ИзОбретение относится к области стереофотолрамметрии и шреднавначено для получения по стереоиаре фотограмметричеоких снИМков изображения поверхаости объекта съемки в )гонально-осевой троекции на развернутой в плоскость боковой поверхности цилиндра.
Известные стереофотограмметрические приборы предназначены для получения изображения поверхности объекта в ортогональной проекции, которая не позволяет шолучить удовлетворительного изображения таких объектов, как, например, боковая поверхность тун.неля, ствола шахты и т. п.
Устранение указанных недостатков достигается применением в ортогонально-осевом стереоавтографе узла осевой развертки, ПОЗволяющего получить объект съемки в ортогонально- осевой прюекЦИи на развернутой в ПЛОСКОСТЬ боковой Поверхности цилиндра. Узел осевой развертки выполнен в виде связанного со счетчи1ком углов и чертежным устройством ведущего вала, по которому перемещается каретка с направляющей, перпендикулярной оси ведущего вала. На этой направляющей установлена каретка ведуще по ролика, который шарнирно связан с линейкой наиравлений стереоавтографа щ криволинейной направляющей, каждая тачка которой удалена от оси развертки на расстояние, равное
на
180° а - угловая величина разве)ртываемой в 1прЯМую дуги окружности радиуса г с центром, совпадающим с осью развертки.
Ортогонально-осевой стереоавтограф значительно расщиряет область применения стереофотограмметрии, так как во многих случаях позволяет получать измерительные графи0ческие документы объектов, не изображаемых в щироко трннятой ортогональной проекции. Он (позволяет также получать измерительные шанорамы местности или каких-либо объектов.
5
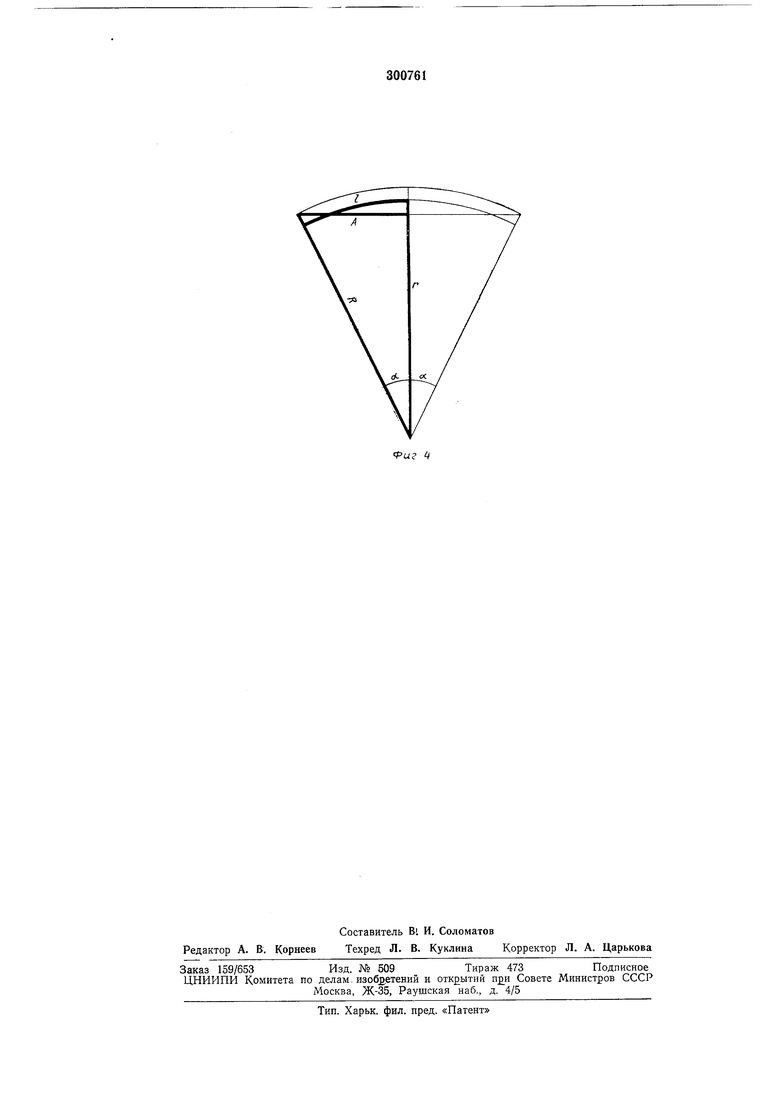
На фиг. 1 изображена схема ортогональноосевого пробктирования Объекта съемки иа развернутую в плоскость боковую /поверхность цилиндра; на фиг. 2 - схема узла (пространственной засечки и узла осевой развертки ортогонально-осевого стереоавтографа; на фиг. 3 - схема узла ортогональной развертки; на фиг. 4 - схема развертки дуги окружности в прямую.
