Известные стереоавтографы построены на оптикомеханической засечке на плоскости.
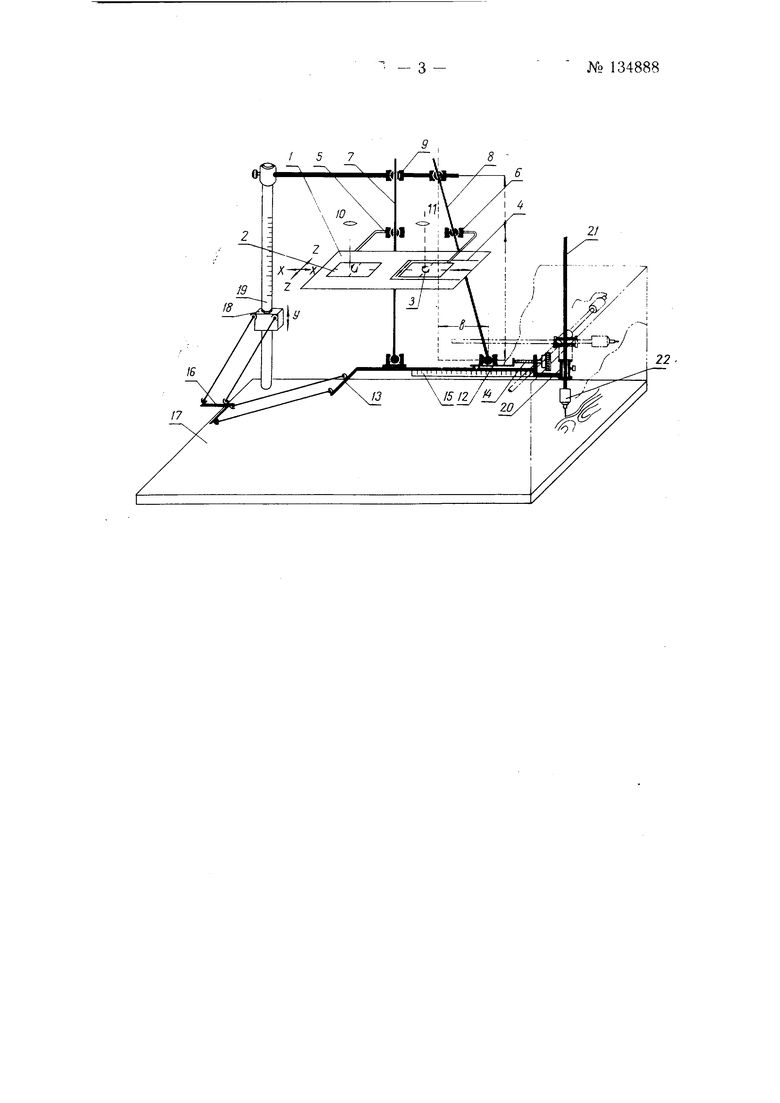
Предлагаемый малоформатный стереоавтограф отличается от известных тем, что дает возможность осуществить пространственную оптккомеханическую засечку и разрешает рисовать одновременно три проекции моделина три взаимпо-перпенднкулярные плоскости. Это достигается тем, что он снабжен базисной пространственно перемещающейся кареткой, повторяющей в соответствующем масп1табе положение точек стереомоделиНа чертеже дана кинематическая схема пред.1аглемого стереоавгаграфа.
Основная каретка /, несущая снимки, может передвигаться в горизонтальной плоскости в двух взаимно-перпендикулярных направлениях X - X и Z - Z. Левый снимок 2 может вращаться вокруг главной точки снимка в горизонтальной плоскости по отнощению к основной каретке. Правый снимок 3 имеет следующие движения относительно основной каретки: вращение вокруг главной точки линейное вперед-назад (вертикальный параллакс), вправо-влево по направляющей (горизонтальный параллакс).
