1348236
ными на рычагах 17. Поворот колонны чатой рейки 31, входящей в зацепление 2 производится гидроцилиндром 30, за- с шестерней 32, насаженной на конец крепленным на раме 1 при помощи зуб- опорной колонны 2. 10 ил.
1
Изобретение относится к подвескам транспортных средств.
Цель изобретения - повышение маневренности транспортного средства.
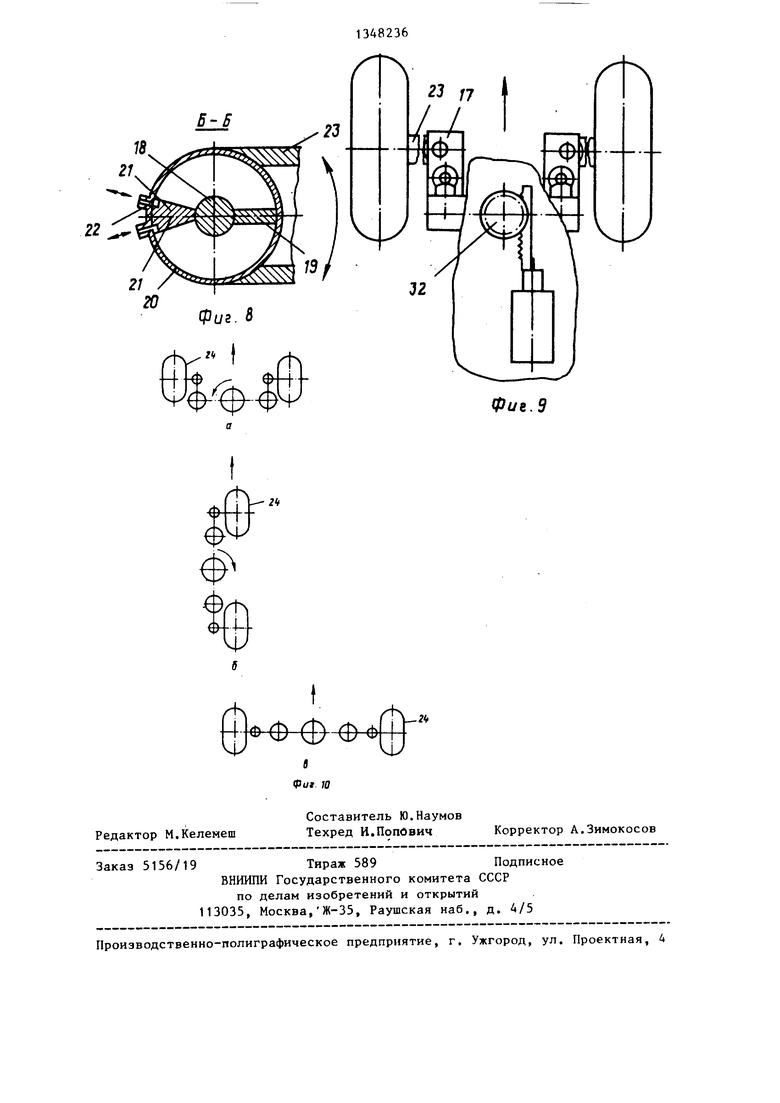
На фиг.1 изображена подвеска транспортного средства при продольном расположении колес, вид сбокуJ на фиг.2 - то же, продольный разрез по колонне и штокуi на фиг.З - то же, что на фиг.1, вид сверху, на фиг.4 - подвеска при поперечном расположении колес и максимальном размере колеи, вид спереди,- на фиг.З - то жеj при минимальном размере колеи, вид сбоку; . на фиг.6 - сечение А-А на фиг.5; на фиг.. 7 - подвеска транспортного средства при поперечном расположении колес и минимальной колее, вид спереди на фиг.8 - сечение Б-Б на фиг.7; на фиг.9 - то же, что на фиг.7, вид в плане J на фиг. 10 (с, (/,6) - кинематические схемы трансформации подвески.