5 В предложенном стереоавтографе объект съемки получают в ортого-нально-осевой проекции На развернутой в плоскость боковой поверхности цилиндра. Ортогонально-осевая гароекция - это случай двухосевого Проектилевии ортогональная, а во втором, периендикулярно-м к первому - осевая. При ортогонально-асевом проектировании на noiBepx«ость цилиндра С (см. . 1) координатами точек являются полярный угол а, заключенный между начальной плоскостью РО и плоскостью PJV, полярное 1расстояние DN от оси проекции SS (ПО перпендикуляру до то1Ч1ки N и высота Zff от начальной плоскости Но. Положение точки на развернутой в плоскость боковой поверхности цилиндра определяют координаты а и ZK, а координата Off становится в проекции числовой отметкой.
Ортогонально-осевой стерео автограф служит для оитико-механического построения по стереопаре ортогонально-осевой проекции точек объекта на цилиндрической картине.
Он состоит из стереокомпараторной части механизма пространственной засечки и чертежного устройства.
Стереокомпаратор состоит из левой KL и правой KR кареток для закрепления в них фотограмМетрическИХ снимков и бинюкулярной системы / с измерительными марками ML
и MR.
Механизм провстранственной засечки содержит линейку основную Ло линейку паралактичеоную ЛР, мост отстоящий МО.
Узел осевой развертки состоит из криволинейной направляющей Нос и каретки /Сое с роликом 2.
Узел ортогональной развертки содержит линейку высот /7z и каретку высот Kz z
Чертежное .устройство состоит из моста высот и каретки с щанговым карандашом, перемещающейся по мосту высот.
Ортогонально-осевой стереоавтограф работает следующим образом.
Движен1ие от штурвала Ша через каретку /С ос и ролик 2, перемещающийся по направляющей Яос, передается па линейку Лд. Последняя, вращаясь вокруг неподвижной вертикальной оси развертки О|, перемещает через шарнир 3 и базисную каретку Кв мост отстояЛдг
НИИ МО (ПО дуге окружности с радиусом--
на угол а и через ролик 4 коротки1М плечом, соответствующим фокусному расстоянию съемочной камеры /к, каретку KL стерео,компаратара на величину XL Мост отстояний МО через ролик 5 приводит в движение линейку ЛР, которая, вращаясь вокруг неподвижной вертикальной оси Оа, коротким плечом, со.ответст1Бующ1им /х снимка, через ролик 6 перемещает каретку стереокомпаратора на величину 2- Одновременно мост отстояний через каретку высот /(z и ролик 7 (фиг. 2 и 3) передает движение на линейку Лг, которая вращаясь вокруг неподвижной верти1кальной оси Оз, коротким плечом, соответствующим /к снимка, через ролик 8 перемещает подвижную часть бинокулярной системы / на величину
Zi, Линейка высот Дг, кроме того, приводится в движение щтурвалом UIz (см. фиг. 3).
Необходимое 1пол1ожение моста отстояний МО достигается «ращением ножного диска Дн 1ИЛИ установка его на заданную величину выполняется вращением иальца Шо.
