Изобретение относится к станкостроению, в частности к транспортным средствам автоматических линий металлорежуш,их станков.
Целью изобретения является расширение технологических возможностей конвейера путем увеличения разности высот подъема обоих участков штанг.
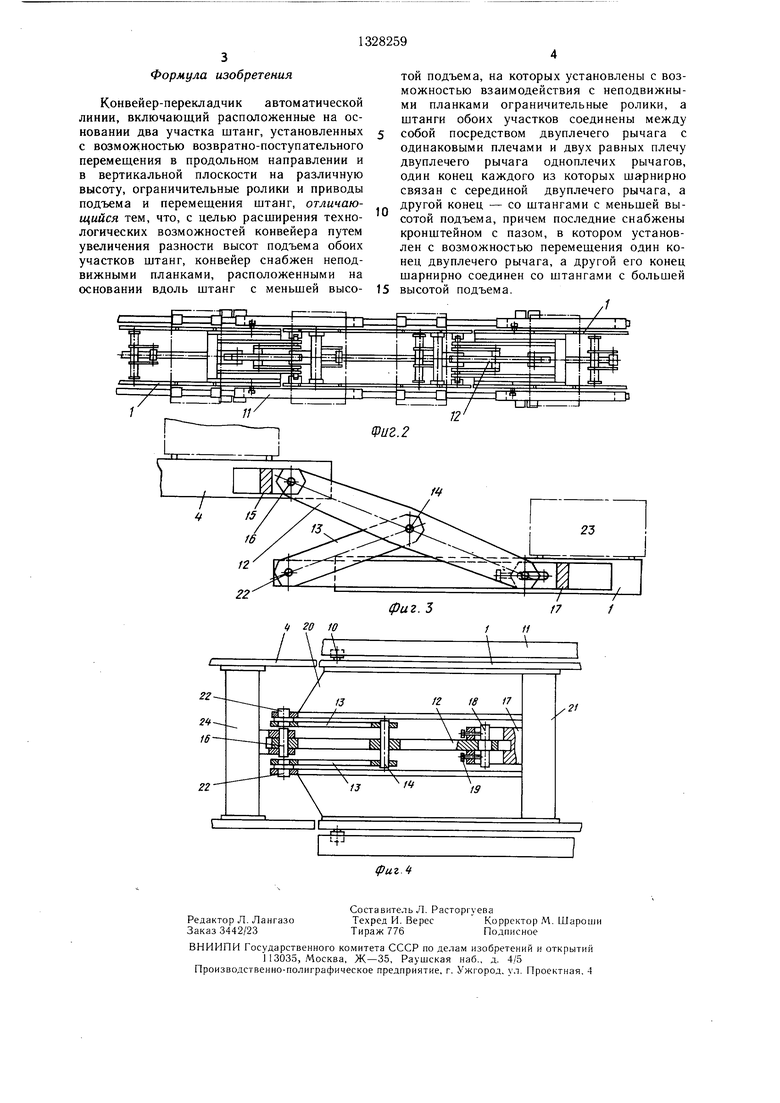
На фиг. 1 представлен конвейер-перекладчик, вид спереди; на фиг. 2 - то же, вид в плане; на фиг. 3 - соединение штанг в увеличенном масштабе; на фиг. 4 - то же, вид в плане.
Конвейер-перекладчик состоит из двух смежных участков штанг, установленных с возможностью возвратно-поступательного перемешения в продольном направлении и в вертикальной плоскости на различную высоту.
Причем штанги 1 с меньшей высотой подъема расположены на роликах 2 подъемных двуплечих 3, а штанги 4 с большей высотой подъема - на роликах 2 подъемных двуплечих рычагов 5.
Штанги 1 и 4 обоих участков приводятся в движение приводом подъема и переме- ш.ения (не показан) посредством тяг 6 и 7 двуплечих подъемных рычагов 3 и 5 с разными плечами. Оси 8 поворота рычагов 3 и 5 закреплены на неподвижных рамах 9 конвейера.
Для предохранения штанг 1 с меньшей высотой подъема от вылета их с роликов 2 рычагов 3 на боковых плоскостях штанг 1 укреплены ограничительные ролики 10, которые ограничивают штанги 1 в верхнем положении и заш,ишены от попадания стружки неподвижными планками 11, закрепленными на неподвижной раме 9 конвейера- перекладчика.
Стыковка штанг 1 и 4 двух смежных участков конвейера-перекладчика осушест- вляется посредством рычажно-шарнирного механизма, выполненного из двуплечего рычага с одинаковыми плечами и двух равных плечу двуплечего рычага 12 одноплечих рычагов 13, один конец каждого из которых шарнирно связан при помоши оси
14с серединой двуплечего рычага 12, а другой конец - со штангами 1 с меньшей высотой подъема.
