Изобретение относится к грузоподъемному оборудованию, конкретно к устройствам для подъема и перемещения
13Д
грузов,
и может быть использовано
для монтажа тяжеловесных и громоздких грузов при сборке изделий, например аппаратов колонного типа.
Цель изобретения - расширение функциональных возможностей устройства.
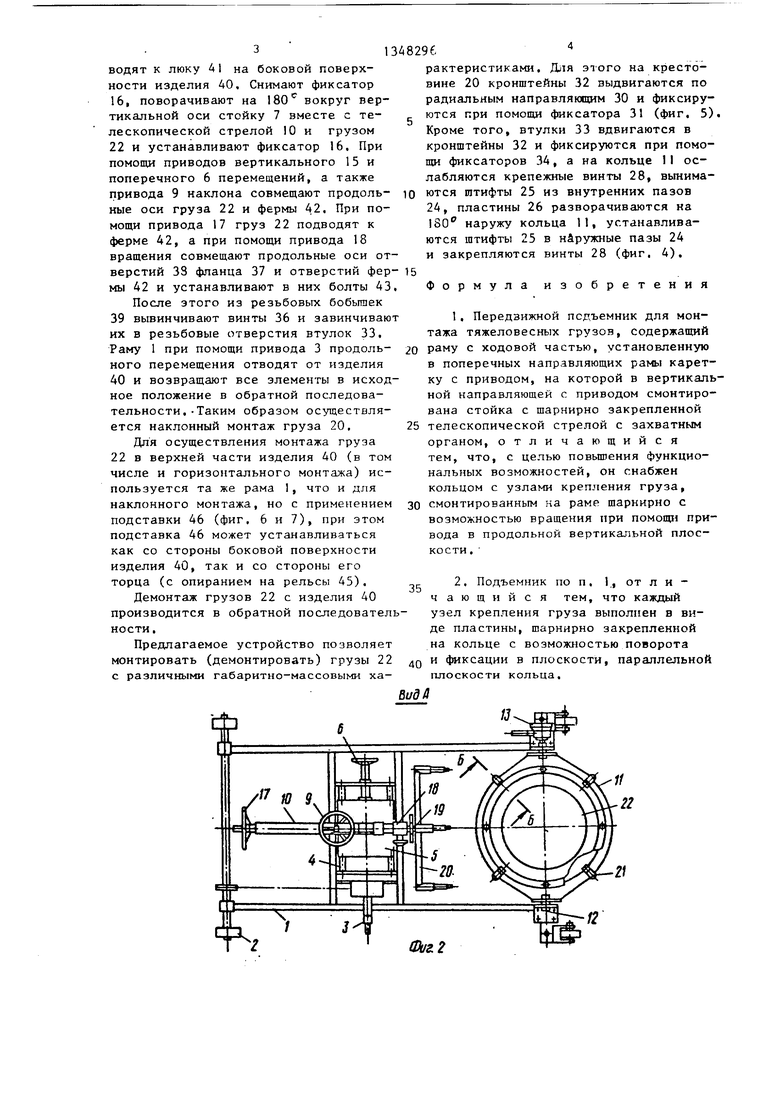
