10
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах автоматического числового управления координатными перемещениями исполнительных органов станка.
Цель изобретения - расширение функ циональных возможностей за счет воз- можности управления механизмами с различным элементарным шагом перемещения.
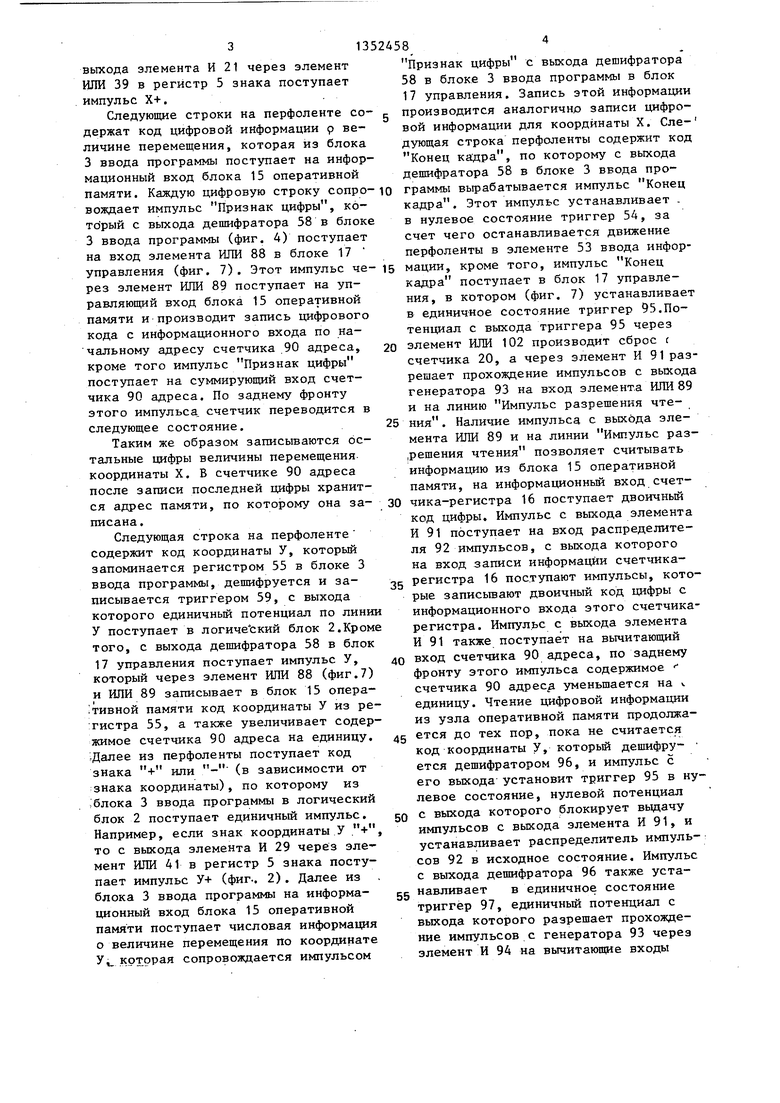
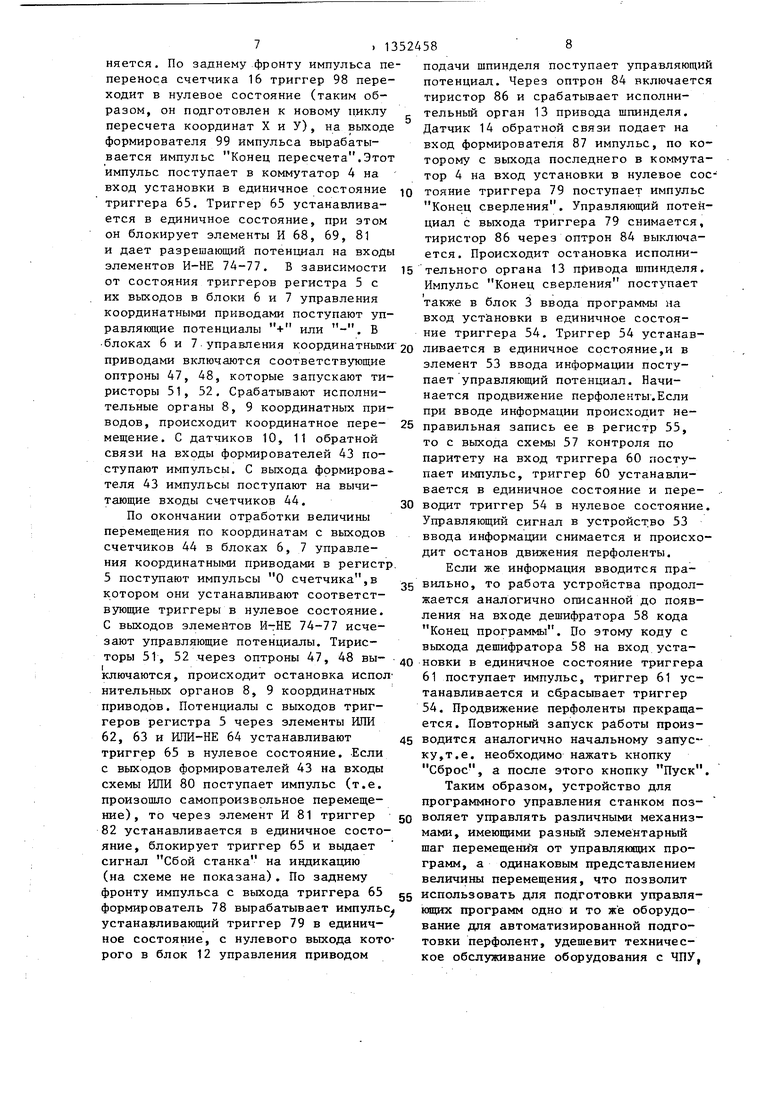
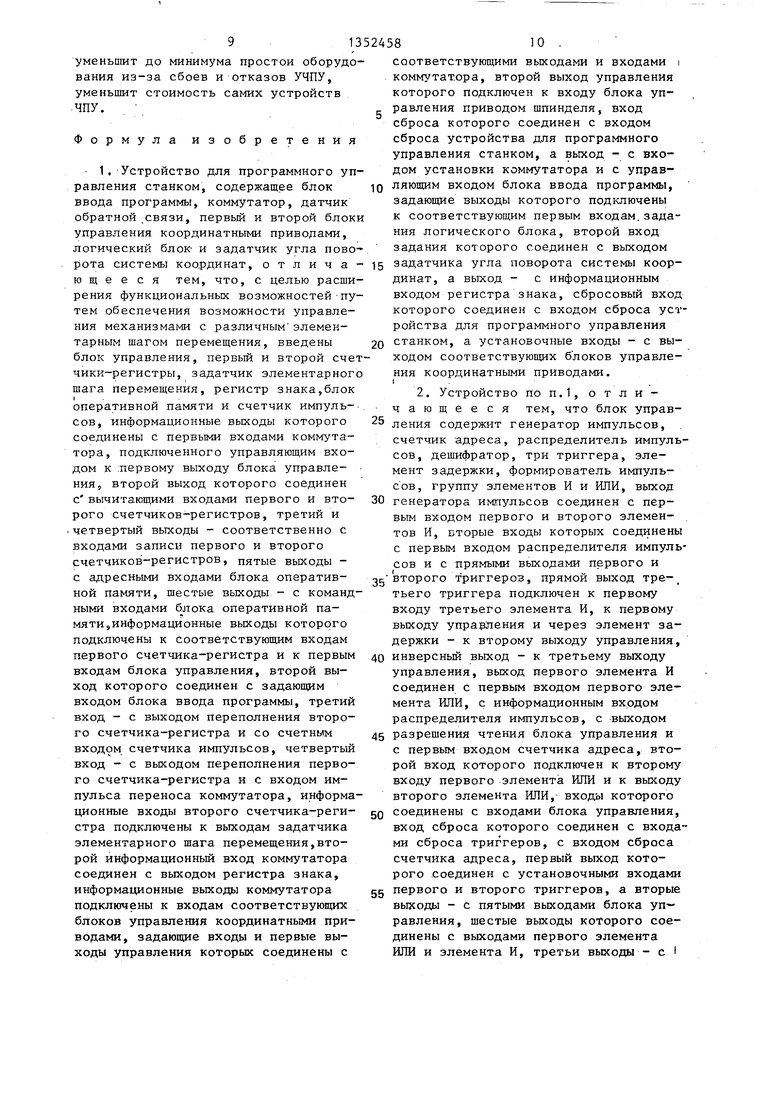
