Изобретение относится к машиностроению и может быть использовано в приводах машин.
Цель изобретения - ,ение KOI;- струкции, достигаемое за счет того, что шатун не пересекает осей вращения коромысел, и валы коромысел поэтому мог ут выполняться неколенчатыми, в результате чего, так как шатун работает только на растяжение, снимаются повышенные требо- ва}шя к точности изготовления и сборки привода, а из условия работы и1атуна то;1ь- ко на растяжение он может выполняться в виде гибкой связи.
На фиг. 1 изображена принципиальная схема рекуператора механической энер1-ии; на фиг. 2 - кинематическая схема, пояс- няюш,ая работу привода.
Рекуператор содержит маховик-аккумулятор 1, приведенную маховую массу 2, имитируюш,ую движуш,ую машину и привод, соединяюыдий их и выполненный в виде двух коромысел 3 и 4 и шатуна 5. При этом длина шатуна 5 меньп1е межцептрового расстояния коромысел 3 и 4. МахоЕ5ИК- аккумулятор 1 соединен с коромыс.аами .3 и 4 посредством муфт 6 и 7 через редукторы 8 и 9. Шатун 5 .может быть выполнен в виде гибкой связи.
Рекуператор механической унергии работает следующим образом.
В исходном положении масса 2 непо;;- вижна, муфты 6 и 7 отклю спы, маховик-аккумулятор 1 вращается с зяда1.чой угловой скоростью, коромысло 4 находится в крайне.м положении (исходное ние показано на фиг. 2 основными линиями). В этом по.южении перел.аточное отношение между кором1з1сла.ми .1 и - бесконечности.
Для перемещения приведогной Macctj 2 из одного крайнего положепия исходного) в другое, обозначенное на фиг. 2 1птри- хоБЫми линиями, сцепные мусрты 6 и 7 включаются, при этом коромысло 3, движимое маховиком-аккумулятором i в направлении, показанном на фиг. 2 стрелкой, тянет за собой шатун 5, разгоняя коромысло 4 и связанную с ним нриведениую массу 2 в направлении, указанном на фиг. 2 второй стрелкой. При этом передаточное отношение между коромысла.ми 3 и 4 изменяется от бесконечности в исходном положении до ноля в положении, обозначенном на фиг. 2 тонкими линия.мн. В этом положении коро.мысло 4 и приведен|1ая масса 2 разогнаны до максимальной скорости, а коромысло 3 и отдавший всю свою кинетическую энергию ма.ховик-аккумулятор I останавливаются. Далее приведенная мае
0
са 2, продолжая двигаться по инерции, становится ве;;,уп|им звеном и, отдавая свою кинетическую энергию, через коромысло 4 тянет 1патун о, разгоняя коромысло 3 и ма.ховик-аккумулятор i в направлении, противоположном первоначально.му. При этом передаточное отношение между коромыслами 4 и 3 изменяется от бесконечности до ноля. Е5 конечном положении, обозначенном на фиг. 2 штриховыми линиями, маховик-аккумулятор 1 имеет максимальную угловую скорость, а приведенная масса 2, отдавшая ему всю свою кинетическую энергию, останавливается. Муфты 8 и 7 отключаются, и нроцесс нрекрещается. Таким образом, приведенная масса 2 из одного крайнего положения переводится в другое, при этом шатун 5 во всех фазах движе- работает только па растяжение и не пересекает осей вращения коромысел 3 и 4.
Величина . поворота приведенной массы 2 регулируется передаточпым отношением редуктора 9. Редуктор 8 служит для выравнивания моментов инерции маховика- аккумулятора : и приведенной массы 2, позволяя приме1-1ить малогабаритный быстро- вращающийся .маховик-акку.мулятор 1.
Изобретение yriponiaeT конструкцию рекуператора, так как 5 в рекуператоре пе пересекает осей вращения коромысел 3 и 4, и валы коромысел 3 и 4 могут быть вьпюлнены неколенчатыми. Ша- rvn 5 мо.жет бьггь менее .металлое.мки.м, так как от него не требуется жесткости для работы на сжатие. Кроме того, нри исполнении 1натуна в виде гибкой связи, например в виде отрезка стальной леЕГгы, снимаются повышенные требования к точности изготовления и сборки привода, так как неточности могут компенсироваться податливостью 1патуна.
