Изобретение относится к машиностроению, в частности к манипуляторам для автоматизации загрузки-разгрузки технологического оборудования.
Цель изобретения - снижение энергозатрат за счет рекуперации кинетической энергии подвижных звеньев при их торможении.
На фиг. 1 показано устройство, общий вид; на фиг. 2 - вид А на фиг. 1.
Манипулятор состоит из основания 1, на котором размещены двигатель 2, ось 3 с маховиком 4 и коромыслом 5, которое с помощью шатуна 6 кинематически связано с коромыслом 7, закрепленным на валу 8 с помощью зажима 9. Механическая рука 10 также закреплена на валу 8. В крайних положениях механическая рука фиксируется управляемыми фиксаторами (не показаны). На маховике 4 закреплен кривошип 11, размещенный с возможностью взаимодействия с управляемым упором 12, расположенным на коромысле 5.
Манипулятор работает следующим образом.
В исходном положении, изображенном на фиг. 2 основными линиями, маховик 4 вращается двигателем 2. При подаче команды «Пуск управляемый упор 12 выдвигается и, вступая во взаимодействие с кривошипом 11, начинает поворачивать коромысло 5, которое через шатун 6 и коромысло 7 поворачивает механическую руку 10, при этом происходит плавный разгон механической руки 10 и торможение маховика 4.
В положении, изображенном на фиг. 2 тонкими линиями, скорость поворота руки 10 максимальна. Далее рука 10 и коромысло 7, двигаясь по инерции, через шатун 6 начинают разгонять коромысло 5 и через управляемый упор 12 и кривошип 11 маховик 4
в противоположную сторону, отдавая ему свою кинетическую энергию. В положении, изображенном на фиг. 2 пунктирными линиями, коромысло 7 и рука 10, отдав всю свою кинетическую энергию маховику 4, плавно останавливается, а .маховик 4, продолжает вращение. При этом кривошип 11 отходит от управляемого упора 12, который убирается, и далее маховик 4 вращается свободно. Рука 10 таким образом из одного крайнего положения перемещается в другое.
Компенсация потерь энергии, вызванных силами трения в шарнирах, производится двигателем 2, который поддерживает на заданном уровне угловую скорость маховика 4.
Для перевода руки 10 в исходное положение управляемый упор 12 вновь выдвигается, вступает во взаимодействие с кривошипом 11 и начинает вращать коромысло 5. В результате происходит процесс, аналогичный описанному.
Формула изобретения
