Изобретение относится к универсальным стереофотограмметрическим приборам механического тииа.
Известны стереофотограмметрические ириборы механического типа с ирименением иростраиствеииых рычажных механизмов.
Современный универсальный стереофотограмметрический прибор 1 класса точности должен обеспечивать измерение иревышеиий точек модели местности со среднеквадратичной ошибкой не более 1/15000-1/20000 высоты фотографирования. Создание такого прибора для снимков большого фор.мата но существующим схемам рычажных пространственных механизмов чрезвычайно сложно и нрактически неосуществимо по следующим основным причинам: увеличение формата с имков в 2 раза приводит к увеличению габаритов прибора в 2 раза, а веса прибора и его звепьев в 6-8 раз; увеличение веса кареток и других осиовиых деталей зиачительно увеличивает уиругие деформации (прогибы) направляющих и других несущих деталей, а также снижает кинематическую точность ирпбора; увеличение раз.меров нрецизионных деталей (рычагов, направляющих и т. д.) зиачительно снижает их точность и создает технологические трудности при их изготовлении.
наклона до 12°, размером кадра до 30x30 слг ири у.еньшенпи габаритов стереофотограмметрической аппаратуры.
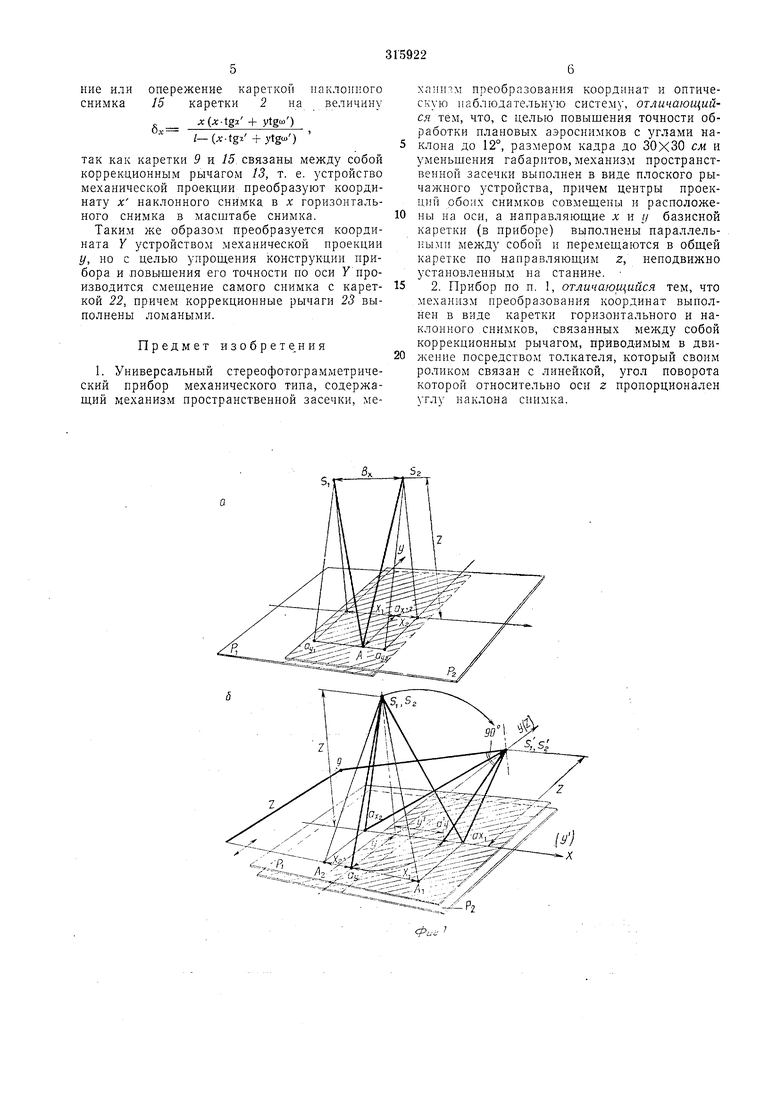
Цель достигается гем, что yi-гиверсальный стереофотограм.метрическнй прибор выполня)от в виде плоских рычажнь х механизмов; он состоит из мexaнJiз :a пространственной засечки, двух устройств механической проекции снимков, оптической наблюдательной системы, координатографа и ряда вспомогательных устройств. В описываемом приборе прпмсняют обратнхю про тпаиственную засечку «с прообразованным связками, когда )аклонный снимок предварительно трапсфор.мируют устройством .механической проекции снп.мка, выполненным в виде плоской системы рычагов, преобразуюпщх координаты горизонтальной точки наклонного сннмка в соответствующие этой точке координаты горизонтального снимка. При этом иросгранствеиное иоложенне точки %;о.1,ели местности оиределястся пересечением четырех проектпруюЩ1 плоскостей, причем Henipi i проекций обоих с :нмков совмепюны и расположены на оси, а наиравляюнще .v и у базисной каретки выполнены параллельными между собой и иеремещаются Б общей каретке но направляющим г, неподвижно устаиовлеиным на станнне. полнеп в виде каретки горизонтального и наклонного снимков, связанных между собой коррекционным рычагом, приводимым в движение посредством толкателя, который своим роликом связан с линейкой, угол новорота которой относительно оси г нропорционален углу наклона снимка. Сущность изобретения поясняется чертежами, где на фиг. 1 приведена схема пространственного положения проектируюндих лучей в момент съемки, на фиг. 2 показана кинематическая схема устройства механической нроекции снимка, а на фиг. 3 - кинематическая схема описываемого стероофотограмметрического нрибора. Снимки Pi и PZ (фиг. 1) образуют стерсонару (зона перекрытия заштрихована), а положение произвольной точки А определяется пересечением проектирующих лучей AS, ASz- Расстояние между цеитралш