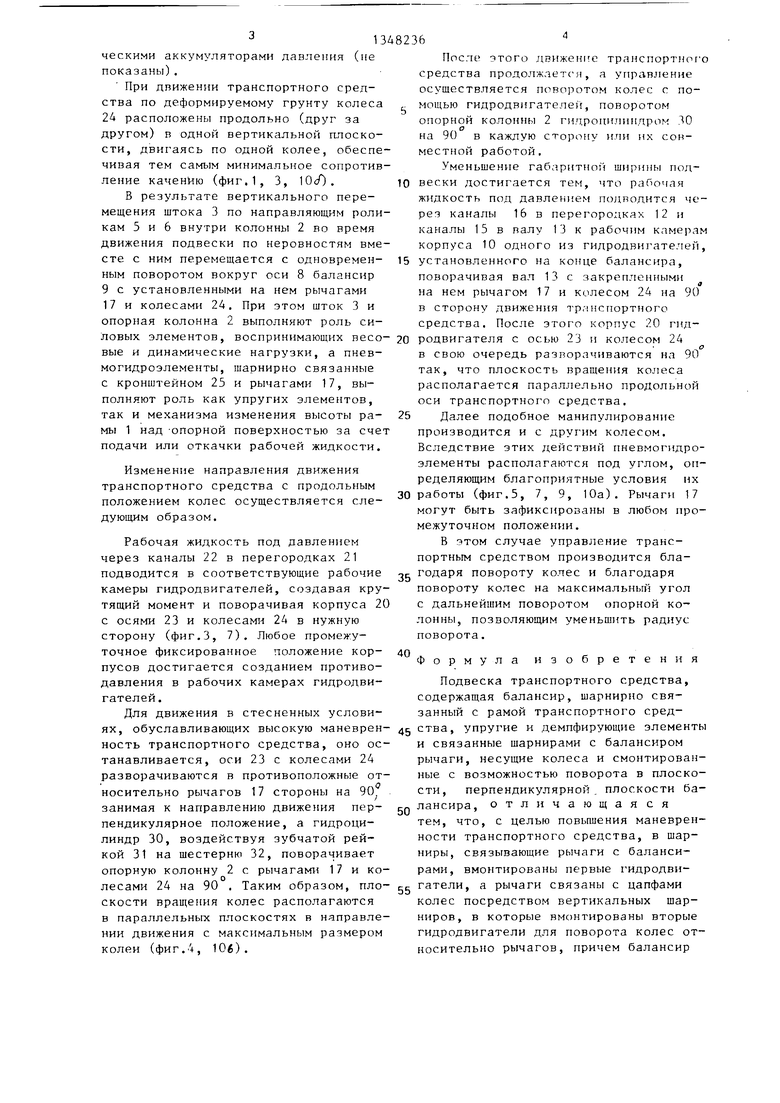
Подвеска транспортного средства Содержит раму 1 с закрепленной на не шарнирно вертикальной опорной колонной 2, в которой с возможностью поступательного перемещения установлен шток 3 с выполненными на его наружно поверхности продольными пазами 4, взаимодействующими с направляющими роликами 5 и 6, установленными на осях 7, неподвижно закрепленными в корпусе опорной колонны 2. Качение роликов 6 в отличие от роликов 5 происходит по пазам с проточками на концах, ограничивающими перемещение штока 3.