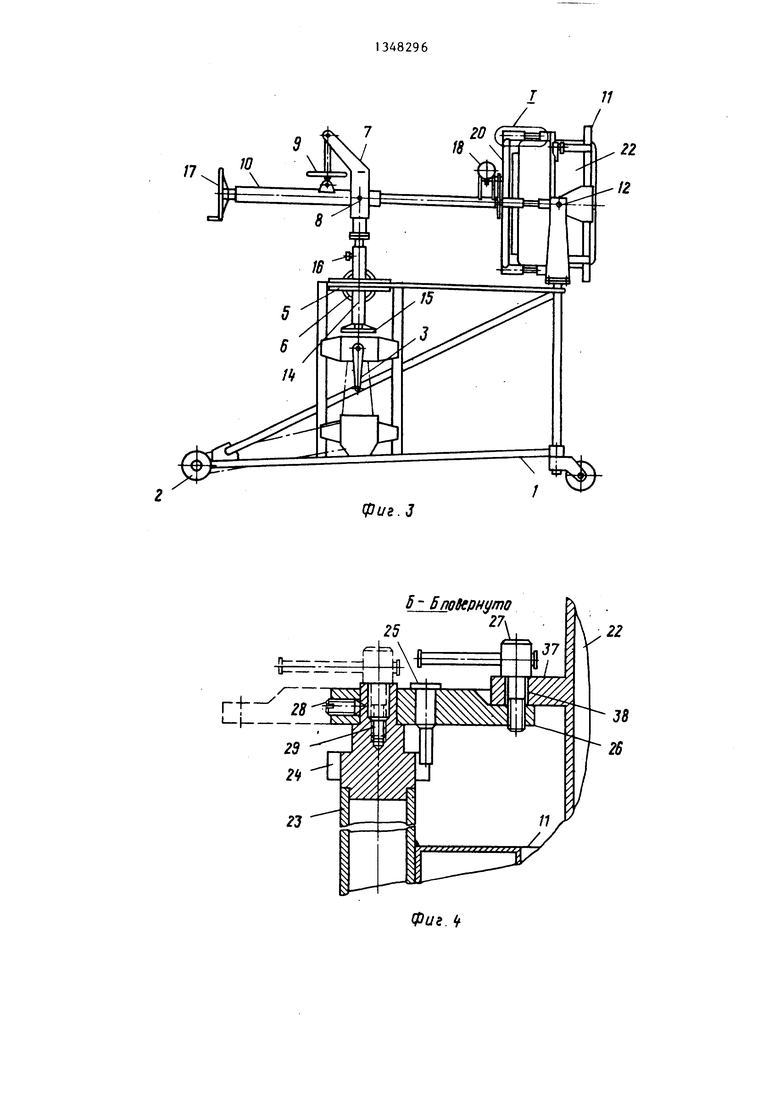
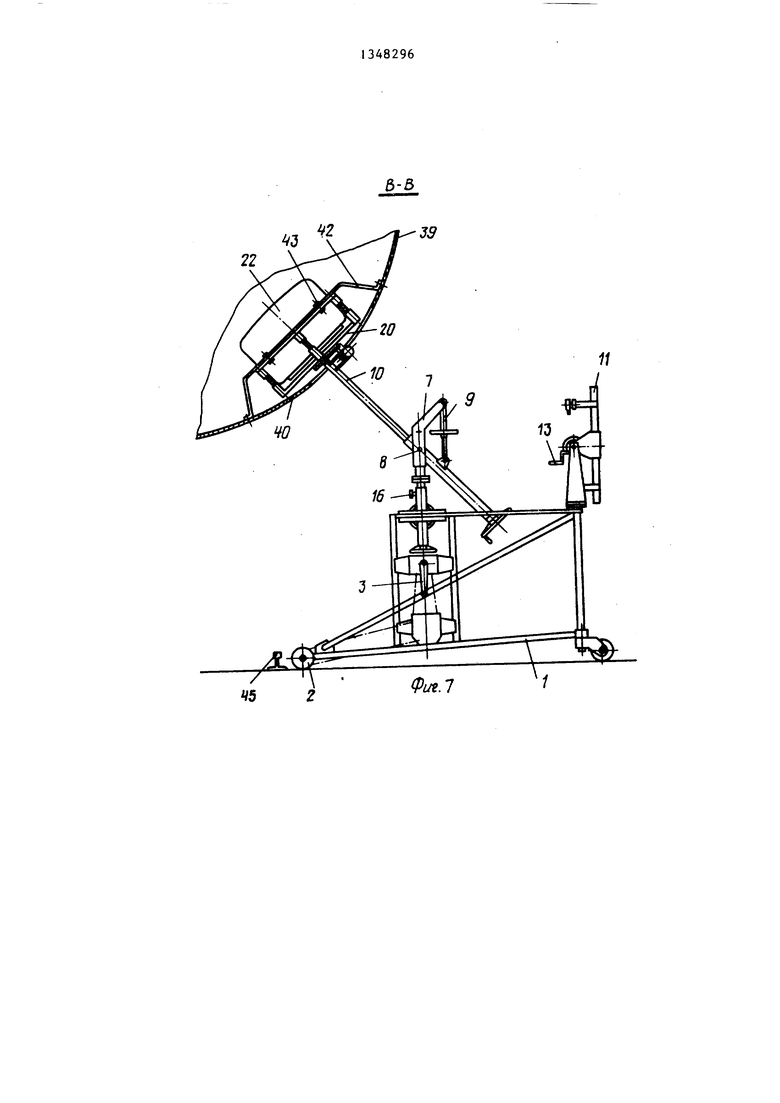
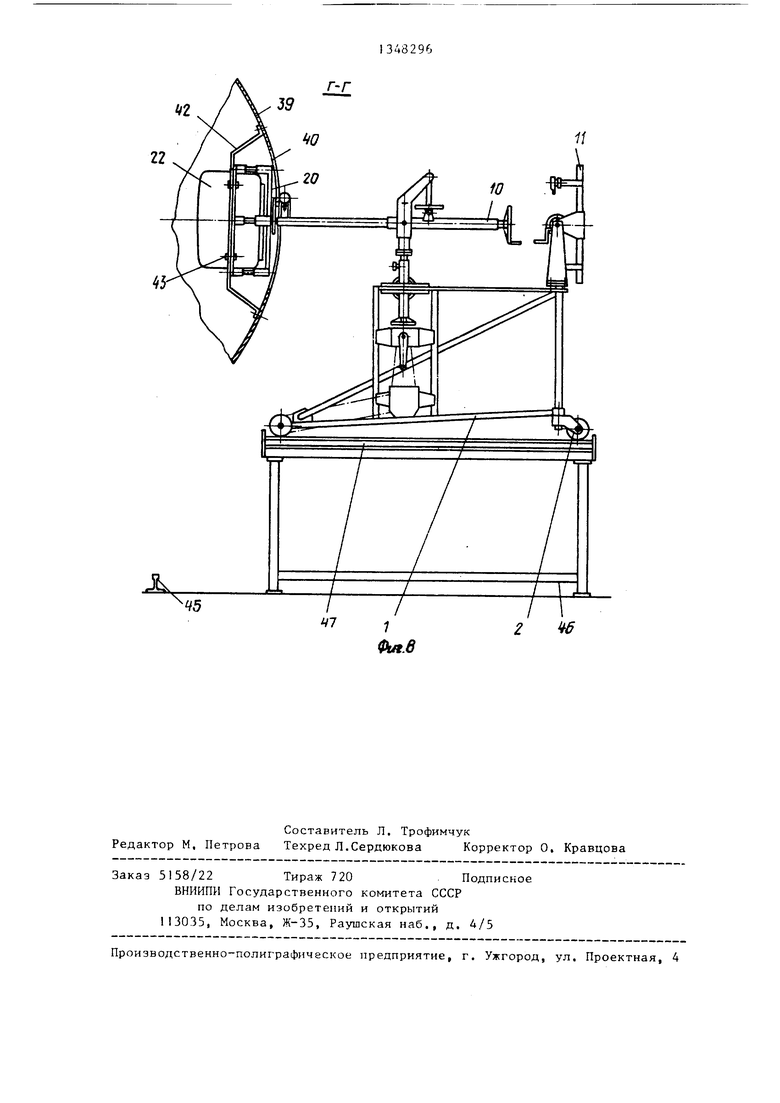
На фиг, 1 изображено устройство, общий вид (крепление груза на кольце); на фиг, 2 - вид А на фиг, 1; на фиг, 3 - устройство, общий вид (крепление груза на крестовине) ; на фиг, 4 - разрез Б-Б на фиг, 2 (узел крепления груза на кольце); на фиг, 5 - узел I на фиг, 3 (кронштейн крестовины); на фиг, 6 - схема монтажа грузов на изделии; на фиг, 7 - разрез В-В на фиг, 6 (наклонный монтаж груза); на фиг, 8 - разрез Г-Г .на фиг, 6 (горизонтальный монтаж гру
В процессе сборки изделия 40, на пример химического реактора, на нем
за).
