5 то П 5 12 J3
(JX/.f
8
7« 7S
о
2
Изобретение относится к машиностроению, в частности к манипуляторам для автоматизации транспортировки деталей в зону их обработки.
Цель изобретения расширение функциональных возможностей за счет увеличения числа степеней подвижности и обеспечения регулируемого по времени выстоя выходного звена в крайних по углу его поворота положениях.
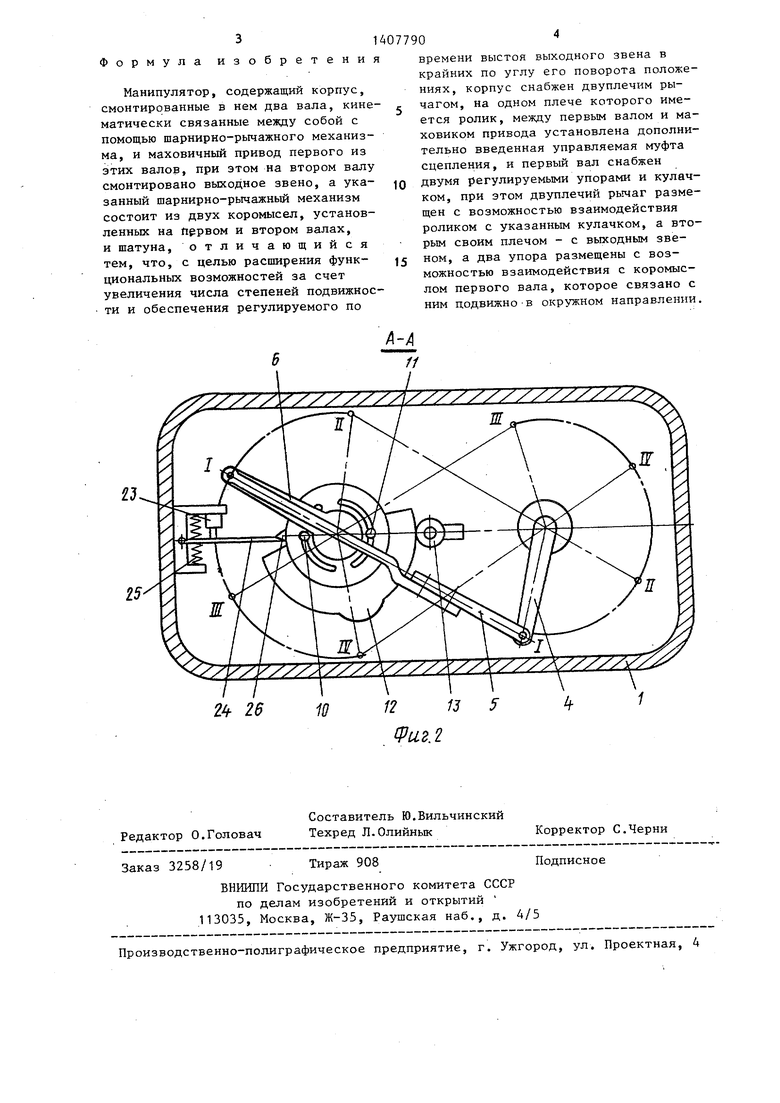
На фиг. 1 показан манипулятор, общий вид на фиг. 2 - разрез А-А на фиг. 1 .
В корпусе 1 на валу 2 с рычагом расположено выходное звено 3, связанное через коромысло 4, шатун 5 регулируемой длины и коромысло 6 с валом 7, который с помощью управляе- мой муфты 8 связан с маховиком 9, а его упоры 10 и 11 охватьюают коромысло 6. Коромысло и маховик установлены на валу 7 на подшипниках. На валу 7 установлен кулачок 12, кон тактирующий с роликом 13 двуплечего рычага 14, который вторым плечом контактирует с выходным звеном 3. Упругий элемент 15 и резьбавое соединение 16 поддерживают звено 3 в верхнем положении. Упоры 10 и 11 могут перемещаться в окружном направлении по валу 7, а кулачок 12 имеет возможность регулировки относительно упоров в окружном направлении и в напра лении оси вала 7 с фиксахщей на валу винтом 17.