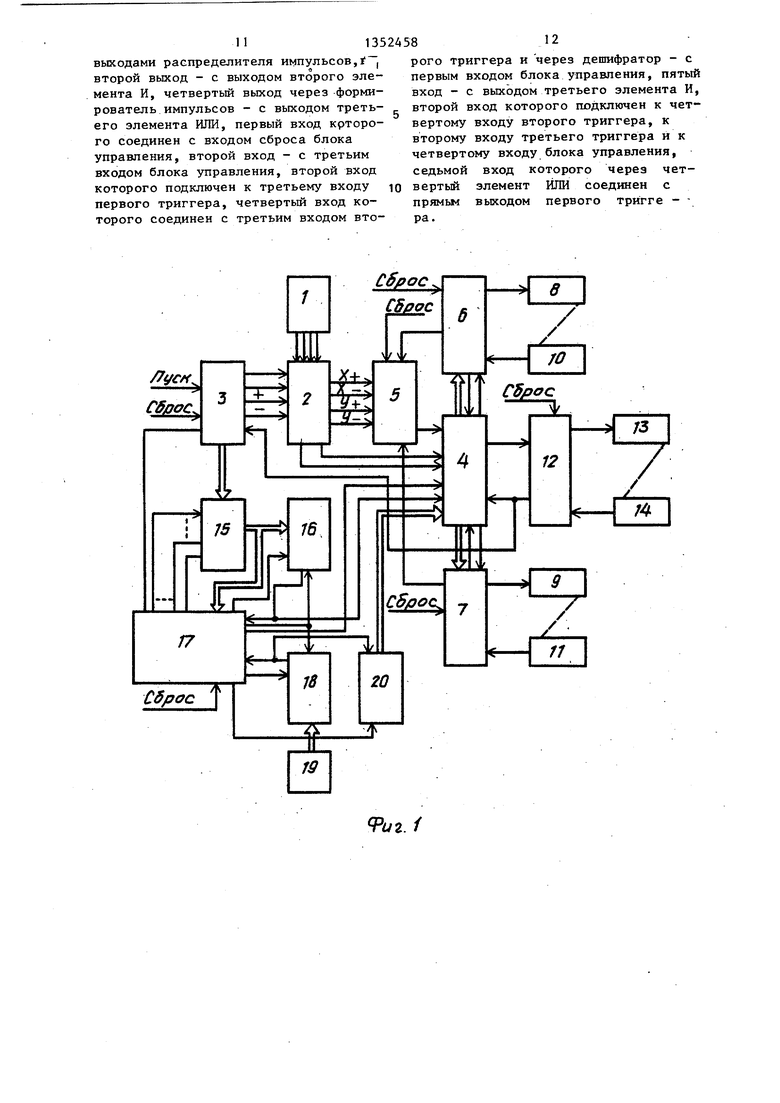
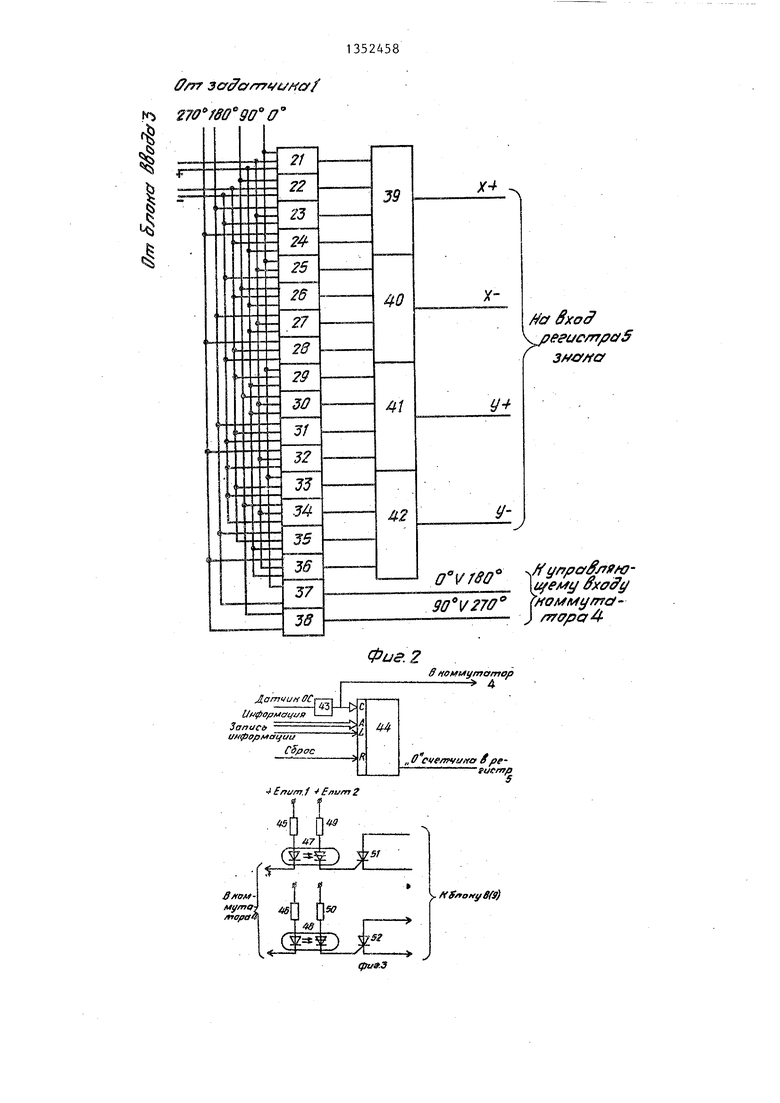
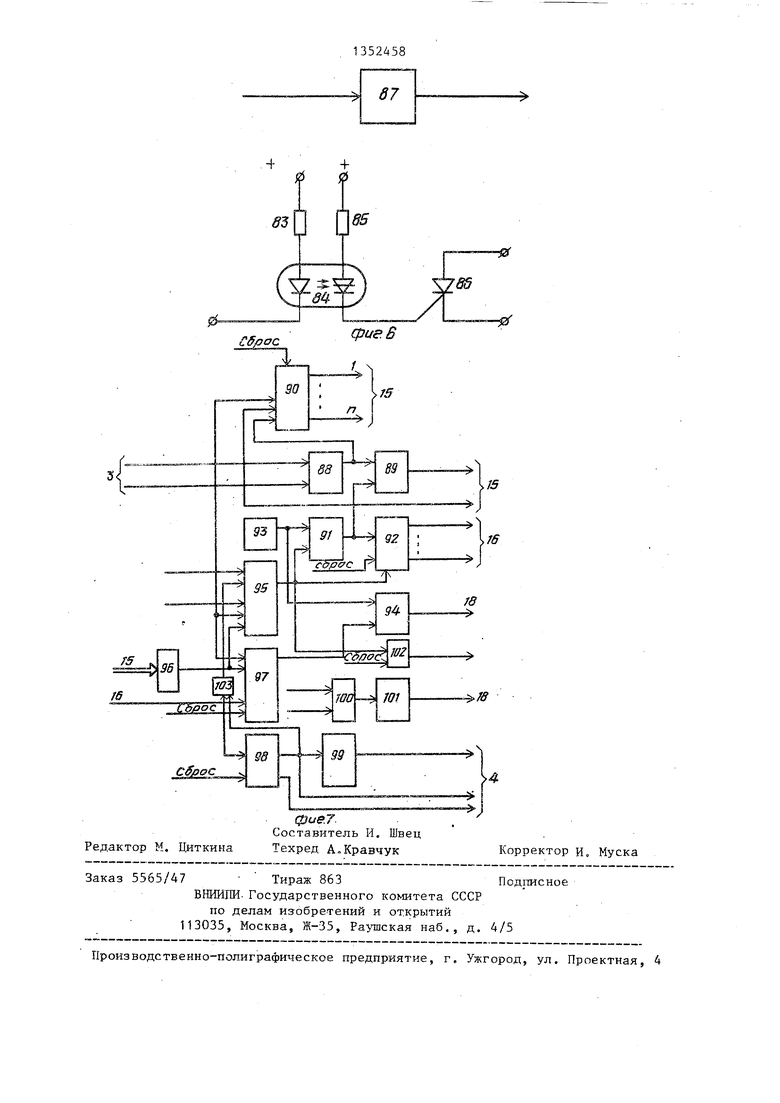
На фиг. 1 показана структурная схема устройства для программного управления станком; на фиг. 2 - принци- 15 пиальная схема логического узла; на фиг. 3 - принципиальная схема блока управления координатным приводом; на фиг. 4 - принципиальная схема блока ввода программы; на фиг. 5 - принципиальная схема коммутатора; на фиг.6 - принципиальная схема блока управления приводом шпинделя; на фиг. 7 - принципиальная схема блока управления.
Устройство содержит задатчик 1 угла поворота системы координат, логический блок 2, блок 3 ввода программы, коммутатор 4, регистр 5 знаg
25
20
ка, блоки 6, 7 управления координатными приводами, исполнительные органы 30 Задатчик 1 угла поворота системы ко8, 9 координатных приводов, датчики 10, 11 обратной связи, блок 12 управления приводом шпинделя, исполнительный орган 13 привода шпинделя, датчик 14 обратной связи, блок 15 оперативной памяти, первый счетчик- регистр 16, блок 17 управления, второй счетчик-регистр 18, задатчик 19 величины элементарного шага перемещения и счетчик 20 импульсов. Логичес- 40 держащая координаты X, по которой из кий блок 2 содержит (фиг. 2) элемен- блока 3 ввода программы в логический
блок 2 по линии X поступает единичный потенхщал.