Таким образом, шагун 5 работает только на растяжение, благодаря чему унроща-ется конструкция рекуператора.
Формула изобретения
0
5
1. Рекуперат ор механической энергии, со тержащий маховик-аккумулятор, приве- л.енную маховую массу, имитирующую -45 движуигуюся машину, и привод, соединяю- Н1.ИЙ их и выполненн1 1Й в виде двух коромысел и inaTyiia, отличающийся тем, что, с целью упрощения конструкции, длина щртуна .меньще межцентрового расстояния коромысел.
50
2. Рекуператор но п. 1 тем, что н;атун вынолнен связи.
отличающийся а виде гибкой
fas. 2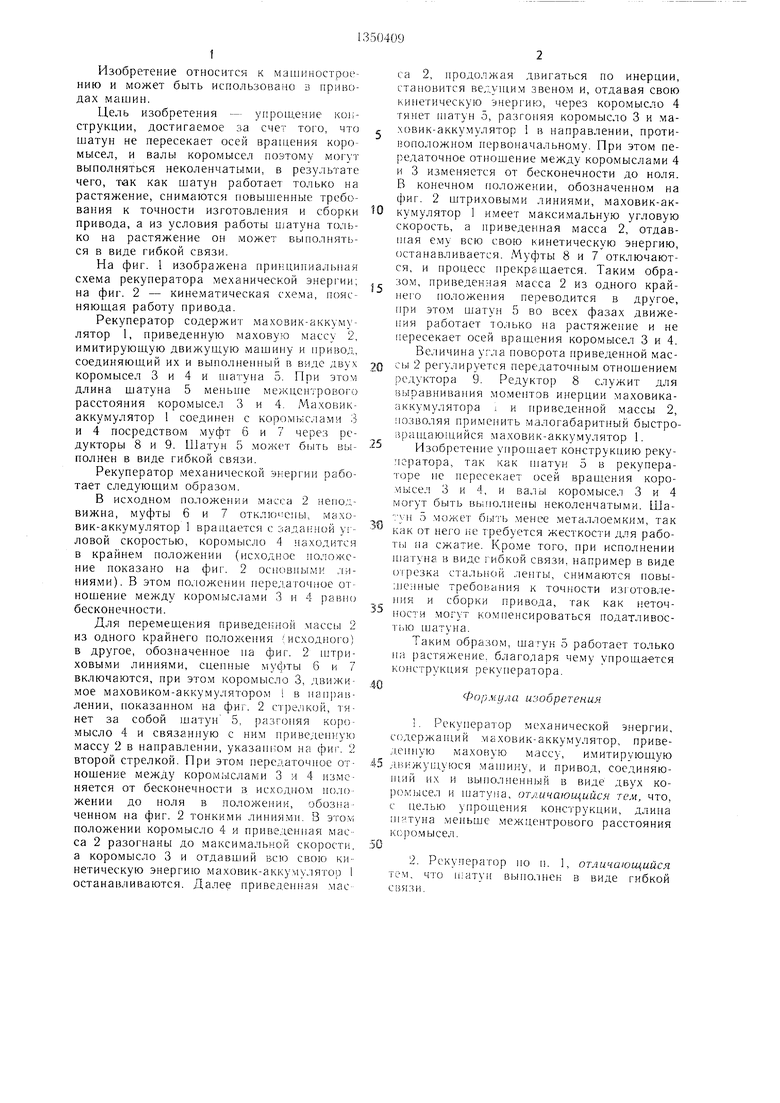
| название | год | авторы | номер документа |
|---|---|---|---|
| Рекуператор механической энергии | 1972 |
|
SU530132A1 |
| Демпфер | 1987 |
|
SU1420265A1 |
| Манипулятор | 1985 |
|
SU1355479A1 |
| Рекуператор механической энергии | 1987 |
|
SU1446398A1 |
| ДВИГАТЕЛЬ С КИНЕТИЧЕСКИМ АККУМУЛЯТОРОМ | 2008 |
|
RU2377439C2 |
| Манипулятор | 1987 |
|
SU1407790A1 |
| Ведущий мост транспортного средства | 1986 |
|
SU1399188A1 |
| СПОСОБ РЕКУПЕРАЦИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ И ТРАНСПОРТНОЕ СРЕДСТВО С РЕКУПЕРАТОРОМ (ВАРИАНТЫ) | 2001 |
|
RU2184660C1 |