Один из концов рычага 12 через вилку
15с осью 16 шарнирно соединен со штангами 4 участка с большей высотой подъема. Штанги 1 с меньшей высотой подъема снабжены кронштейном 17, имеюшим горизонтальный паз, в котором установлен с возможностью перемешения другой конец двуплечего рычага 12 при помоши пальца 18, пропушенного сквозь двуплечий рычаг 12. На кронштейне 17 предусмотрены расположенные в его пазу регулируемые упоры 19 для предотврашения отрыва штанг 4 от роликов 2 на рычагах 5.
0
Две штанги 1 с меньшей высотой подъема соединены с помощью рамы 20, на стяжке 21 которой расположен кронштейн 17.
На другом конце рамы 20 на осях 22 шарнирно закреплены концы двух однопле- чих рычагов 13.
Две штанги 4 участка большего подъема детали 23 соединены стяжкой 24, на которой жестко закреплена вилка 15 с осью 16.
Штанги 1 и 4 расположены на основании 25. На нем также находятся неподвижные планки 11 вдоль штанг с меньшей высотой подъема, на которых установлены ограничительные ролики 10.
Конвейер-перекладчик работает следую- 5 ЩИМ образом.
От привода подъема (не показан) посредством тяг 6 и 7 подъемные рычаги 3 и 5 поворачиваются вокруг оси 8 поворота и поднимают на своих роликах 2 транспорт- Q ные штанги 1 и 4 обоих участков с установленными на них деталями 23.
При этом штанги 4 поднимаются рычагами 5 на большую высоту, а штанги 1 - рычагами 3 на меньшую высоту, в зависимости от соотношения плечей подъемных 5 рычагов.
Одновременно со штангами 1 и 4 поднимается двуплечий рычаг 12 рычажно- шарнирного механизма, соединяющего штанги участков с разной высотой подъема.
Поднимаясь со штангами 4, рычаг 12
поворачивается вокруг оси 14. , при этом
нижний конец рычага перемешается влево
с пальцем 18, который перекатывается по
горизонтальному пазу кронштейна 17.
Вместе с рычагами 12 поднимаются концы одноплечих рычагов 13, закрепленных шарнирно на осях 22.
Благодаря тому, что плечи рычагов 12 и 13 равны, ось 16 поднимается вертикально вверх, при этом расстояние между штангами 1 и 4 не изменяется в горизонтальном 40 направлении.
Ролики 10, закрепленные на штанге 1, взаимодействуя с планками 11, препятствуют отрыву штанг 1 от роликов 2, а упоры 19 через рычаги 12 и 13 препятствуют от- рыву штанг 4 от роликов 2.
После транспортировки детали на шаг приводом перемещения (не показан) штанги 1 и 4 опускаются. При этом рычаги 12 и 13 складываются, не выходя за габариты штанг 1 и 4.
50 При обратном движении штанг 1 и 4 в нижнее положение в конструкции нет выступающих частей.
Таким образом, конструкция конвейера- перекладчика со смежными участками, в котором осуществляется стыковка штанг 55этих участков рычажно-шарнирным механизмом, позволяет произвести подъем штанг участков с деталями на различную высоту.
35
Формула изобретения
Конвейер-перекладчик автоматической линии, включающий расположенные на основании два участка штанг, установленных с возможностью возвратно-поступательного перемещения в продольном направлении и в вертикальной плоскости на различную высоту, ограничительные ролики и приводы
той подъема, на которых установлены с возможностью взаимодействия с неподвижными планками ограничительные ролики, а штанги обоих участков соединены между собой посредством двуплечего рычага с одинаковыми плечами и двух равных плечу двуплечего рычага одноплечих рычагов, один конец каждого из которых ша-рнирно связан с серединой двуплечего рычага, а
подъема и перемещения штанг, отличаю-другой конец - со штангами с меньшей выщийся тем, что, с целью расширения техно- сотой подъема, причем последние снабжены
кронштейном с пазом, в котором установлен с возможностью перемещения один конец двуплечего рычага, а другой его конец шарнирно соединен со штангами с большей 15 высотой подъема.