Для снижения трения и нагрева роликов во внутреннюю полость колонны 2 подается смазочно-охлаждающад жид- кость. На нижнем конце щтока 3 с помощью оси 8 установлен подвижно ба-т лансир 9, на концах которого размещены поворотные гидродвигатели, конструктивно состоящие из корпусов 10 с неподвижными перегородками 11 и 12 поворотных валов 13 и плйстин 14,
0
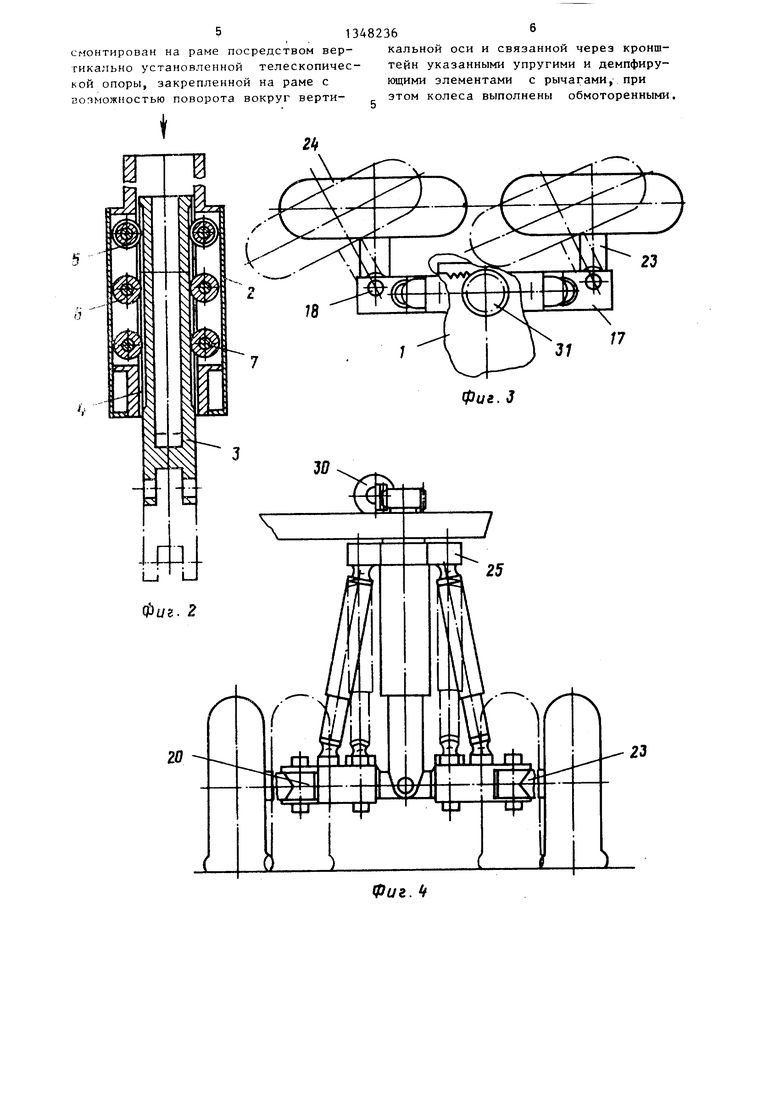
закрепленных на них. Каждый гидродвигатель имеет четыре рабочие камеры, которые соединены попарно ,каналами 15, выполненными в валу 13 в разных 5 плоскостях. Подача и слив рабочей жидкости осуществляется каналами 16, расположенными в перегородках 12. К валам 13 жестко прикреплены концы ры- чагов 17, на противоположных концах которых установлены неподвижно валы 18 с пластинами 19, заключенными в корпуса 20 с закрепленными в них перегородками 21, в которых проходят каналы 22 подачи и слива рабочей жид- 5 кости. На подвижных относительно валов 18 корпусах 20 поворотных гидродвигателей смонтированы оси 23 с установленными на них колесами 24.
0 К кронштейну 25, установленному на опорной колонне 2, крепятся с-помощью сферических шарниров 26 цилиндры 27 пневмогидроэлементов, штоки 28 которых аналогичными шарнирами соеди5 нены с гнездами 29, смонтированными на рычагах 17. Поворот опорной колонны 2 производится гидроцилиндром 30, закрепленным на раме 1, посредством зубчатой рейки 31, входящей в зацеп0 ление с шестерней 32, насаженной на конец опорной колонны 2,
Привод колес осуществляется встроенными в ступицы гидромоторами с редукторами. Подвод и откачка рабочей жидкости к поворотным гидродвигателям, пневмогидравлическим элементам, гидромоторам колес и гидроцилиндру поворота опорной колонны производится насосом с помощью трубопроводов, гибких шлангов и магистралей высокого и низкого давления (не показань).
