1
Изобретение относится к промьшленному транспорту, в частности, ; к устройствам для внутрицеховых . перевозок, например, в автоматизированных степ.пажцых складах для перегрузки штучньрс грузов от автоматического -стеллажного крана-штабелера на оборудование экспедиции и обратно.
Цель изобретения - повьшение эффективности.
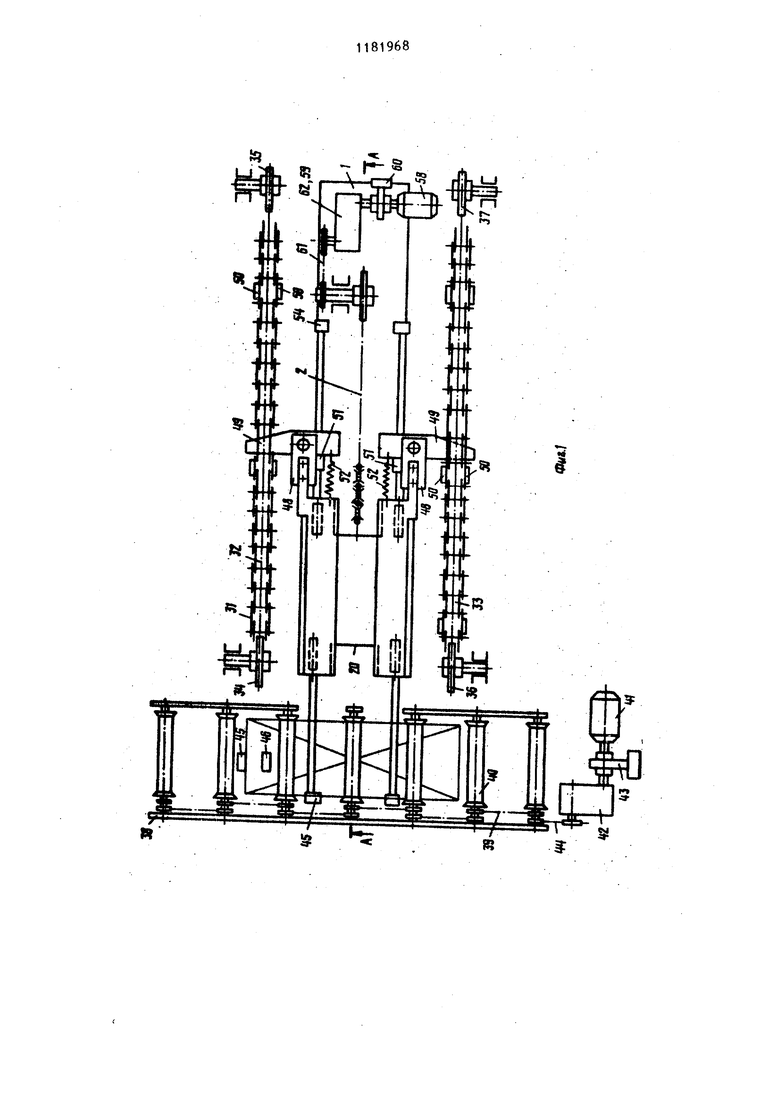