| Двухтактный поршневой двигатель внутреннего сгорания и способ его работы | 2019 |
|
RU2729562C1 |
| Привод валковой дробилки | 1976 |
|
SU657843A1 |
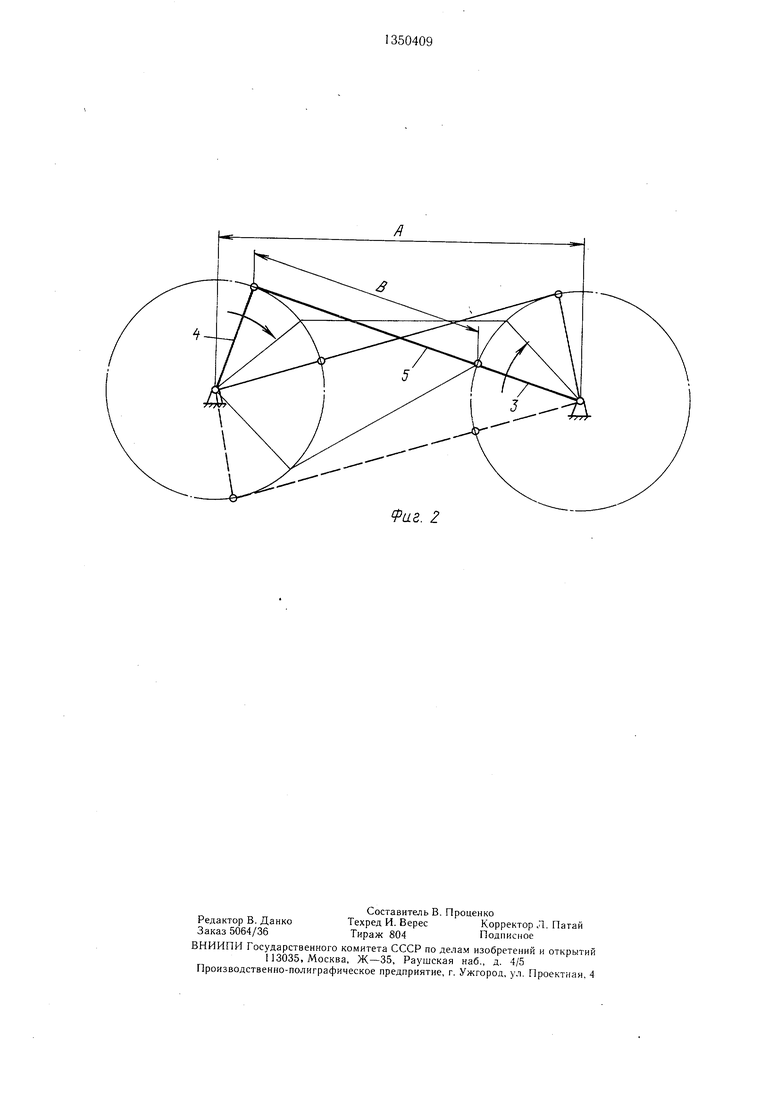
Изобретение относится к машиностроению и может быть использовано в приводах машин. Целью изобретения является упрои 1е ие конструкции, достигаемое за счет того, что шатун 5 не пересекает осей Г L вращения коромысел 3. и 4. и валы коромысел 3 и 4 поэтому могут вынолнять- ся неколенчатыми. Кроме того, так как шатун 5 работает только на растяжение, снимаются повышенные требования к точности изготовления и сборки нривода. Шатун 5 может выполняться в виде гибкой связи. При передаче энергии от маховика 1 массе 2 шатун 5 разгоняет коромысло 4 до определенного положения. В этом положении масса 2 разогнана до максимальной скорости, а маховик 1 останавливается. Далее масса 2, продолжая двигаться по инерции, становится ведун им звеном, разгоняя маховик 1 в направлении, нротивополо ном пер- воначаль;юму. I з. п. ф-лы, 2 ил. со ел о 4 О QO 9аг. 1
| 0 |
|
SU335476A1 | |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Рекуператор механической энергии | 1972 |
|
SU530132A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