Устройство состоит из рамы 1 с хо- 25монтируются различные грузы 22, тадовой частью 2 и приводом 3 продоль-кие как контейнеры с аппаратурой,
ного перемещения, установленной в по-блоки механизмов,
перечных направляющих 4 каретки 5 с Для проведения монтажа груз 22 приводом 6, стойки 7, на которой шарпри помопш траверсы, закрепляемой на резьбовых бобьщ1ках 39, устанавливают на узлы 21 кольца 11 (фиг, 1 2 и 4), При этом фланец 37 груза 22 опирается на пластины 26, Для крепления груза 22 на них из резьбовых отверстий 29 осей 23 снимают винты 27 и устанавливают в отверстие 38 и в резьбовые отверстия пластин 26,
нирно при помощи оси 8 и привода 9 наклона закреплена телескопическая .стрела 10, и кольца 11, закрепленного на раме 1 при помощи поперечной оси 12 с приводом 13,
Стойка 7 установлена в вертикальной направляющей 14, закрепленной на каретке 5 и взаимодействующей с приводом 15 и фиксатором 16, Телескопическая стрела 10 снабжена приводом
17 перемещения и приводом 18 вращения 40 90 вокруг поперечной оси 12 (фиг, 3),
относительно продольной оси 19 захватного органа, выполненного в виде крестовины 20,
На кольце I1 смонтированы четыре узла 21 крепления груза 22, выполненные каждый в виде оси 23 с пазами 24 под штифт 25, На оси 23 щарнир- но установлена пластина 26 с резьбовым отверстием под винт 27 и крепежПри помощи приводов вертикального 15 и поперечного 6 перемещений, а также привода 9 наклона совмещают продольные оси крестовины 20 и груза 22, 45 При помощи привода 17 крестовину 20 подводят к грузу 22, а при помощи привода 18 вращения совмещают продольные оси кронштейнов 32 с резьбовыми бобьшками 39, Винты 36 вывинчиным винтом 28, В торце оси 23 выпол- g вают из резьбовых отверстий 35 вту- нено резьбовое отверстие 29 для размещения винта 27,
лок 33 и завинчивают в резьбовые бо- бьшки 39 (фиг, 5), После этого винты 27 снимают с резьбовых отверстий пластин 26 и устанавливают их в резь
На крестовине 20 в четырех радиальных направляющих 30 с фиксаторами gg бовые отверстия 29 осей 23 (фиг, 4),
31 установлены кронштейны 32 с узлами крепления груза 22, Каждый узел крепления выполнен в виде втулки 33, взаимодействующей с фиксатором
Далее осуществляют монтаж груза 22 в нижней части изделия 40 (фиг, 6 и 7), Для этого при помощи привода 3 продольного перемещения раму 1 под
10
2082962
ЗА и снабженной резьбовым отверстием 35, и винта 36,
На грузе 22 вьшолнен фланец 37 с четырьмя равнорасположенными отверстиями 38 под винты 27 кольца 11 и четырьмя резьбовыми бобьппками 39 под винты 36 крестовины 20,
Грузы 22 монтируются на изделии 40 через люки 41 и закрепляются на ферме 42 при помощи болтов 43, Изделие 40 опирается на тележки 44, установленные на рельсы 45, Для горизонтального монтажа применяется под- 15 ставка 46 с продольными направляющими 47,
Привод 3 продольного перемещения выполнен цепного типа, приводы 6,9, 15 и 17 выполнены винтового типа, а приводы 13 и 18 - червячного типа.
Устройство работает следующим образом,
В процессе сборки изделия 40, например химического реактора, на нем
Для проведения монтажа груз 22
при помопш траверсы, закрепляемой на резьбовых бобьщ1ках 39, устанавливают на узлы 21 кольца 11 (фиг, 1, 2 и 4), При этом фланец 37 груза 22 опирается на пластины 26, Для крепления груза 22 на них из резьбовых отверстий 29 осей 23 снимают винты 27 и устанавливают в отверстие 38 и в резьбовые отверстия пластин 26,
Затем посредством привода 13 кольцо 1 1 с грузом 22 поворачивают на
При помощи приводов вертикального 15 и поперечного 6 перемещений, а также привода 9 наклона совмещают продольные оси крестовины 20 и груза 22, При помощи привода 17 крестовину 20 подводят к грузу 22, а при помощи привода 18 вращения совмещают продольные оси кронштейнов 32 с резьбовыми бобьшками 39, Винты 36 вывинчивают из резьбовых отверстий 35 вту-
лок 33 и завинчивают в резьбовые бо- бьшки 39 (фиг, 5), После этого винты 27 снимают с резьбовых отверстий пластин 26 и устанавливают их в резьДалее осуществляют монтаж груза 22 в нижней части изделия 40 (фиг, 6 и 7), Для этого при помощи привода 3 продольного перемещения раму 1 подрактеристиками. Для эюго на крестовине 20 кронштейны 32 выдвигаются по радиальным направляющим 30 и фиксируются при помощи фиксатора 31 (фиг, 5). Кроме того, втулки 33 вдвигаются в кронштейны 32 и фиксируются при помощи фиксаторов 34, а на кольце 1I ослабляются крепежные винты 28, вьтимаводят к люку 41 на боковой поверхности изделия 40. Снимают фиксатор 16, поворачивают на 180 вокруг вертикальной оси стойку 7 вместе с телескопической стрелой 10 и грузом 22 и устанавливают фиксатор 16. При помощи приводов вертикального 15 и поперечного 6 перемещений, а также
привода 9 наклона совмещают продоль- ю ются штифты 25 из внутренних пазов ные оси груза 22 и фермы 42. При по- 24, пластины 26 разворачиваются на мощи привода 17 груз 22 подводят к 180 наружу кольца 11, устанавлива- ферме 42, а при помощи привода 18 ются штифты 25 в н&ружные пазы 24 вращения совмещают продольные оси от- и закрепляются винты 28 (фиг. 4). верстий 33 фланца 37 и отверстий фер- 15 мы 42 и устанавливают в них болты 43.
