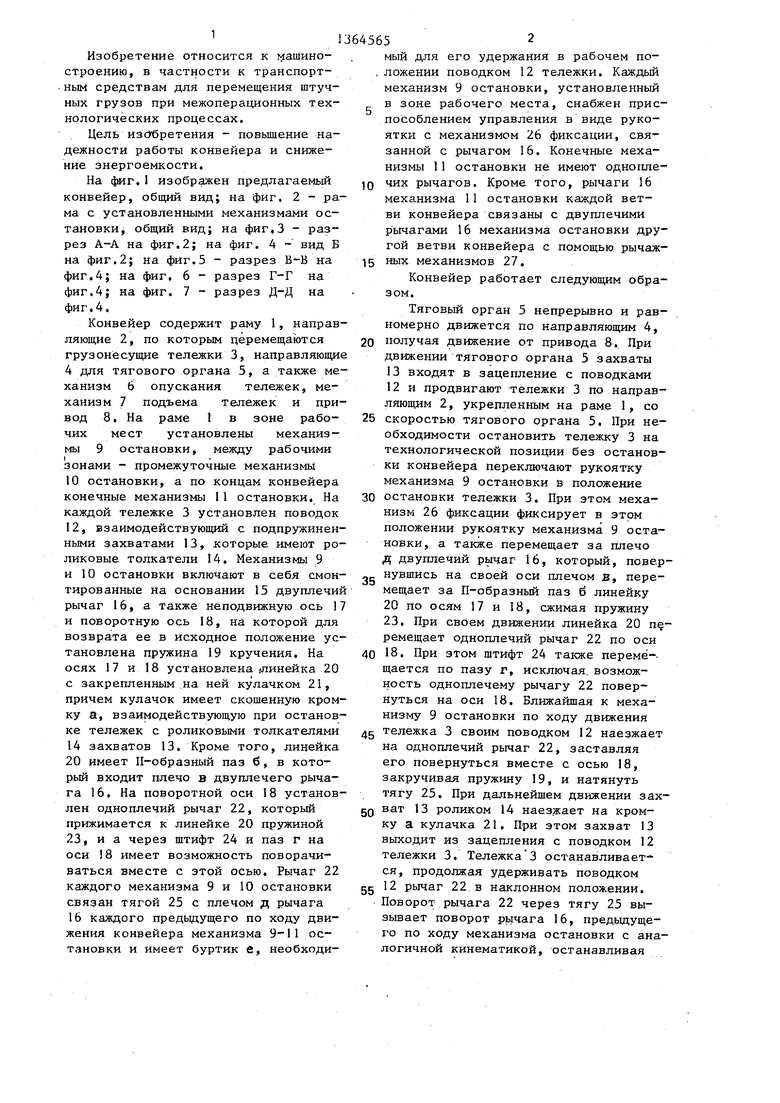
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикально-замкнутый тележечный конвейер | 1981 |
|
SU982992A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Устройство для передачи грузов | 1989 |
|
SU1641744A1 |
| Накопительный конвейер штучных грузов | 1989 |
|
SU1676958A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Устройство для сцепления грузовых тележек с тяговой цепью вертикальнозамкнутоас тележенного конвейера | 1976 |
|
SU608718A1 |
| Линия для сборки покрышек пневматических шин | 1985 |
|
SU1281441A1 |
| Устройство для перемещения тележек | 1979 |
|
SU816834A1 |
| Устройство для отделения плоских заготовок от стопы | 1986 |
|
SU1393505A1 |
| Тележечный конвейер | 1979 |
|
SU870273A1 |
Изобретение относится к машиностроению. Цель изобретения - повьше- ние надежности в работе конвейера и снижение энергоемкости. Конвейер содержит раму, направляющие для переме щения грузонесущих тележек (т) и тягового органа, механизмы опускания и подъема Т и привод. На каждой Т ус тановлен поводок, взаимодействующий с подпружиненными захватами, имекщи- ми роликовые толкатели. Вдоль верхней и нижней ветвей конвейера установлены связанные;-между собой управляемые механизмы остановки .