То положение, когда измерительная марка стереоскапически наведена на определяемую точку модели объекта: марка ML на точку ni и марка MR на точюу «2, соответствует моменту иространственной засечки этой точки в масшпгабе обработки стереанары, который задается усгганоекой на базисной каретке Кв собу 5v
5 ставляющих базиса съемки В
и-.где
m знаменатель масштаба обработки пары. При этом СО счетчи1ков СЧа, СЧ и C4z могут быть считаны цилиндрические координаты (например, для точки Л соответственно ад-,
Лдг 2„
---И- ). Результат ортогонально-осевого т т
проектирования графически фиксируется с помощью чертежнОГО устройства, на которое через карданы /СДа и KMz передаются движения соответственно от штурвалов Ша и UIzЧисловая отметка для (полученной точки считывается со счетчика СЧ и в необходимых 1СЛучаях подписывается у точки.
Поверхность объекта может быть также графически изображена изолиниями, которыми в данном случае Я1вляются следы сечения
5 объекта поверхностями KOHHeHTpi qeoKHX цилиндров с осью, проходящей через точ1ку фотографирования левой камеры. Это достигается стереоскопическим ведением марки по поверхности объекта. Марка при заданных положениях моста отстояний МО приводится в движение штурвалами Ша и Шг.
Кривизна направляющей Яос узла осевой развертки 1выбрана такой, что расстояние R каждой точки ее до оси развертки (фиг. 1) задано для соответственного угла а, исходя из равенства
р - °
180°sina
отношение длины окружности к диагде - метру.
Это условие обеапечивает развертку дуги окружно сти радиуса г в прямую. В самом деле, харда 2Л (фиг. 4) и длина дуги 21, стяги5 вающие центральный угол 2 а, соответственно равны:
2Л ,
or 2тс-2а
о/ -г
360° A R sina,
При условии, что А - 1 ira
R
Предмет изо б р е т е н |и я
Стереоавтограф, содержащий стереокомпаратор, механизм простраиственной засечки, узел ортогОНальной развертки и чертежное устройство, отличающийся тем, что, с целью, получения по стереопаре ортогонально-осевой проеиции объекта на развернутой в плоокость боковой (Поверхности -цилиндра, он снабжен узлх)м осевой развертки, выполненным в виде
связанного со счетчиком углов и чертежным уст1ройст1вом ведущего вала, по которому перемещается каретка с на1правляющей, периендикулярной оси ведущего вала, иа которой установлена «аретка ведущего ролика, щарнирно связанного с линейкой направлений и криволинейной направляющей, каждая точка которой удалена от оси развертки на расстояние, равное
тга
180°sina
где а - угловая величина развертываемой в орямую дуги окружности радиуса г с центром, совпадающим с осью развертки.

| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальный стереоавтограф | 1960 |
|
SU134450A1 |
| СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР ПЛОСКОГО ТИПА ДЛЯ ОБРАБОТКИ АЭРОСНИМКОВ И СНИМКОВ НАЗЕМНОЙ | 1966 |
|
SU188044A1 |
| СТЕРЕОАВТОГРАФ | 1971 |
|
SU309241A1 |
| СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР ДЛЯ ОБРАБОТКИ СНИМКОВ ФОТОТЕОДОЛИТНОЙ СЪЕМКИ | 1972 |
|
SU323655A1 |
| Чертежный прибор для составления планов наземной стереофотосъемки | 1958 |
|
SU122288A1 |
| УНИВЕРСАЛЬНЫЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР ДЛЯ ОБРАБОТКИ ПЛАНОВЫХ АЭРОСНИМКОВ | 1971 |
|
SU318815A1 |
| Прибор для развертки орбитальных панорам | 1977 |
|
SU672487A1 |
| Способ развертки орбитальных панорам | 1977 |
|
SU678292A1 |
| Малоформатный стереоавтограф | 1960 |
|
SU134888A1 |
| УНИВЕРСАЛЬНЫЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ | 1973 |
|
SU382919A1 |

.Я00761
o uoooeooaftoofiooooeooooooooa
-Hoc
Фиг 2Шд
