Изобретение относится к электротехнике и может быть использовано для регулирования скорости электроприводов постоянного тока с питание от сети переменного тока через вентильный преобразователь. Известны устройства для регулирования скорости вентильного электр привода постоянного тока, включающи задающее аналоговое или дискретное устройство, аналоговые или дискретные регуляторы и датчики положения и скорости, аналоговые регуляторы и датчики тока. Устройства для регулирования, построенные на аналоговых регулятор и датчиках, можно разделять на три типа, имеющие различные структуры. Наиболее простое устройство соде жит один регулятор, на вход которого поступает сигнал рассогласования между заданным и действительным значениями регулируемого параметра (напряжения или скорости вращения электродвигателя) и сигнал нелинейно обратной связи по току 1. При токе, меньшем заданного предельного значения, схема работает ка регулятор напряжения или соответственно скорости, а при превышении это величины - как регулятор тока, такая одноконтурная схема регулирования не позволяет оптимально настроить регулятор, так как передаточные функ ции контуров тока и напряжения (скорости) различны. Известно также устройство для регулирования скорости электродвигателя, которое содержит два независит их попеременно работакяцих контура сg отдельными регуляторами 2. Однако . недостатком таких схем является их сложность. Наиболее распространенными в настоящее время являются схемы подчиненного регулирования параметров. По своим динамическим показателям оНи практически равноценны двухконтурным системам, параллельного действия, но содержат меныяее количество элементов, более просты и удобны в настройке 3. Устройства регулирования на аналоговых элементах не отвечают возросшим требованиям к точности работы промышленных агрегатов. В них отсутствует возможность непосредственного сопряжения с цифровыми вычислительными блоками и различного рода програмт нозадающими устройствами.
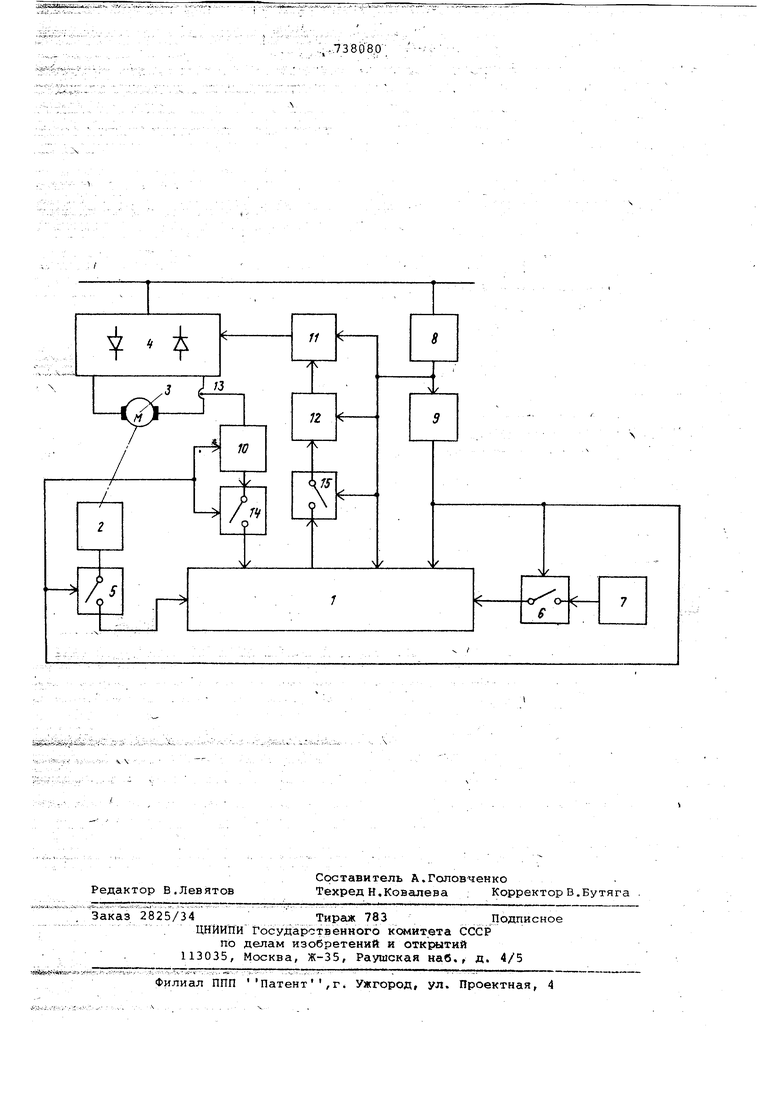
738080 Наиболее близким к изобретению Техническим решением является устро ство для регулирования скорости электродвигателя постоянного тока, подключенного к сети переменного то через вентильный преоб эазователь, содержащее дискретный блок задания, цифровой вычислиfeльный блок, выпол няющий функцию регулятора скорости, дискретный датчик скоройти, анало о Шб регуляторы скорости тока и 5б6т ветствующие датчики скорости и тока 4 ,-; - - Недостатком известного устройстesi явлйёТся наличие значитёльного (ГОЛИчёства элементов, выполиенных на различной элементной базе, усложняет технологию изгоуовления, эксплуатацию и снижает надежность устройства. Целью данного изобретений являет ся повышение надежности и упрощение .изготовления устройства. .--. Указанная цель достигается тем, 5на6жёч6дйскретны Г среднего значения тока якоря двигателя, коммутаторами, последовательн соединенными блоком синхронизации, вхОДом,ооединенньлм«с питающей сётью и блоком деления частоты, выход которого подключен к цифровому вычислительному блоку, последовательно соединенньйми блоком преобразования и блоком распределения импульсов,выход которого связан с вентильным преобразователем, а вход блока преобраз овйния - через коммутатор - с цифровым вычислительным блоком, к которому через другие указанные ком мутаторы подключены датчик скорОсти и ёйок задания, причем управляющие входы блока преобразования цифровог .