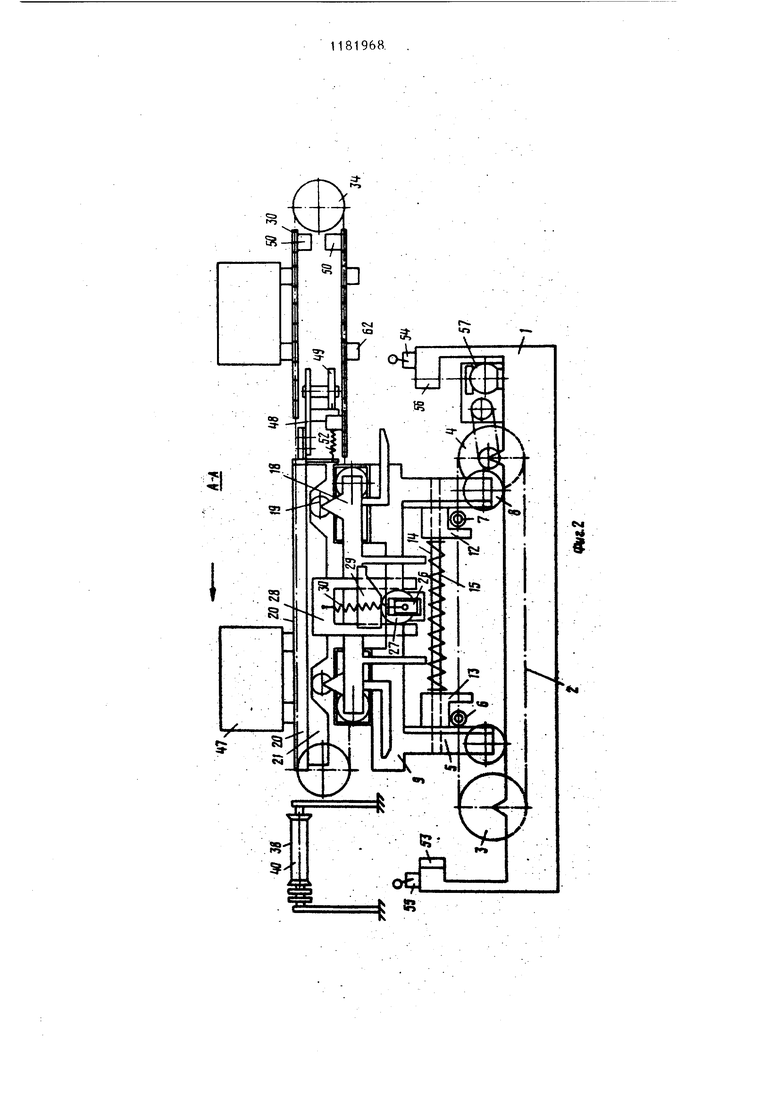
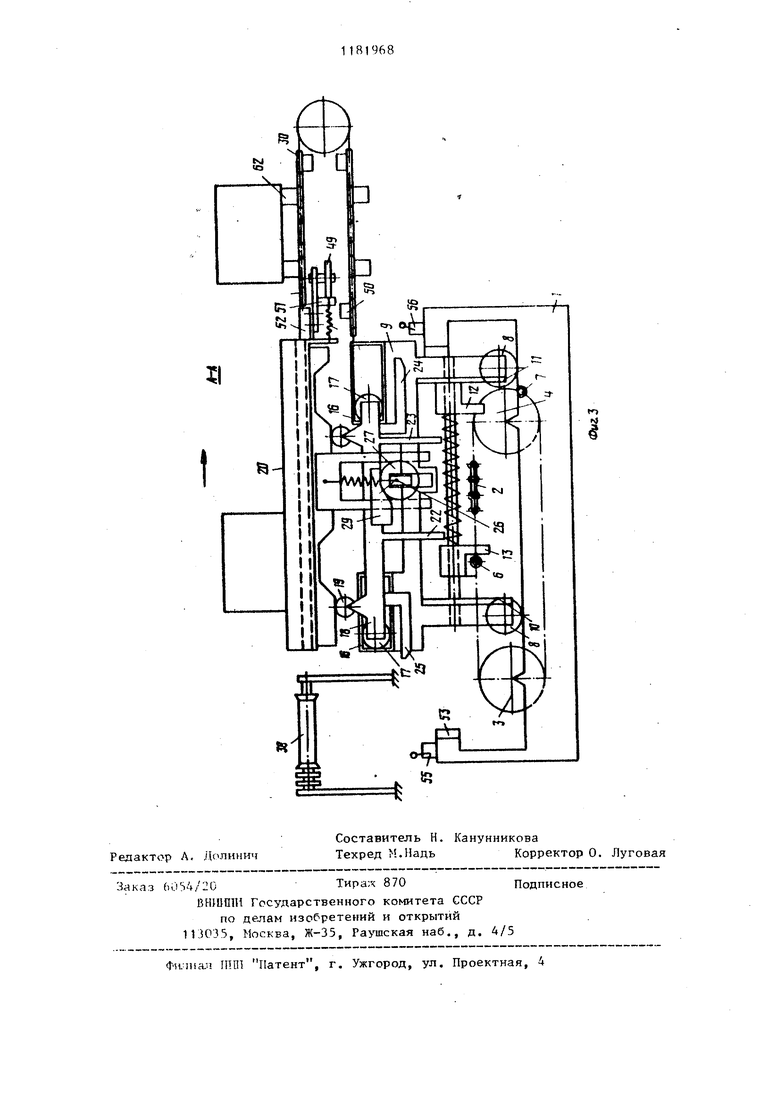
На фиг. 1 изображено устройство, вид сверху; на фиг. 2 - разрез Д-А на фиг. 1, при опущенной грузонесущей платформе; на фиг. 3 --то же при поднятой грузонесущей платформе (стрелками на фиг. 2, 3 показано I направление движения передаточного механизма).