проекций Si и Sg - базис фотографирования BX. Если совместить центры проекций S и So (фиг. .16), а следовательно и спимки, то положение сопряженных точек /Ь и А-у на двух снимках (Р и PZ определяется, как и в моменг фотографирования, положепием проектирующих лучей iSi и AzS-, нричсм координаты Хь Xz и У1,2 такие же, как и в случае la. Положение каждого проектирующего луча можно определить как линию пересечения двух проектирующих плоскостей, проходящих через центр проектирования и линни ординат и абсцисс точки. Пересечение нроектирующих плоскостей с коордипатной плоскостью XZ моделируется плоскими линейками flxi Si, Ox, S2, a с координатной плоскостью yZ-линейками ayi Si, . Совместив плоскость объектива с плоскостью снимков, по-прежнему рычагами и Sjux, можно моделировать абсциссы произвольной точки стереопары при неизменном значении Х -}-Х2 , а развернув плоскость YZ до совпадения с плоскостью XZ и затем с плоскостью снимков - системой рычагов а g (в случае &j/ 0). Таким же образом: a 90°, - можно g, где угол моделировать ее ординаты. Из геометрии снимков известна зависимость между координатами наклонного и горизонтального снимков: сч л; (jc-slnj ) . у (x&iny -- vshiM)) /- (xslm + yslnw) /- (. + sln) где X, у - координаты горизонтального снимка относительно точки нулевых искажений, а. (Л - углы наклона снимка, / - фокусное расстояние снимка, б., б,, - разность координат горизонтального и накло 1ного снимков. Из геометрии механизма (фиг. 2) легко определитьУ (tgg -г )0 /-(Sftga +;tgi«) где а , ш - углы наклона вспомогательной плоскости (линеек в приборе); I - постоянная механизма. При сравнении формул (I) и (II) очевидно, что при ностоянных для любой точки данного снимка а, со и / механизм, построенный по схеме фиг. 2, строго рещает задачи перспективного преобразователя координат сонряже П:ых иаклонного и горизонтального снимков. Описываелгый универсальный стереофотограмметрпческий прибор (фиг. 3) состоит из базисной каретки /, перемещаюптейся по направляющим 2, (Z) в кольцевой отливке которой укреплены направляющие X А Y. По паправляющим X я Y базисной каретки перемещаются на нрецизионных подшипниках каретки 3(Х) и 4(Y), которые несут на себе направляющие и каретки 5(Ьх} и 6(b,j) с установочными винтами. Смещением кареток 5 друг относительно друга устанавливается заданное значение базиса фотографирования b,f, а кареток 6 - значение Ь,/. Каждая из кареток 5 и 6 имеет одноосный щарнир и муфту с подшипниками, с помощью которых соединяется шарнирно с соответствующей проектирующей линейкой 7 или 8. Линейки 7 и S моделируют положение проектирующих плоскостей механизма пространственной засечки. Линейку 7 охватывает муфта щарнира каретки горизонтального снимка 9, перемещающаяся но направляющим 10. Одновременным перемещением четырех гпарниров кареток по паправляющим 11 устанавливается фокусное расстояние прибора. На каретке горизонтального снимка 9 установлена еще одна направляющая - направляющая толкателя 12 коррекционного рычага 13. Направляющая каретки наклонного снимка М нараллельна направляющей 