После этого из резьбовых бобышек 39 вывинчивают винты 36 и завинчивают их в резьбовые отверстия втулок 33, Раму 1 при помощи привода 3 продоль- 20 раму с ходовой частью, установленную ного перемещения отводят от изделия в поперечных направляющих рамы каретку с приводом, на которой в вертикальной направляющей с приводом смонтирована стойка с шарнирно закрепленной 25 телескопической стрелой с захватным органом, отличающийся тем, что, с целью повьш)ения функциональных возможностей, он снабжен кольцом с узлами крепления груза.
Формула изобретения
1, Передвижной подъемник для монтажа тяжеловесных грузен, содержащий
40 и возвращают все элементы в исходное положение в обратной последовательности, -Таким образом осуществляется наклонный монтаж груза 20.
Для осуществления монтажа груза 22 в верхней части изделия 40 (в том числе и горизонтального монтажа) используется та же рама 1, что и для
наклонного монтажа, но с применением зо смонтированным на раме шарнирно с
13Д8296
рактеристиками. Для эюго на крестовине 20 кронштейны 32 выдвигаются по радиальным направляющим 30 и фиксируются при помощи фиксатора 31 (фиг, 5). Кроме того, втулки 33 вдвигаются в кронштейны 32 и фиксируются при помощи фиксаторов 34, а на кольце 1I ослабляются крепежные винты 28, вьтимаются штифты 25 из внутренних пазов 24, пластины 26 разворачиваются на 180 наружу кольца 11, устанавлива- ются штифты 25 в н&ружные пазы 24 и закрепляются винты 28 (фиг. 4).
раму с ходовой частью, установленную в поперечных направляющих рамы каретку с приводом, на которой в вертикаль ной направляющей с приводом смонтирована стойка с шарнирно закрепленной телескопической стрелой с захватным органом, отличающийся тем, что, с целью повьш)ения функциональных возможностей, он снабжен кольцом с узлами крепления груза.
Формула изобретения
1, Передвижной подъемник для монтажа тяжеловесных грузен, содержащий
35
подставки 46 (фиг. 6 и 7), при этом подставка 46 может устанавливаться как со стороны боковой поверхности изделия 40, так и со стороны его торца (с опиранием на рельсы 45).
Демонтаж грузов 22 с изделия 40 производится в обратной последовательности.
Предлагаемое устройство позволяет монтировать (демонтировать) грузы 22 Q и фиксации в плоскости, параллельной с различными габаритно-массовыми ха- плоскости кольца.
Вид О
/J 6
возможностью вращения при помощи привода в продольной вертикальной плоскости .
2. Подъемник по п. 1, от л и - чающийся тем, что каждый узел крепления груза выполнен в виде пластины, шарнирно закрепленной на кольце с возможностью поворота
35
Q и фиксации в плоскости, параллельной плоскости кольца.
возможностью вращения при помощи привода в продольной вертикальной плоскости .