Устройство для перегрузки издели содержит основание 1, на котором с возмож 1остью перемещения бесконечным тяговым органом 2, связанным с реверсивным приводом и выполненным в виде цепи, огибающей звездочки 3 и 4, которые закреплены на основании 1, смонтирована тележка 5. На тяговом органе 2 закреплены толкатели 6 и 7, которые приводят в движение тележку 5, включающую в Себя опирающуюся ка колеса 8 раму 9, на Которой закреплены неподвижные упоры 1 О и 1 1 и подвижные подпружиненные упоры 12 и 13. Упоры 12 и 13 подвижн ,смонтированы на осях 14 и подпружинены в сторону упоров 10 и 11 пружиной 15.
В раме 9 в горизонтальных направляющих 16 смонтирована на катках 17 промежуточная рама 18 с роликами 19, удерживающими подъемную грузон сущую платформу 20. Платформа 20 снабжена копиром 21, поверхность Которого состоит из горизонтальных и Наклонных участков, образующих выступы и впадины. Рама 18 имеет неподвижные упоры 22, 23 и шины 24, 25.
На раме 9 закреплены в вертикальных пазах сухари 26 с ограничителем 27 горизонтального перемещения грузонесущей платформы 20, на которол закреплена вилка 28, охватывающая ограничитель 27, выполненный в ввде катка, причем сухари 26 с ограничителем 27 подпружинены в сторону кулачка 29 пружиной 30. Кулачок 29 закреплен на промежуточной раме 18 и состоит из горизонтальных
68.2
и наклонных участков, образующих пазы и выступы, .с которыми взаимодействует ограничитель 27, обеспечивая фиксацию рамы 18.
Кроме того, устройство снабжено расположенным последовательно за платформой 20 конвейером 31, который; включает в себя две ветви дополнительного тягового органа 32, 33,
расположенные сим етрично относительно продольной оси платформы. Причем каждая ветвь дополнительного органа 32, 33 выполнена в виде цепи, огибающей соответствующие звездочки
34-37.
Кроме того, устройство снабжено дополнительным роликовым конвейером 38, расположенным перпендикулярно платформе 20. Роликовый конвейер 38
состоит из соединенных между собой цепными передачами 39 роликов 40, связанных с приводом их вращения.
Привод вращения роликов состоит из электродвигателя 41, связанного
с редуктором 42 тормозом 43, и цепной передачи 44.На позиции перегрузки роликовый конвейер 38 снабжен выдвижнь1м упором 45 и концевым выключателем 46, .
которые обеспечивают точную остановку груза 47 на позиции перегрузки. Для привода цепенесущего конвейера 31 (фиг. 1) на подъемной грузонесущей платформе 20 закреплены
с помощью болтов пластины 48 на которых шарнирно закреплены двупле- чие рычаги 49, одни плечи которых расположены с возможностью взаимодействия с дополнительными упорами
50, которые .закреплены на равном расстоянии друг от друга на внутренней поверхности нижних ветвей тяговый органов 32 и 33, а другие плечи каждого указанного двуплечего
рычага подпружинены относительно
закрепленных на. платформе 20 ограничителей 51 поворота рычагов 49 пружиной 52..
Пластина 48 может перестанавливаться для регулировки расположения рычага 49 вдоль платформы 20 с целью компенсации погрешностей цепных контуров.,
На основании 1 расположены упоры 53, 54, ограничивающие передвижные рамы 9 и выключатели 55 и 56, отключающие электродвигатель реверсивного привода 57 тягового органа 2. 3 Привод 57 расположен на основаНИИ 1 и состоит из электродвигателя 58, связанного с редуктором 59 тормозом 60, и цепи 61. Для образовани зазора между тяговыми органами 32 33 конвейера 31 и грузом 47 на тяго вых органах 32-и 33 смонтированы опорные элементы, выполненные в риде пластин 62, смонтированных на тяговом органе на равном расстоянии друг от друга. Устройство для перегрузки издели работает следующим образом. Например, груз 47 необходимо пер грузить с роликового конвейера 38 на конвейер 31 (фиг. 1). Груз 47 поступает по роликовому конвейеру 38 до выдвинутого упора 4 наезжает на выключатель 46. По сигналу с выключателя 46 отключается электродвигатель 41 и включается электродвигатель 58, приводя в движение тяговый орган 2 (фиг. 2) в сторону упора 53, а под действием ; толкателя 6 на упор 10 перемещается рама 9. При этом двуплечий рычаг 49 входит do взаимодействие с дополнительными упорами 50, которые закреплены на равном расстоянии друг от друга на внутренней поверхности нижних ветвей тяговых органов 31 и 32, и перемещает на один шаг грузы 47, находящиеся на конвейере 31 в сторону упора 54, освобождая место для следующего груза. Рама 9 перемещается между упорами 53 и 54, что позволяет осуществлять с