10. Коррекционный рычаг 13 средним щарниром соединяется с неподвижной осью на станине прибора, нижним - с кареткой наклонного снимка 15, а третьим - с толкателем 12. Толкатель 12 своим роликом катится по наклонной линейке 16, которая, кроме наклона на угол, пропорциональный углу наклона снимка, перемещается на величину, пропорциональную г/tgco по направляющей 17. Смещение, пронорциональное ytgo/, вырабатывается аналогичным устройством ветви У и передается на направляющую 17 рычагом 18. Таким образом, толкатель 12 смещается па величину h, пропорциональную сумме л-tga+y tgo). Величина xiga, в свою очередь, передается рычагом 19 на ветвь У с линейки 20, которая под действием толкателя 21 смещается на величину, пропорциональную X tga.
ние или опережение кареткой наклонного снимка 15 каретки 2 на величину
xjx-ig + ytgo))
/-(.tgz+ytga )
так как каретки 9 и 15 связаны между собой коррекционным рычагом 13, т. е. устройство механической проекции преобразуют координату X наклонного снимка, в х горизонтального снимка в масштабе снимка.
Таким же образом преобразуется координата У устройством механической проекции у, но с целью упрощения конструкции прибора и повышения его точности по оси У производится смещение самого снимка с кареткой 22, причем коррекционные рычаги 23 выполнены ломаными.
Предмет изобрете ния
1. Универсальный стереофотограмметрический прибор механического типа, содержащий механизм пространственной засечки, механитм преобразования координат и оптическую наблюдательную систему, отличающийся тем, что, с целью повышения точности обработки плановых аэроснимков с углами наклона до 12°, размером кадра до 30x30 см и уменьшения габаритов, механизм пространственной засечки выполнен в виде плоского рычажного устройства, причем центры проекций обоих снимков совмещены и расположены на оси, а направляющие х и у базисной каретки (в приборе) выполнены параллельlibi.Mii между собой и перемещаются в общей каретке по направляющим z, неподвижно установленным на станине.
2. Прибор по п. 1, отличающийся тем, что механизм преобразования координат выполнен в виде каретки горизонтального и наклонного снимков, связанных между собой коррекционным рычагом, приводимым в движение посредством толкателя, который своим роликом связан с линейкой, угол поворота которой относительно оси z пропорционален углу наклона снимка.

| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР ДЛЯ ОБРАБОТКИ ПЛАНОВЫХ АЭРОСНИМКОВ | 1971 |
|
SU318815A1 |
| Стереопреобразователь | 1955 |
|
SU110486A1 |
| УНИВЕРСАЛЬНЫЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ | 1973 |
|
SU382919A1 |
| Фототрансформатор | 1982 |
|
SU1081415A1 |
| СТЕРЕОАВТОГРАФ | 1971 |
|
SU300761A1 |
| Универсальный стереофотограмметрический прибор | 1976 |
|
SU606101A1 |
| ПРИБОР ДЛЯ ОБРАБОТКИ СТЕРЕОПАР | 1968 |
|
SU221327A1 |
| ПРИБОР ДЛЯ СТЕРЕОФОТОГРАММЕТРИЧЕСКОЙ ОБРАБОТКИ АЭРОСНИМКОВ | 1948 |
|
SU79204A1 |
| СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1970 |
|
SU284323A1 |
| Стереофотограмметрический прибор | 1979 |
|
SU808843A1 |

S,
их . 5г