кода в импульс напряжения, распределителя импульсов и коммутатора В их цепи соединены между собой и подключены к выходу блока синхрони зацйи и цифровому вычислительному блоку, а соединенные между собой управляющие входы датчика среднего значения тока якоря электродвигател и других коммутаторов - к выходу блока деления частоты. Сущность изобретения поясняется чертежом, на котором представлена блока-схема устройства для регулирр й йй Г скЬр15с элё к тРИД в и гателя постоянного тока Устройст вб содержит цифровой вы;числительный блок Г, дискретный дат чик скорости 2, механи:чески связан; ный с якорем 3 эЛёктродвигатётГя- постоянного тока, подключенного чер вентильный преобразователь 4 к сети переменного тока и через коммутатор 5 к цифpoвoмS вычислительному блоку 1. На вход цифрового вычислительног блока 1 через коммутатор 6 поступае :с1йГНал с Дискретного блока 7 зада- ния, Устройство снабжено блоком 8 инхронизации, вход которого соедиен с сетью переменного тока, выхбд соВХОДОМ делителя частоты 9, выхоом подключенного к цифровому вычис- . ительному блоку 1. .. В устройство введены дискретный атчик 10 среднего значения тока Якоря двигателя, блок распределения импульсов 11 и блок 12 преобразования цифрового кода в импульс напряжения. Вход дискретного датчика 10 соединен с датчиком 13 тока якоря двигателя, а выход через, коммутатор 14с цифровымвычислительным блоком 1. Вход блока- 12 через коммутатор 15соединен с цифровым вычислительным блокъм, а выход - со входом блока распределения импульсов 11, подключенного к вентильному преобразователю 4. Управляющие входы блока распределения импульсов 11, блока 12 преобразования цифрового кода в импульс напряжения соединены между собой и подключены к цифровому вычислительному блоку. 1 и к выходу блока 8 синхронизации. Управляющие входы дискретного датчика 10 среднего значения тока якоря двигателя и коммутаторов 5,6,14 также соединены между собой и подключены к цифровому вычислительному блоку 1 и к выходу блока 9 деления частоты. Устройство для регулирования скорости электродвигателя работает следующим образом. В блоке 8 синхронизации выделяется в моменты времени, соответствующие, точн:ам естественной коммутации вентилей, синхронизирующие импульсы. Точки еЬтёствеНной коммутации определяются путем сравнения анодных напряжений двух смежных в очередности включения вентилей. . Момент равенства соответствующих напряжений характеризует указанную точку. Выходные сигналы блока синхронизации поступают в блок 11 распределения импульсов, блок 12 преобразования цифрового кода в импульс напряжения, коммутатор 15, блок 9 деления частоты и в вычислительный блок 1. Сигналы с вЫхода блока 9 поступают на управляющие входы ком- . мутаторов 5,6,14, цифровой вычислительный блок 1 и дискретный датчик 10 среднего значения тока якоря двигателя. Частота этих сигналов кратна частоте синхронизирующих импульсов блока 8. По каждому сигналу блока 9 в вычислительный блок 1 через коммутаторы 5,6,14 вводится информация с дискретного датчика 10 среднего значения тока яйоря двигателя,дискретного датчика скорости 2 и блока 7 задания. Кроме того, информация датчика 10 сбрасывается в нуль и начинается измерение среднег о значения тока двйгаТёЛя до йОМёнта прихода сигнала с блока 9. Измерение среднеГО значения тока двигателя производится путем интегрирования (суммировния) мгновенных значений тока. По ригналам блока 8 из вычислительного блока 1 через ксячмутатор 15 выдается в блок 12 преобразования кода в импульс напряжения код, соответствуючщй углу управления вентильным преобразователем, В блоке 12 числовой код преобразуется в импульс напряжения, сдвинутый от точки естественной коммутации вентилей на вр0ля, прпорциональное поступиииему коду. Импульс напряжения поступает в блок
11распределения импульсов, где он усиливается по мощности, гальванически развязывается и поступает на соответствующие вентили. Переключение выходных сигналов блока 11 по различным направлениям производится по сигналам блоков 12 и 8. Если в блок
12поступает код, соответствующий углу управления, превышающем период следования тактирующих импульсов, вырабатываемых блоком 8, то к приходу очередного тактирующего импульса в блоке 12 преобразование ранее поступившей информации прекращается, из вычисли -ельного блока вводится новый скорректированный код и начинается его преобразование.