Для поддержания нужного давления в рабочих камерах гидродвигателей и фиксированного положения корпусов и валов друг относительно друга (ввиду утечек рабочей жидкости) упомянутые гидродвигатели соединены с гидравли5
0
31348236
ческими аккумуляторами давления (не После этого движение транспортног о показаны).средства продолжается, а управление
При движении транспортного сред- осуществляется поворотом колес с постна по деформируемому грунту колеса мощью гидродвигателей, поворотом 24 расположены продольно (друг за опорной колонны 2 гидроцилиндром 30 другом) в одной вертикальной плоско- на 90° в каждую сторону или их сов- сти, двигаясь по одной колее, обеспе- местной работой.
чивая тем самым минимальное сопротив- Уменьшение габаритной ширины под- ление качению (фиг,1, 3, 10(/) . ю вески достигается тем, что рабочая
В результате вертикального пере- жидкость под давлением подводится че- мещения штока 3 по направляющим роли- рез каналы 16 в перегородках 12 и кам 5 и 6 внутри колонны 2 во время каналы 15 в валу 13 к рабочим камерам движения подвески по неровностям вме- корпуса 10 одного из гидродвигателей, сте с ним перемещается с одновремен- 15 установленного на конце балансира, ным поворотом вокруг оси 8 балансир поворачивая вал 13 с закрепленными 9 с установленными на нем рычагами на нем рычагом 17 и колесом 24 на 90 17 и колесами 24. При этом шток 3 и в сторону движения транспортного опорная колонна 2 выполняют роль си- средства. После этого корпус 20 гид- ловых элементов, воспринимающих весо- 20 родвигателя с осью 23 и колесом 24 вые и динамические нагрузки, а пнев- в свою очередь разворачиваются на 90° могидроэлементы, шарнирно связанные так, что плоскость вращения колеса с кронштейном 25 и рычагами 17, вы- располагается параллельно продольной полняют роль как упругих элементов, оси транспортного средства, так и механизма изменения высоты ра- 25 Далее подобное манипулирование мы 1 над -опорной поверхностью за счет производится и с другим колесом, подачи или откачки рабочей жидкости. Вследствие этих действий пневмогидро..элементы располагаются под углом, опИзменение направления движения j ,
ределяющим благоприятные условия их
транспортного средства с продольным 2 /л. c7n,r.т. ,-,
30 работы (фиг.5, 7, 9, Оа). Рычаги 7 положением колес осуществляется еле-
могут быть зафиксированы в любом продующим образом.
межуточном положении.
Рабочая жидкость под давлением В этом случае управление трансчерез каналы 22 в перегородках 21портным средством производится бла- подводится в соответствующие рабочие 5 годаря повороту колес и благодаря
камеры гидродвигателей, создавая кру-повороту колес на максимальный угол
тящий момент и поворачивая корпуса 20с дальнейшим поворотом опорной кос осями 23 и колесами 24 в нужнуюлонны, позволяюгцим уменьшить радиус
сторону (фиг.З, 7). Любое промежу-поворота.
