I Изобретение относится к измерител ной технике и может быть использова но в производстве аналоговых электро измерительных приборов. Известна подвижная система элект13омеханического прибора, содержащая ось с подвижным элементом, стрелку, держатель стрелки и балансировоч ный узел, выполненный в виде уса, на котором расположена с возможностью перемещения витая спираль 1 . Недостатком данного устройства яв ляется низкая точность, обусловленная погрешностью балансировки, которая производится вручную. Известна подвижная система электромеханического прибора, содержащая ось с подвижным элементом, стрелку, держатель стрелки и балансировочный узел, выполненный в виде двух взаимно перпендикулярных резьбовых усов и системы противовесов, расположенных на них с возможностью перемещения L2 Недостатком известного устройства также является низкая точность из-за наличия небаланса подвижной части, ч вызвано погрешностью ручной установк противовесов. Кроме того, балансиров ка подобного устройства предусматрив ет многократное повторение опера ций перемещения противовесов и контроля неуравновешенности, что снижает технологичность устройства. Цель изобретения - повышение точности . i Поставленная цель достигается тем, что в подвижную систему электромеханического прибора, содержащую ось с подвижным, элементом, стрелку, держатель стрелки и балансировочный узел, выполненный в виде уса с размещенной на нем системой противовесов, введены плоская эллиптическая шайба с клеевой прослойкой и продольным сквозным отверстием и стержень,параллельный оси, при этом ус выполнен плоским, и на нем закреплен один конец стержня, друго конец которого расположен в отверстии шайбы, размещенной своей клеевой прослойкой на поверхности ус. На фиг. 1 схематично изображена предлагаемая подвижная система; на фиг. 2 - вид А на фиг.1; на фиг. 3 - эпюра процесса уравновешивания. 72 Подвижная система включает подвижный элемент, например рамку 1, на верхней стороне которой установлен держатель 2 стрелки со стрелкой 3 и плоским усом t. На верхней плоскости уса установлен противовес выполненный в виде плоской эллиптической шайбы 5,имеющей продольное сквозное отверстие 6 и надетой на стержень 7, закрепленный одним концом на усе параллельно оси 8 вращения рамки 1. Фиксация шайбы 5 на усе k осуществлена с помощью клея, слой 9 которого нанесен на нижнюю, обращенную к рамке плоскость шайбы 5. Устройство работает следуюшим образом. Под действием вращающего момента рамка 1 поворачивается вокруг оси 8 и стрелка 3 указывает на величину угла отклонения Ч , пропорционального изменяемой величине. При этом точность подвижной системы, ее динамические характеристики существенным образом зависят от качества ее балансировки, которую производят, установив измерительный механизм прибора на плат-/ форму вибростенда, и возбуждая поперечные колебания подвижной системы (в плоскости, перпендикулярной оси 8), Масса балансировочной шайбы 5 должна быть достаточная для осуществления балансировки (прибли- . зительно равна массе) держателя 2 стрелки со стрелкой 3 f перед возбуждением колебаний шайбу 5 необходимо передвинуть максимально близко к оси 8. При этом центр масс системы заведомо смещается в ту сторону от оси 8 вращения подвижной части, с которой закреплена стрелка (на фиг. 1 - левую сторону от оси 8). На обращенную к плоскому усу t сторону шайбы 5 наносится фиксирующий материал, например карбонильный клей. При возбуждении поперечных колебаний подвижной системы вследствие неуравновешенности возникают крутильные колебания вокруг оси 8. За счет возникающих при этом центробежных сил происходит смещение шайбы 5 вдоль оси У (на фиг. 1 вправо) , т.е. от стрелки. Смещение происходит до тех пор, пока не произойдет балансировка подвижной системы в поперечной плоскости в направлении оси У после чего связь поперечных и крутильных колебаний исчезнет, и крути ные колебания рамки t возбуждаться перестанут. Одновоеменно со смещением шайбы 5 вправо происходит ее необходимый поворот -относительно стержня 7, за счет чего осуществляется попе речная балансировка подвижной системы (в направлении оси X, фиг.1). Например, если центр масс подвиж ной части находится в точке М (фиг а в - поперечный эксцентриситет, то при движении платформы вибростенда в направлении +Х поворот рам ки 1 за счет сил инерции вокруг оси 00 происходит в направлении 4- V . При обратном движении платформы (в направлении -Х) поворот подвижной части происходит в направлении - f . Амплитуда поворота в направлении + больше амплитуды - Ч , так как она определяется бол шими значениями проекции эксцентри ситета ё.на ось У. Суммарный поворо подвижной части в направлении -i- Ч больше, чем в направлении - . 724 Поэтому смещение центра масс шайбы 5 относительно рамки 1 преобладающее в сторону -X, т.е. компенсирует.; начальное смещение центра массы М системы в сторону +Х и выводит суммарный центр масс на ось. У . Как показали расчеты и эксперименталыные исследования, время, необходимое для полной балансировки (сходимость процесса ) не превышает 20 с. Время выдержки приборов в покое после вибрирования, необходимое для затвердевания фиксируемого материала и, соответственно, закрепления шайбы 5 в необходимом; занятом ею положении, не превышает 10 мин. Окончательная сушка клея происходит в процессе стабилизации прибора. Таким образом, предлагаемое устройство позволяет повысить точность балансировки за счет исключения ручных операций и одновременно, за счет осуществления автоматического процесса балансировки, повысить производительность данной операции в 3 и более раз по сравнению с известными устройствами.

| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВИЖНАЯ СИСТЕМА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИБОРА | 1997 |
|
RU2144677C1 |
| Подвижная система магнитоэлектрического измерительного прибора и способ ее балансировки | 1984 |
|
SU1226315A1 |
| Стенд для балансировки подвижной части электроизмерительного прибора | 1983 |
|
SU1142743A1 |
| Подвижная система электроизмерительного прибора | 1989 |
|
SU1677646A1 |
| Устройство для статической балансировки подвижной части прибора | 1984 |
|
SU1216691A1 |
| МАНОМЕТР ПОКАЗЫВАЮЩИЙ ДЛЯ ТОЧНЫХ ИЗМЕРЕНИЙ МПТИ | 2008 |
|
RU2381465C1 |
| Подвижная система магнитоэлектрического прибора | 1986 |
|
SU1347020A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ ВРАЩАЮЩИХСЯ ТЕЛ | 2003 |
|
RU2231036C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ ВРАЩАЮЩИХСЯ ТЕЛ | 2003 |
|
RU2230303C1 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |

ПОДВИЖНАЯ СИСТЕМА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИБОРА, содержащая ось с подвижным элементом, стрелку, держатель стрелки и балансировочный узел, выполненный в виде уса с разме;ценной на нем системой противовесов, отли чающаяся тем , что, с целью повышения точности, в нее введены плоская эллиптическая шайба с клеевой прослойкой и с- продольным сквозным отверстием и стержень, параллельный оси, при этом ус выполнен плоским и на нем закреплен один конец стержня, другой конец которого рас-, положен в отверстии шайбы, размещённой своей клеевой прослойкой на поверхч ности уса.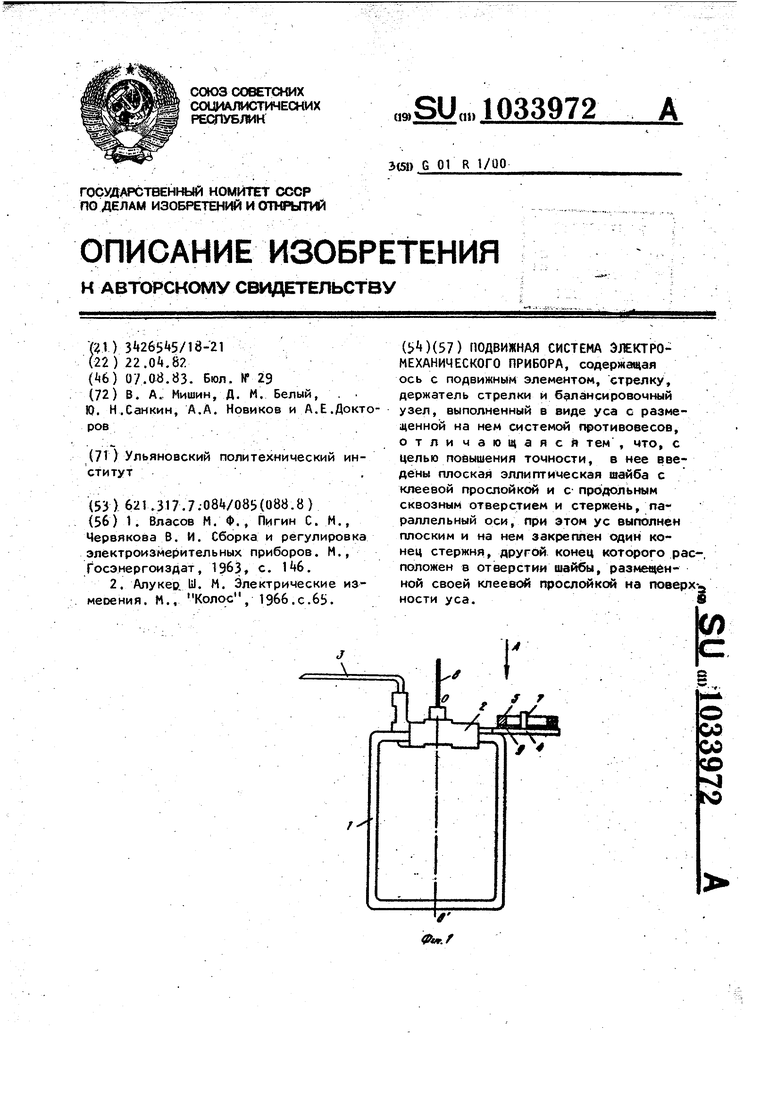
y/C7/7/7 //7f f/e
1/г.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Власов М, Ф., Пигин С | |||
| М., Червякова В | |||
| И, Сборка и регулировка электроизмерительных приборов | |||
| М., Госэнергоиздат, 19бЗ, с | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и | |||
| М | |||
| Электрические измеоения | |||
| М., Колос, 1966.с.б5 | |||
| () | |||