(МО). Последние включают смонтированный на осIj а frffffs новании 15 двуплечий рычаг (р) 16, неподвижную ось 17 и поворотную ось 18 с установленной на ней пружиной кручения 19. На осях 17 и 18 подвижно установлена линейка 20 с кулачком 21, взаимодействующим при остановке Т с толкателями захватов.Паз линейки 20 входит в плечо Р 16. Каждый из МО, кроме конечных, имеет подпружиненный пружиной 23 одноплечий Р 22. Последний подвижно установлен на оси 18 с возможностью поворота вместе с ней и в выдвинутом положении взаимодействует с повородом Т. Посредством тяг 25 Р 22 связан со свободным концом р 16 предыдущего ЙО, При остановке Т без остановки конвейера плечо Р 16 поворачивается.При этом линейка 20 перемещает Р 22 по оси 18, Ближайшая к МО по ходу движения Т своим поводком наезжает на Р 22, заставляя его повернуться вместе с осью 18 и натянуть тягу 25. Захват роликом наезжает на кулачок 21 и выходит из зацепления с поводком Т. При этом Т останавливается. 7 ил. Si/fff rs гг го -fs № 25 е 20nfs f,S I (Л с со С5 сл а ел (риг.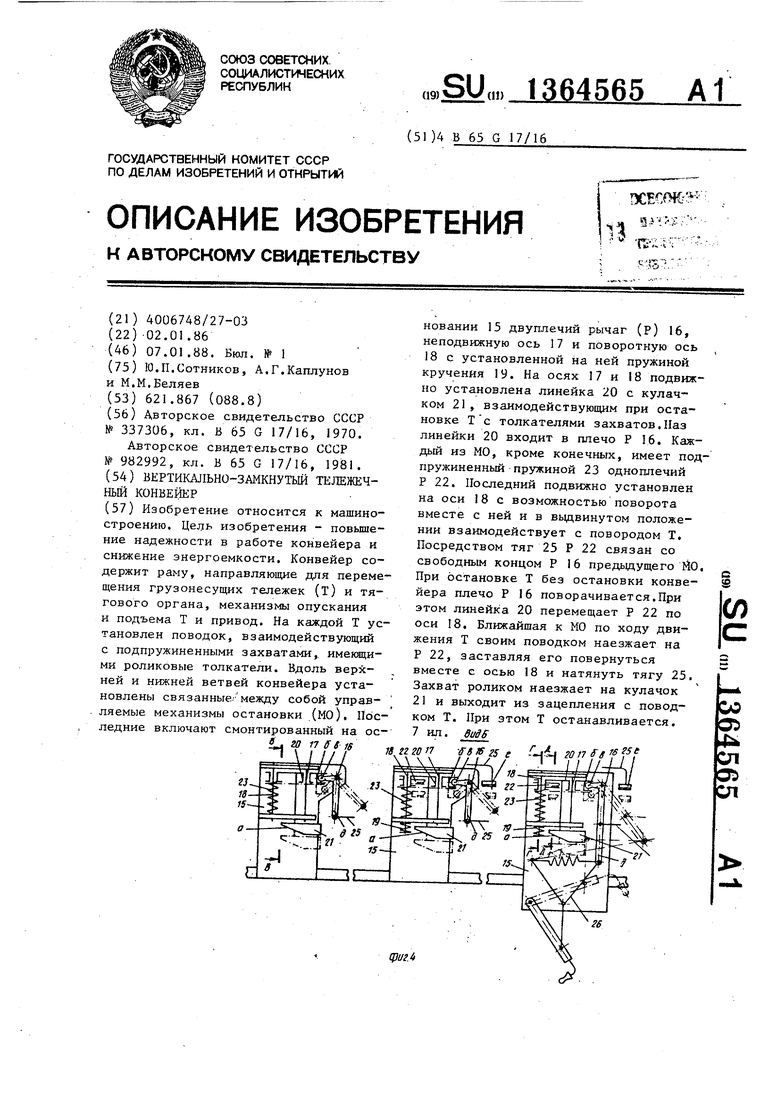
в-в.
Фиг.З
Фиг.5
19
/////////////////// ///
Фиг.6
ff---l
Фи.г.7
| ВЕРТИКАЛЬНО-ЗАМКНУТЫЙ КОНВЕЙЕР С НЕОПРОКИДЫВАЮЩИМИСЯ ТЕЛЕЖКАМИ | 0 |
|
SU337306A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Вертикально-замкнутый тележечный конвейер | 1981 |
|
SU982992A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