nip1 /
логических возможностей конвейера путем увеличения разности высот подъема обоих участков штанг, конвейер снабжен неподвижными планками, расположенными на основании вдоль штанг с меньшей высотой подъема, на которых установлены с возможностью взаимодействия с неподвижными планками ограничительные ролики, а штанги обоих участков соединены между собой посредством двуплечего рычага с одинаковыми плечами и двух равных плечу двуплечего рычага одноплечих рычагов, один конец каждого из которых ша-рнирно связан с серединой двуплечего рычага, а
иг. 5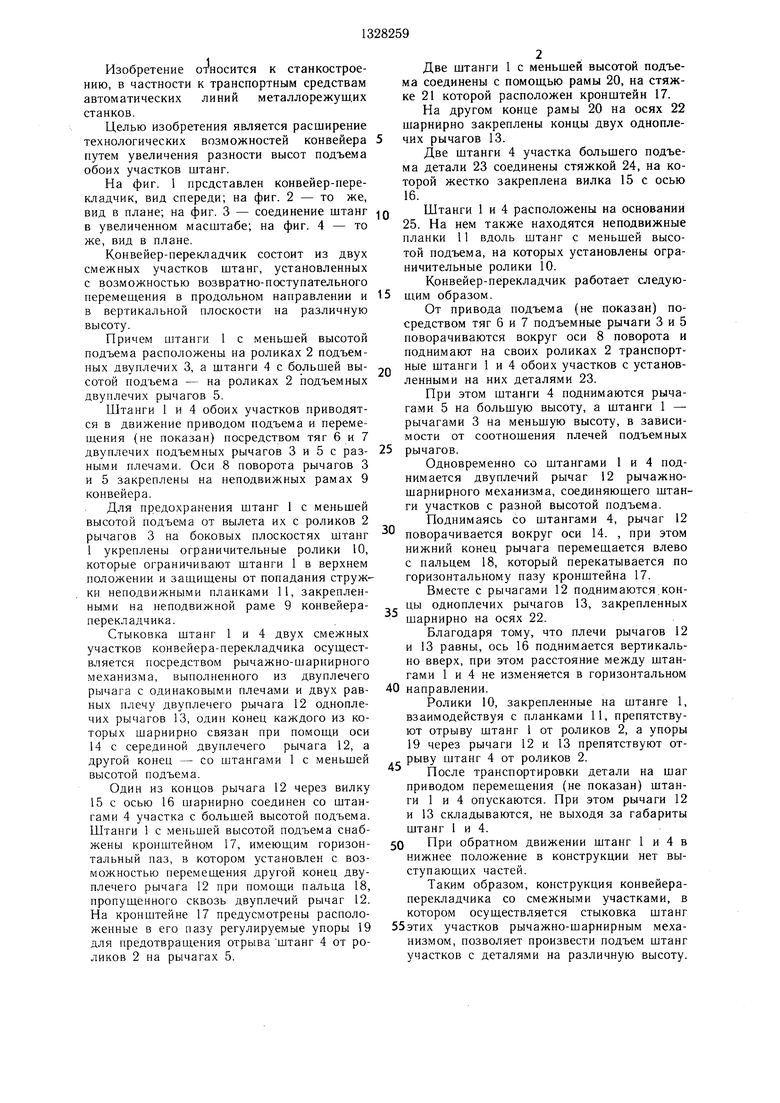
| название | год | авторы | номер документа |
|---|---|---|---|
| Перекладчик | 1976 |
|
SU722829A1 |
| " Перекладчик штучных грузов | 1972 |
|
SU479702A1 |
| Устройство для опускания спутников с одного уровня на другой | 1983 |
|
SU1137034A1 |
| Устройство для укладки в пакет металлических чушек | 1983 |
|
SU1162715A1 |
| Устройство для укладки в пакет изделий | 1985 |
|
SU1298164A1 |
| Устройство для транспортировки колес | 1977 |
|
SU740638A1 |
| Устройство для перегрузки грузов с подающего транспортера на приемный | 1981 |
|
SU962144A1 |
| Подвесной конвейер | 1984 |
|
SU1265104A1 |
| Установка для транспортирования паковок, например ленты, намотанной на катушки, от чесальных к ленточным машинам, а от последних к ровничным и прядильным машинам | 1960 |
|
SU135003A1 |
| Установка для резки плодов на дольки и вырезки сердцевины | 1989 |
|
SU1722403A1 |
Изобретение относится к области станкостроения. Цель - расширение технологических возможностей конвейера путем увеличения разности высот подъема обоих участков штанг (Ш). Расположенные на основании два участка Ш 1 и 4 установлены с возможностью возвратно-поступательного перемещения в продольном направЛенин и в вертикальной плоскости на различную высоту. При этом Ш 1 расположены на роликах 2 подъемных двуплечих рычагов (Р) 3, а Ш 4 с большей высотой подъема - на роликах 2 подъемных двуплечих Р 5. Для предохранения Ш 1 от вылета с роликов 2 на боковых плоскостях Ш 1 укреплены ограничительные ролики 10. На раме 9 конвейера закреплены неподвижные планки 11, которые защищают ролики 10 от попадания стружки. Стыковка Ш 1 и 4 осуществляется рычажно-шарнирным механизмом, выполненным из двуплечего Р 12 с одинаковыми плечами и двух равных плечу Р 12 одноплечих Р, один конец каждого из которых щарнирно связан с серединой Р 12, а другой - с Ш 1. На Ш 1 расположен кронщтейн с пазом, в котором установлен с возможностью перемещения один конец Р 12, а другой его конец щарнирно соединен с Ш 4. Посредством системы рычагов Ш 1 и 4 могут подниматься на различную высоту. 4 ил. ( (Л I1 Са//2 .ю .11 СО Ю 00 1чЭ ел со (Риг.1
Редактор Л. Лангазо Заказ 3442/23
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная. 4
Составитель Л. Расторгуева
Техред И. ВересКорректор A l. Шарошн
Тираж 776Подписное
| Шагающий конвейер | 1974 |
|
SU516587A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Транспортер-перекладчик автоматической линии | 1983 |
|
SU1126410A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