Манипулятор, содержащий основание, механическую руку, смонтированную на нем с возможностью поворота, привод, содержащий двигатель с ротором и кривошип на выходном звене привода, кинематически связанный с механической рукой с помощью шарнирно-рычажной системы, содержащей шатун и коромысло, закрепленное на руке, отличающийся тем, что, с целью снижения энергозатрат за счет рекуперации кинетической энергии подвижных звеньев при их торможении, на оси вращения кривощипа установлено дополнительное коромысло, шарнирно связанное с шатуном и снабженное управляемым упором, расположенным с возможностью взаимодействия с упомянутым кривощипом.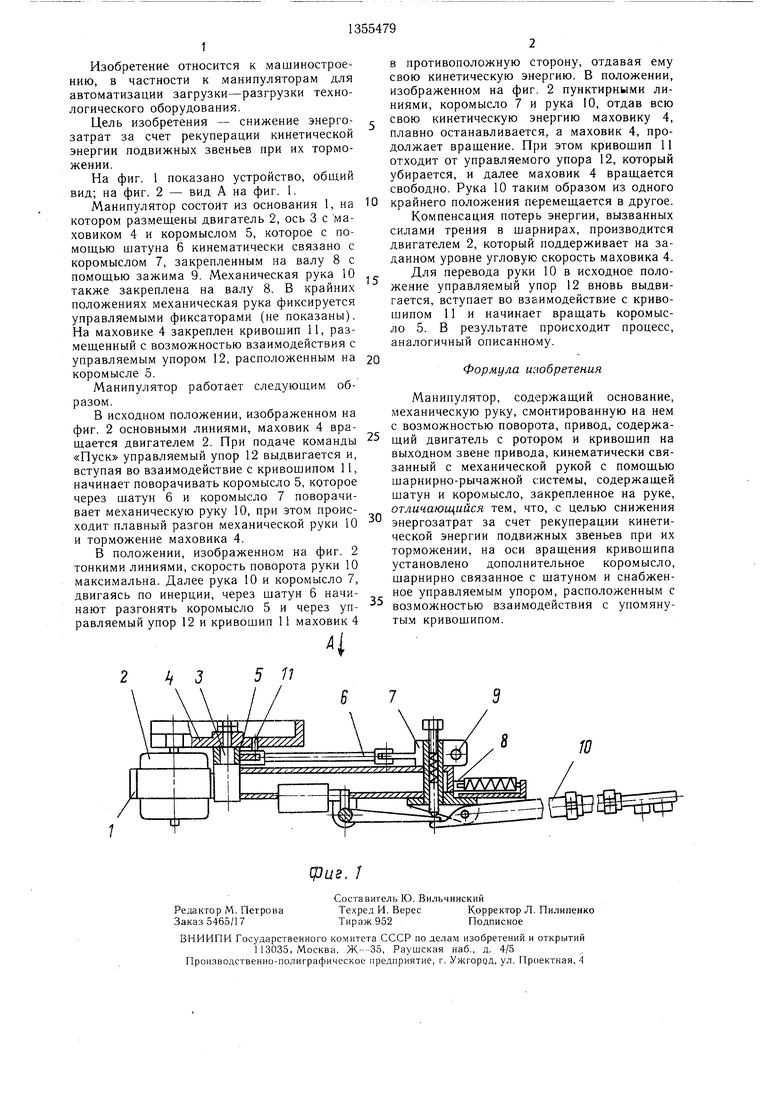
| название | год | авторы | номер документа |
|---|---|---|---|
| Рекуператор механической энергии | 1985 |
|
SU1350409A1 |
| Манипулятор | 1987 |
|
SU1407790A1 |
| Кривошипно-ползунный механизм с остановками | 1987 |
|
SU1434201A1 |
| Манипулятор | 1985 |
|
SU1315294A1 |
| Демпфер | 1987 |
|
SU1420265A1 |
| Рекуператор механической энергии | 1972 |
|
SU530132A1 |
| УСТРОЙСТВО ПРЕРЫВИСТОГО ВРАЩЕНИЯ | 1991 |
|
RU2038996C1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1585143A1 |
| Модуль промышленного робота | 1986 |
|
SU1399110A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1611730A1 |
Изобретение относится к машиностроению, в частности к манипуляторам для автоматизации загрузки-разгрузки технологи. А. кн.: вой аоеавгического оборудования. Цель изобретения - снижение энергозатрат за счет рекуперации кинетической энергии подвижных звеньев при их торможении. При враш,ении маховика 4 закрепленный на нем кривошип 11 через управляемый упор 12 из исходного положения поворачивает коромысдо 5, шатун 6 и коромысло 7. Механическая рука, закрепленная на валу 8, поворачивается и приобретает максимальную угловую скорость, а маховик 4 останавливается. При дальнейшем повороте механической руки звенья 5-7 занимают новое положение, при этом механическая рука занимает крайнее положение и останавливается, а маховик вновь начинает вращаться. 2 ил. иЪ Л а i (Л 8 со сд СП 4 иг. 2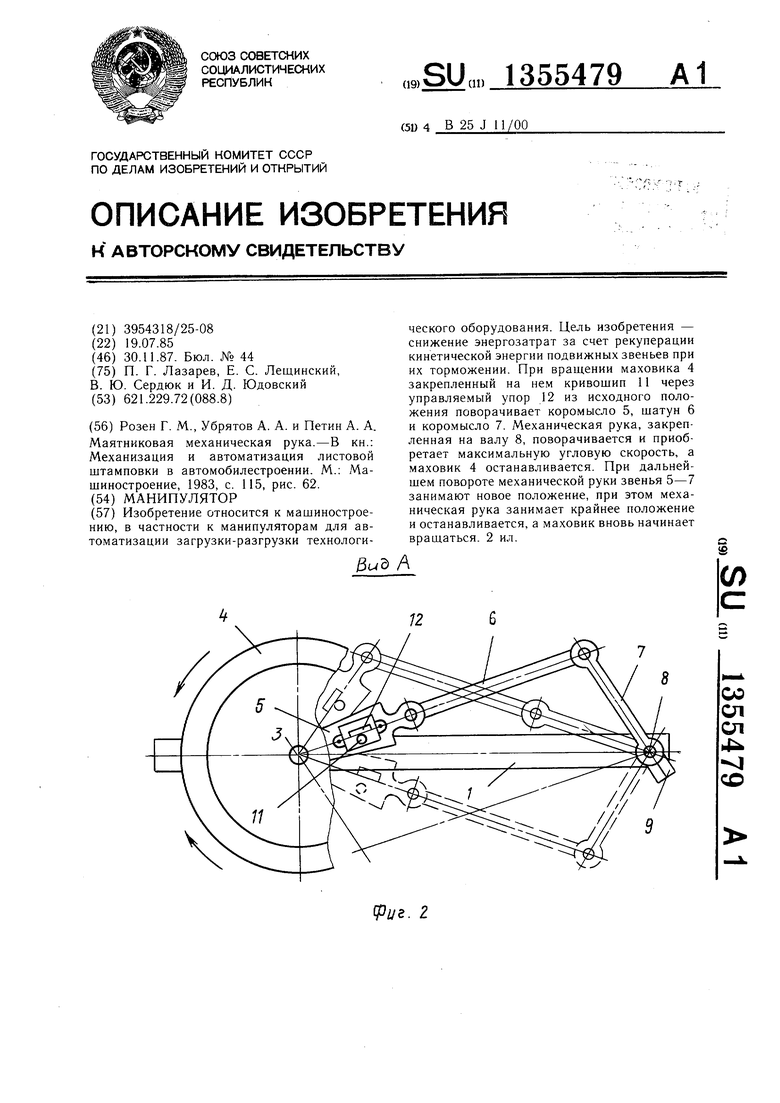
р /
ю
. I
Составитель Ю. Ви.мьчинский Техред И. ВересКорректор Л. Пилипенко
Тираж 952Подписное
ВНИИПИ Государственного комитета СССР по де.лам изобретений и открытий
1 13035, Москва, Ж---35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Розен Г | |||
| М., Убрятов А | |||
| А | |||
| и Петин А | |||
| А | |||
| Маятниковая механическая рука.-В кн.: Механизация и автоматизация листовой штамповки в автомобилестроении | |||
| М.: Машиностроение, 1983, с | |||
| Ударно-долбежная врубовая машина | 1921 |
|
SU115A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