2. Подъемник по п. 1, от л и - чающийся тем, что каждый узел крепления груза выполнен в виде пластины, шарнирно закрепленной на кольце с возможностью поворота
Фиг. 2
/7
фиг. 3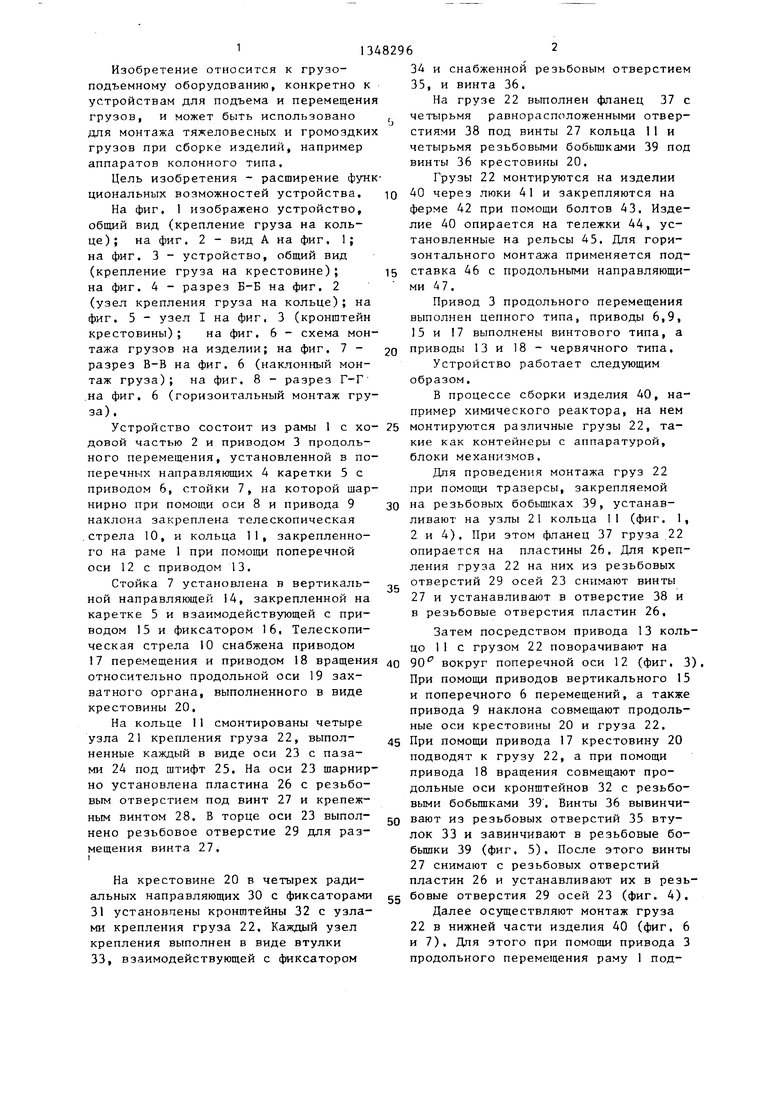
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| СУДОВОЙ ПОДЪЕМНИК | 2012 |
|
RU2497743C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |
| УСТРОЙСТВО И СИСТЕМА ЭКСТРЕННОГО СПУСКА ИЗ ЗДАНИЯ | 2005 |
|
RU2274481C1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| Мобильная буровая установка | 2016 |
|
RU2647522C2 |
| Мачтовый подъемник | 1991 |
|
SU1789485A1 |
| Кран для подъема и подачи грузов в оконный проем здания | 1988 |
|
SU1673500A1 |
| Крепежно-доставочное устройство | 1981 |
|
SU1017799A1 |
| КАМНЕОБРАБАТЫВАЮЩИЙ СТАНОК НА АЭРОСТАТИЧЕСКИХ ОПОРАХ | 2007 |
|
RU2347676C2 |
Изобретение относится к грузоподъемному оборудованию. Цель изобретения - расширение функциональных возможностей подъемника. Подъемник содержит раму 1 с ходовой частью 2 и приводом 3 продольного перемещения. установленную в продольных направляющих каретку 5 с приводом 6, стойку 7, на которой шарнирно при помощи оси 8 и привода 9 наклонно закреплена телескопическая стрела 10, и кольцо 11, смонтированное на раме 1 при помощи поперечной оси 12 с приводом. Стойка 7установлена в вертикальной направляющей 14, закрепленной на каретке 5, взаимодействующей с приводом и фиксатором 16, Телескопическая стрела 10 снабжена приводом 17 перемещения и приводом 18 относительно продольной оси 19 захватного органа, выполненного в виде крестовины 20. 1 з.п. ф-лы, 8ил. i (Л // Фаг.1
S - бпоКРнуто
-
г-
Фиг. It
22
Фиг. 5
ЦЦ
J
22
11
Ф1Л.7
г-г
чг
22
ii
| Устройство для установки полого цилиндрического изделия в контейнер | 1977 |
|
SU672151A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