Основная каретка 1 жестко связана с щарнирным подщипником 5. Параллактическая каретка, в которой находится правый снимок 3. жестко связана с щарнирным подщипником 6. Сквозь указанные щарнирные подщипники 5 и б на скольжении проходят соответственно направляющие 7 и S, верхний конец которых также на скольжении проходит сквозь щарнирные подщипники 9. Центры последних находятся на постоянном расстоянии друг от друга по горизонтальной линии и равны базису наблюдательной оптической системы 0 и 11. Шарнирные подщипники 9 являются центрами вращения направляющих 7 и S, жестко
№ 134888 - 2 --связаны с корпусом прибора и могут передвигаться по вертикали только при установке величины фокуса съемочных камер.
Расстояния между шарнирными подшипниками .--6 и 9-5 по вертикали постоянны и равны фокусу съемочных камер.
Нижние концы направляюш,их 7 и 8 жестко связаны с внутренним кольцами шарнирных подшипников J2.
Левый шарнирный подшипник /2 неподвижно связан (наружно кольцо подшигшика) с базисной, пространственно передвигаюш,ейся кареткой 13. Правый шарнирный подшипник 12 может передвигаться вдоль базисной линии базисной каретки, передвижение осуществляется микрометрическим винтом 14, величина передвижения фиксируется ня шкале 75. Разница между расстояниями центров подшипников 12 и базпсом наблюдательной системы, как показано на схеме, равна базису съемки в выбранном масштабе (в)Базисная каретка 13 соединена с легко подвижным шарнирным механизмом 16, состоящим из двух параллелограммов. Такой механизм позволяет перемещать базисную каретку параллельно самой себе в горизонтальной п.гюскости.
Горизонтальная плоскость 17 (основание прибора) представляет собой планшет с бумагой для рисования.
Другой конец шарнирного двойного параллелограмма 16 соединен с кареткой 18, которая легко может перемещаться по неподвижной вертикальной штанге 19, на которой нанесена шкала высот. Как видно из рисунка, расстояние по вертикали между центрами подшипников 5 и 12 будет равно расстоянию /у в выбранном масштабе обработки.
На свободном конце базисной каретки 13 находится втулка 20, и которой на скольжении ходит вертикальная штанга 21, несущая карандаш 22. Таких втулок с подвижными штангами и карандашом можно установить одновре.менно три, в трех взаимно-перпендикулярных направлениях (как показано пунктирными линиями на чертеже). Таким образом, прп необходимости можно получит) проекцию предмета одновременно на три взаимно-перпендикулярпые плоскости.
11 ) е д мет и 3 о б J) е т е и и я
Малоформатный стере()авто1-раф, вьию.ппепньп в виде каретки с круговыми кассетами, двух построительных направляющих, базисной каретки с карандашом и бинокуляра, отличающийся тем, что, с целью осуществления пространственной оптикомеханической засечки, оп снабжен базисной пространственно перемешаюп1ейся кареткой, повторяющей в соответствующем масштабе положение точек стереомодели. изображаюпщхся одновременно в трех плоскостях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕРЕОАВТОГРАФ | 1971 |
|
SU300761A1 |
| УНИВЕРСАЛЬНЫЙ | 1971 |
|
SU315922A1 |
| СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР ДЛЯ ОБРАБОТКИ СНИМКОВ ФОТОТЕОДОЛИТНОЙ СЪЕМКИ | 1972 |
|
SU323655A1 |
| УНИВЕРСАЛЬНЫЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ | 1973 |
|
SU382919A1 |
| Топографический проектор | 1960 |
|
SU135238A1 |
| СТЕРЕОКОМПАРАТОР | 1967 |
|
SU199433A1 |
| Стереотрансформатор | 1948 |
|
SU83798A1 |
| Стереоскопический перспектограф | 1959 |
|
SU127819A1 |
| СТЕРЕОАВТОГРАФ | 1971 |
|
SU309241A1 |
| СТЕРЕОКОМПАРАТОРii44S»Rf-'iG'^i t^KA | 1971 |
|
SU322616A1 |