Частота синхронизирующих импульсов равна отношению частоты питающей сети к фаз ности преобразователя. Для целого ряда электроприводов, например, электроприводов шахтного подъема, раскатных рольгангов прокатных станов, буровых установок и т.д. максимальная частота регулирования может быть в 2-3 раза меньше частоты следования синхронизирующих импульсов. Поэтому с целью уменьшения требования к быстродействию вычислительного блока блок деления частотывыполняется с регулируемым коэффициентом деления, что одновременно позволит в: случае необходимости, управлять с помощью вычислительного блока несколькими незави.сящими электроприводами . I
Достоинства данного устройства заключаются в высокой надежности при малых габаритах и массе, высокой степени унификации; измерение передаточных функций регуляторов, реализуемых в ЭВМ осуществляется изменением программы ее работы; возможно
управлять одним устройством группой электродвигателей; точность регулирования сложных режимов высока; возможна прямая связь локальных цифровых регуляторов с устройствами управле ни я высшего у рйвнгя; Tf3 готовл ёняе устройства не представляет сложности.
- Формула изобретения
Устройство для регулирования скорости электродвигателя постоянного тока, якорь которого подключен через вентильный преобразователь к сети переменного тока, содержащий цифровой вычислительный блок, дискретные датчмк скоростиИ блок задания, от л и чающееся тем, что, с целью
5 повышения Нсщёжности и упрощения из: готовлёнйя, оно снабжено Дискретным датчиком среднего зйачения тока якоря двигателя, коммутаторами, последо вательно соединенными блоком crti xpo0низации, выходом,соединенным с питающей сетыб, и блоком деления частоты, выход которого подключен к цифровому , вычисЛй-гёЛьному блоку, последовательно соединёнными блоком преобразования , и блоком распределения импульсов,
5 ВЁЗХод тготорого связан с вентильным преобразователем, а вход блока преобразования - через комму.татор с цифровым вычислительным блоком, к которому через другие указанные ком0мутаторы подключены датчик скорости и блок задания, причем управляющие входы блока преобразования цифрового кода в импульс напряжения, распределителя импульсов и коммутатора
д в их цепи соединены Между собой и подключены к выходу блока синхронизации и цифровому вычислительному блоку, а соединенные между собой управ- ляющие входы датчика среднего значения тока якоря электродвигателя и других коммутаторов - к выходублока деления частоты,
Ибточники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР
5 №316104, кл, G Об J 3/00, 1971,
2,Авторское свидетельство СССР №416670, кл. G 05 В 13/00, 1974,
3,Авторское свидетельство СССР №436425, кл, Н 02 Р 5/50, 1974,
0
4,Слежановский О.В, и др. Устройство унифицированной блочной системы
регулирования, М,, Энергия, 1975, с,8-15,
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1983 |
|
SU1259458A1 |
| Электропривод переменного тока | 1981 |
|
SU1026272A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Устройство для регулирования скорости электродвигателя постоянного тока | 1981 |
|
SU983954A1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ДВОЙНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2037263C1 |
| Устройство для регулирования частоты вращения электродвигателя | 1979 |
|
SU900390A1 |
| Вентильный электропривод | 1990 |
|
SU1767679A1 |
| Устройство для регулирования скорости электродвигателя | 1980 |
|
SU964936A1 |
| Способ управления электроприводом постоянного тока дебалансного виброисточника и устройство для его осуществления | 1983 |
|
SU1144065A1 |
| Устройство для управления возбуждением электродвигателя постоянного тока | 1978 |
|
SU782113A1 |