Петлевые захваты, предназначенные для диетанционной работы в защитных камерах, или в открытых условиях, нзвестныОднако конструкция предложенного петлевого захвата значительно проще и представляет больше удобства и надежности захвата предметов простой формы в работе. Это достигается тем, что захватывающий орган выполнен в виде фиксирующей призмы и глухой петли, прикрепленной к центральному штоку.
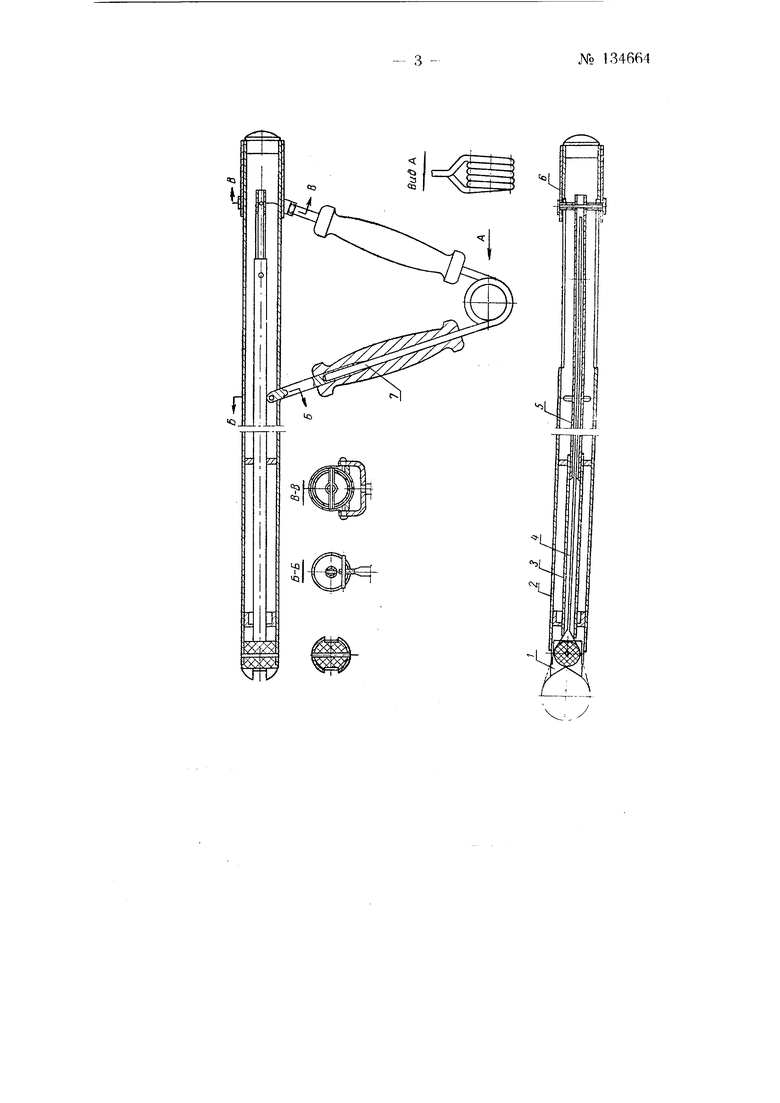
На чертеже показана конструкция петлевого захвата, в разрезе, а также четыре сечения его.
Петлевой захват состоит из следующих частей: фиксирующей призмы J, нарул ной трубки 2, средней трубки 3, гибкой ленты 4, внутренней трубки 5, направляющей трубки 6 и пружины-рукоятки 7.
Па чертел е показано исходное положение захвата. Штрихг унктирными линиями условно показано положение гибкой ленты при удержании в захвате цилиндрического предмета. Основными частями захвата являются четыре концентрически расположенные и попарно сопряженные но диа метру трубки, петлеобразно сложенная концами вместе гибкая металлическая лента, пружина-рукоятка и фиксирующая призма.
Внутренняя 5 и направляющая 6 трубки, а также гибкая лента 4 неподвижны относительно друг друга и руки оператора, а средняя 3 и наружная 2 трубки вместе с фиксирующей прпзмой / телескопически перемещаются относительно первых вперед или назад соответственно при разжатии или сжатии рукой пружииы-рукояткп /. Лента 4 расположена в продольной диаметральной прорези внутренней трубки 5 так, что часть ее по ширине симметрично выступает из этой трубки В обе стороны в виде продольных гребней. Высота этих гребней примерно равна толщине степк средней трубки 3. Эта трубка также имеет аналогичную продольную прорезь по Bceii cBoeii длине, то есть состоит из
№134664
двух полз-трубок, соединенных но концам двумя фиксирующими кольцами в одно целое одним из известных сиособов, например сваркой Таким образом, лента, шарнирно закренленная обоими концами во внутренней трубке, на всей своей расположенной внутри захвата длин:; всегда находится в прорезях внутренней и средней трубок. Благодаря этому лента при передвижении средней и нарул ной трубок не имеет возможности самопроизвольно изгибаться и деформироваться в недопустимых пределах. Концы ветвей прул ины-рукоятки 7 прикреплены к наружной 2 и направляющей 6 трубкам шарнирно. Наибольщее рабочее усилие пружины-рукоятки выбирается в пределах от нескольких килограмм до нескользких десятков килограм.м в зависимости от конкретны условий работы захвата.
Пред м е I и з о б р г т с и и я
Петлевой захват, состоящий из 3axBaTbiBa ouj.ero органа и пружин ной рукоятки, соединенной с подвижным центральным штоком, о тли чающийся тем, что, с целью удобства и надежности захвата предме тов простой формы, за.чватывающий орган выполнен в виде фиксирую щей призмы и глухой петли, прикрепленной к центральному П1току.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для дистанционной работы с радиоактивными жидкостями в защитной камере | 1958 |
|
SU119869A1 |
| ЗАКРЫВАЮЩЕЕ УСТРОЙСТВО И СИСТЕМА ДОСТАВКИ | 2010 |
|
RU2543038C2 |
| Радиохимические гидроманипуляторы | 1957 |
|
SU115288A1 |
| ЗОНТ ФИЛАТОВА | 2002 |
|
RU2232537C2 |
| ЗУБОВРАЧЕБНЫЙ ДЕРЖАТЕЛЬ ДЛЯ МАТРИЧНОЙ ФИКСИРУЮЩЕЙ ЛЕНТЫ | 2004 |
|
RU2256425C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ГОБЕЛЕНОВ | 2004 |
|
RU2259431C1 |
| Силовой тренажер | 1989 |
|
SU1718990A1 |
| УСТРОЙСТВО ДЛЯ ЭНДОХИРУРГИЧЕСКИХ МАНИПУЛЯЦИЙ | 1995 |
|
RU2096997C1 |
| КРОВООСТАНАВЛИВАЮЩИЙ ЖГУТ | 2013 |
|
RU2531449C1 |
| Автоматический зонт | 1989 |
|
SU1722424A1 |