Подвижная часть муфта 8 связана рычагом 18 с приводом 19 и возвратно пружиной 20. Во включенном положении муфта удерживается фиксатором 21 с приводом 22, связанным с кнопкой 23 включения, образующей совместно с рычагом 24 и пружинами 25 выключател одностороннего действия. Рычаг 24 контактирует с упором 26, установленным на валу 7. Маховик 9 связан с двигателем 27 фрикционной передачей.
Манипулятор работает следующим образом.
Перед включением выходное звено 3 находится в положении, соответствующем положению I (фиг. 2) звеньевj и его рабочий конец поднят под действием упругого элемента 15, Двигателем 27 поддерживается необходимая скорость вращения маховика 9. Муфта 8 выключена. Вал 7 упором 10 взаимодействует с коромыслом 6,
г
д
5
0 5
0
0
5
0
5
При включении муфты 8 с помощью привода l9 маховик 9 и вал 7 соединяются. При этом рычаг 18 сжимает пружину 20 и заходит за фиксатор 21. Вращение маховика 9 через вал 7 и упор 10 передается коромыслу 6, которое перемещается в положение II (фиг. 2). При этом маховик останавливается, а выходное звено 3 вместе с коромыслом 4 разгоняется и перемещает звенья в положение III(фиг. 2), где звено 3 останавливается, повернувшись на заданный угол, а маховик разгоняется в противоположном направлении, В положении III упор 10 отходит от коромысла, которое . останавливается. Выстой звеньев происходит до тех пор, пока маховик не повернется на угол, при котором упор 11 коснется коромысла 6. В период выстоя звена 3 кулачок 12 своей профильной частью отклоняет рычаг 14 и ведет к качанию звена 3. Благодаря упругому элементу 15 качание звена 3 происходит с рекуперацией энергии. Продолжительность выстоя звена 3 определяется углом поворота вала 7 относительно коромысла 6, задваемо- го расположением упоров 10 и 11. Время начала качания звена 3 задается положением профильного участка кулачка 12 относительно упоров, амплитуда качания при заданном профиле кулачка изменяется его положением на валу 7 . относительно оси рычага 1 4 .
После окончания выстоя в положении 111% когда упор 11 касается коромысла 6, происходит перемещение звеньев из.положения III в положение IV и далее в положение 1 (фиг. 2), т.е. в исходное положение, в котором упор 11 отходит от коромысла 6, т.е. наступает выстой звена 3, при котором также совершается качание звена 3. Перед окончанием выстоя упор 26 отключает подпружиненный рычаг 24 и включает кнопку 23, после чего привод 22 фиксатора 21 освобождает рычаг 18 и под действием возвратной пружины 20 выключается муфта 8. При этом звенья находятся в исходном положении (фиг. 2), а маховик 9 вращается в первоначальном направлении.- По достижении им с помощью двигателя 27 необходимой скорости включается муфта 8, и ЦИКЛ повторяется.