точное фиксированное положение кор- 40
Формула изобретения пусов достигается созданием противо-давления в рабочих камерах гидродви- Подвеска транспортного средства, гателей.содержащая балансир, шарнирно свяДля движения в стесненных услови- занный с рамой транспортного сред- ях, обуславливающих высокую маневрен- 45 ства, упругие и демпфирующие элементы ность транспортного средства, оно ос- и связанные шарнирами с балансиром танавливается, оси 23 с колесами 24 рычаги, несущие колеса и смонтирован- разворачиваются в противоположные от- ные с возможностью поворота в плоско- носительно рычагов 17 стороны на 90 сти, перпендикулярной, плоскости ба- занимая к направлению движения пер- gQ лансира, отличающаяся пендикулярное положение, а гидроци- тем, что, с целью повышения маневрен- линдр 30, воздействуя зубчатой рей- ности транспортного средства, в шар- кой 31 на шестерню 32, поворачивает ниры, связывающие рычаги с баланси- опорную колонну 2 с рычагами 17 и ко- рами, вмонтированы первые гидродви- лесами 24 на 90 . Таким образом, пло- gg гатели, а рычаги связаны с цапфами скости вращения колес располагаются колес посредством вертикальных шар- в параллельных плоскостях в направле- ниров, в которые вмонтированы вторые НИИ движения с максимальным размером гидродвигатели для поворота колес от- колеи (фиг.4, 106).носительно рычагов, причем балансир
513482366
смонтирован на раме посредством вер- калькой оси и связанной через кронш- тикально установленной телескопичес- теин указанными упругими и демпфиру- кой опоры, закрепленной на раме с ющими элементами с рычагами, при возможностью поворота вокруг верти- j. этом колеса выполнены обмоторенными.
Фиг.
23
17
12
фи.В
f ff
фиг. 7
Б-6
18
21
22
Фие.Э
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвеска направляющего колеса гусеничного транспортного средства | 1989 |
|
SU1705174A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2011591C1 |
| Подвеска транспортного средства | 1985 |
|
SU1329999A1 |
| ШИРОКОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2019949C1 |
| Балансирная подвеска последовательно расположенных осей транспортного средства | 1985 |
|
SU1341063A1 |
| Сменный гусеничный движитель колесного транспортного средства | 2017 |
|
RU2652282C1 |
| Независимая торсионная подвескаТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU850413A1 |
| НАПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ДВУХ ЧЕТЫРЕХКОЛЕСНЫХ ТЕЛЕЖЕК С ИЗМЕНЯЕМЫМ ПОПЕРЕЧНЫМ РАССТОЯНИЕМ МЕЖДУ КОЛЕСАМИ И НАПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЧЕТЫРЕХКОЛЕСНОЙ ТЕЛЕЖКИ С ИЗМЕНЯЕМЫМ ПОПЕРЕЧНЫМ РАССТОЯНИЕМ МЕЖДУ КОЛЕСАМИ | 1994 |
|
RU2123951C1 |
| Подвеска управляемого колеса транспортного средства | 1983 |
|
SU1289701A1 |
Изобретение относится к подвескам транспортных средств. Пель изобретения - повышение маневренности транспортного средства, оснащенного подвеской. Подвеска транспортного средства содержит раму 1, на которой закреплена колонна 2. В колонне с возможностью перемещения установлен шток 3, на наружной поверхности которого выполнены пазы, взаимодействующие с направляющими роликами, установленными на осях, неподвижно закрепленных в корпусе колонны. На нижнем конце штока с помощью оси 8 установлен балансир 9, на концах которого расположены поворотные гидродвигатели, имеющие корпуса 10. К валам 13 гидродвигателей жестко прикреплены концы рычагов 17. На противоположных концах рычагов 17 смонтированы другие гидродвигатели, на корпусах которых, подвижных относительно осей 18, смонтированы оси с установленными на них колесами 24. К кронштейну 25, расположенному на колонне 2, крепятся с помощью сферических шарниров 26 цилиндры 27 пневмогидроэлементов, штоки 28 которых аналогичными шарнирами соединены с гнездами 29, смонтирован(С (Л г« 00 00 /////////////// //// ////// Фиг t
Редактор М.Келенеш
Составитель Ю.Наумов Техред И.ПопОвич
Заказ 5156/19Тираж 589Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва,Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Корректор А.Зимокосов
| Пневматический датчик уровня | 1980 |
|
SU1024737A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