такой же точностью перемещение груза на конвейере I При огибании толкателем звездочки.3 скорость рамы 9, а следовательно, и движение грузов 47 замедляется, а толкатель 7 продолжает движение со скоростью цепного органа 2 и перемещает подвижный упор 12,-После выхода толкателя 6 из зацепления с рамой .9 последняя I достигнет упора 53 и остановится, а толкатель 7, продолжая движение, начнет перемещать промежуточную 84 раму 18 упорами 12, 23. При этой ролики 19 переместятся на выступы 21 и поднимут платформу 20 с грузом 47 в крайнее верхнее положение, а двуплечий рычаг 49 выйдет из зацепления с упором 50. Это произойдет при наезде шины 25 на выключатель 55, который отключит электродвигатель 58. Одновременно с подъемом платформы 20 кулачок 29 смещается влево, а ограничитель 27 попадает в паз кулачка 29 и-заазиксирует раму18. При электродвигателя 58 (фиг. 3) рама 9 транспортируется в сторону упоpa 54. Транспортирование производится толкателем 7 путем нажатия на . упор 11. По достижении толкателем7 звездочки 4 происходит замедление движения рамы 9, а толкатель 6 нажимает на подвижный упор 13 и приводит в движение промежуточную раму 18 через упор 22i При этом ролики 19 скатьшаются по наклонным участкам в паз копира 21, что приведет к опусканию платформы 20 и установке груза 47 на опорные элементы 62 цепенесущего конвейера 31. После полного опускания платформы 20 шина 24 нажимает на концевой выключатель 56 и отключает электродвигатель 58, а двуплечий рычаг 49 входит в зацепление с упором 50. В этом положении устройство подготовлено к повторной перегрузке. Устройство .для перегрузки изделий позволяет перемещать грузы 47 по конвейеру 31 при одновременном движении грузов по роликовому конвейеру 38. При этом платформа 20 реверсивно перемещается между упорами 53, 54 без подъема, причем двуплечий рычаг 49 при холостом ходе в сторону упо- ра 54 утапливается упорами 50, а при движении в сторону упора 53 - под действием пружины 52 устанавливается в рабочее положение и передвигает цепенесущий конвейер на один шаг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
| Устройство для перегрузки изделий | 1980 |
|
SU948817A1 |
| Устройство для перегрузки изделий | 1981 |
|
SU1022919A2 |
| Устройство для перегрузки изделий | 1983 |
|
SU1150198A1 |
| Устройство для перегрузки изделий | 1986 |
|
SU1395571A1 |
| Устройство для перегрузки грузов на приемные конвейеры | 1988 |
|
SU1655874A1 |
| Роликовый конвейер | 1986 |
|
SU1413046A1 |
| Загрузочное устройство | 1982 |
|
SU1090640A1 |
| Устройство для перегрузки изделий | 1988 |
|
SU1654184A1 |
| Транспортно-перегрузочное устройство | 1991 |
|
SU1754586A1 |
1. УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ИЗДЕЛИЙ, содержащее основание, на котором с возможностью перемещения бесконечным тяговым органом смонтирована тележка, включающая опирающуюся на колеса раму, на которой закреплены подвижные и неподвижные упоры, промежуточную раму с роликами, смонтированную на катках, размещенных в горизонтальных направляющих, которые расположены на раме, смонтированную на промежуточной раме подъемную грузонесущую платформу с копиром для перемещения по нему роликов промежуточной рамы и расположенный последовательно за указанной платформой конвейер с дополнительным бесконечным тяговым органом, причем на раме закреплен ограничитель горизонтального перемещения платформы, а на бесконечном тяговом , органе - толкатели для взаимодействия с упорами рамы, о т л и ч аю щ с е с я тем, что, с целью повышения эффективности, оно снабжено дополнительным конвейером, расположенным перпендикулярно указанной платформе, и шарнирно закрепленными на платформе двуплечими рычагами, одни плечи которых расположены с возможностью взаимодействия с дополнительными упорами, которые закреплены на равном расстоянии один от другого на внутренней поверхности дополнительного тягового органа, а другие плечи каждого указанного (Л двуплечего рычага подпружинены относительно закрепленных на платформе ограничителей поворота указанных рычагов. 2. Устройство по п. 1, отличающееся тем, что основной 00 конвейер включает две ветви дополнительного тягового органа, распосо ложенные симметрично относительно О) продольной оси платформы, каждая 00 из которых выполнена в виде цепи, несущей опорные элементы, расположенные на равном расстоянии один от другого.
| Устройство для перегрузки изделий | 1980 |
|
SU948817A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