24 гв
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипно-ползунный механизм с остановками | 1987 |
|
SU1434201A1 |
| Демпфер | 1987 |
|
SU1420265A1 |
| Манипулятор | 1985 |
|
SU1355479A1 |
| Устройство прерывистого вращения | 1989 |
|
SU1703896A1 |
| Устройство прерывистого вращения | 1988 |
|
SU1610154A1 |
| Промышленный робот | 1984 |
|
SU1268252A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЛЕНТОЧНОГО МАТЕРИАЛА | 1994 |
|
RU2081798C1 |
| Рекуператор механической энергии | 1985 |
|
SU1350409A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| Манипулятор | 1985 |
|
SU1315294A1 |
Изобретение относится к области машиностроения, в частности к манипуляторам для автоматизации транспортировки деталей в зону их обработки. Цель изобретения - расширение функциональных возможностей за счет увеличения числа степеней подвижности и обеспечения регулируемого по времени выстоя выходного звена в крайних по углу его поворота положениях. При включении с помощью привода 19 через рычаг 18 управляемой муфты 8 вращение от маховика 9 через вал 7 и упор 10 передается на коромысло 6 и далее через шатун 5, коромысло 4 и вал 2 на выходное звено 3. Покачивание звена 3 в плоскости, перпендикулярной плоскости его поворота вокруг оси вала 2, осуществляется с.помощью кулачка 12 и двуплечего рычага 14. Двигатель 27 служит для поддержания оптимальной скорости вращения маховика 9. 2 ил.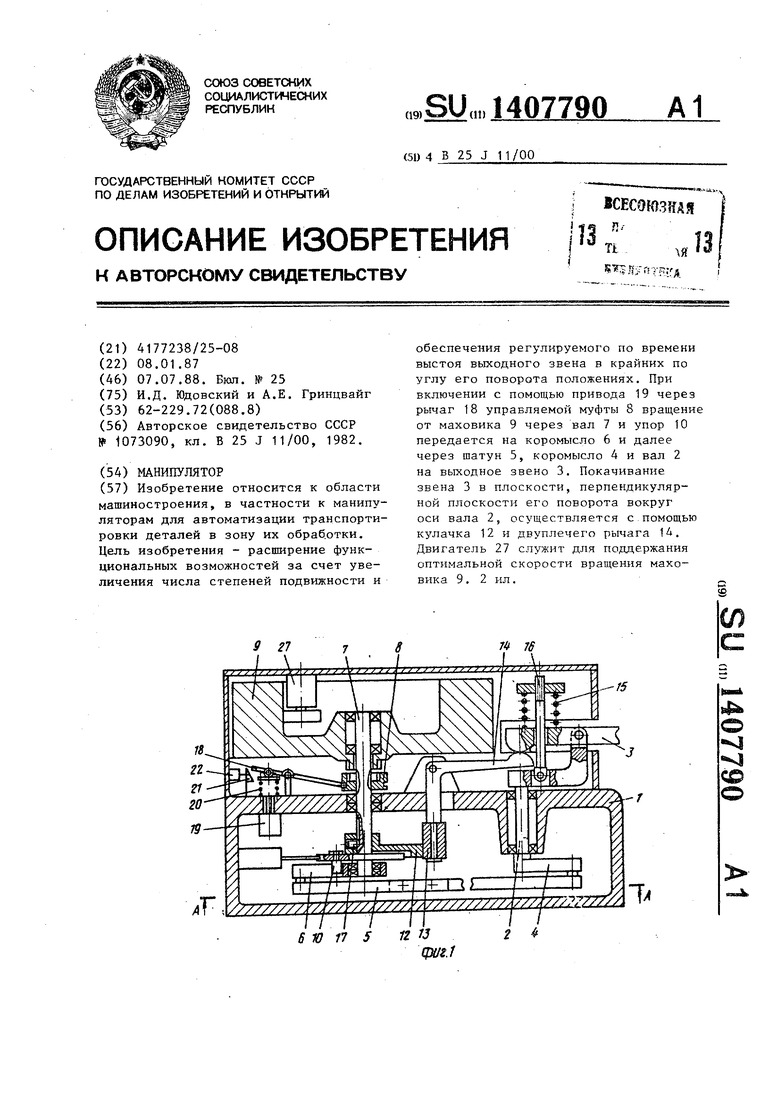
Редактор О.Головач
Составитель Ю.Вильчинский Техред Л.Олийнык
Заказ 3258/19
Тираж 908
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Корректор С.Черни
Подписное
| Манипулятор | 1982 |
|
SU1073090A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