Далее считывается строка, содер- 45 жащая код + или - (в зависимости от знака координаты), и по линии
ты И 21-36, элементы ИЛИ 37-42. Блоки 6, 7 управления координатными приводами состоят (фиг. 3) из формирователей 43 сигналов датчиков обратной связи, счетчиков 44 импульсов, сопротивлений 45, 46, оптронов 47, 48, сопротивлений 49, 50, тиристоров 51, 52. Блок 3 ввода программ содержит (фиг. 4) элемент 53 ввода информации, триггер 54, регистр 55, формирователь 56, элемент 57 контроля по паритету, дешифратор 58, триггеры 59-61. Коммутатор 4 содержит (фиг.5) элементы ИЛИ 62,63, ШШ-НЕ 64, триггер 65, группы элементов И 66, 67, элементы И 68, 69, И-ИЛИ 70, 71, И 72, 73, И-НЕ 74-77, формирователь 78, триггер 79, элементы ИЛИ 80,И 81,
Ч или - в логический блок из блока 3 ввода программы поступает единичный импульс. В , если от задатчика
50 1 угла поворота системы координат поступает сигнал 0°, то в логическом блоке 2 будут подготовлены к работе элементы И 21, 25, 29, 33, а с выхода элемента ИЛИ 37 вкокмутатор 4 посту55 пает сигнал О V 180°, управляющий распределением числовой информации, в блоки 6 или 7 управлейия координатными приводами (фиг. 2). Таким образом, если знак координаты +, то с
триггер 82. Блок 12 управления приводом шпинделя содержит (фиг. 6) сопротивление 83, оптрон 84, сопротив- ление 85, тиристор 86, формирователь 87. Блок 17 управления содержит элементы ИЛИ 88, 89, счетчик 90 адреса, элемент И 91, распределитель 92 импульсов, генератор 93 импульсов,элемент И 94, триггер 95, дешифратор 96, триггеры 97, 98, формирователь 99 импульса, элемент ИЛИ 100, формирователь 101 импульсов и элементы ИЛИ 102, И 103.
Выполнение логического блока 2, блока 3 ввода программы, коммутатора 4, блоков 6 и 7 управления координатными приводами., блока 12 управления приводом шпинделя и узла 17 управления в описании приведено как один из вариантов исполнения.
Устройство работает следующим образом.
Перед началом работы на все блоки (фиг. Dj, содержащие счетчики, регистры и триггеры, по шине Сброс поступает сигнал, обнуляющий их, а в счетчик-регистр 18 записывается значение элементарного шага перемещения.
ординат подает на первьй вход логического блока 2 сигнал угла поворота, при помощд которого логический блок 2 настраивается на один из четырех 25 углов поворота системы координат.От . кнопки Пуск с пульта управления в блок 3 ввода программы поступает сигнал на ввод информации. Из перфо- - ленты считывается первая строка, со-
Ч или - в логический блок из блока 3 ввода программы поступает единичный импульс. В , если от задатчика
1 угла поворота системы координат поступает сигнал 0°, то в логическом блоке 2 будут подготовлены к работе элементы И 21, 25, 29, 33, а с выхода элемента ИЛИ 37 вкокмутатор 4 поступает сигнал О V 180°, управляющий распределением числовой информации, в блоки 6 или 7 управлейия координатными приводами (фиг. 2). Таким образом, если знак координаты +, то с
вьпсода элемента И 21 через элемент ИЛИ 39 в регистр 5 знака поступает импульс Х+,
Следующие строки на перфоленте со держат код цифровой информации р величине перемещения, которая из блока 3 ввода программы поступает на информационный вход блока 15 оперативной памяти. Каждую цифровую строку сопро вождает импульс Признак цифры, который с выхода дешифратора 58 в блок 3 ввода программы (фиг. 4) поступает на вход элемента ИЛИ 88 в блоке 17 управления (фиг. 7), Этот импульс че рез элемент ИЛИ 89 поступает на управляющий вход блока 15 оперативной памяти и производит запись цифрового кода с информационного входа по начальному адресу счетчика .90 адреса, кроме того импульс Признак цифры поступает на суммирующий вход счетчика 90 адреса. По заднему фронту этого импульса, счетчик переводится в следующее состояние.
Таким же образом записываются остальные цифры величины перемещения, координаты X. В счетчике 90 адреса после записи последней цифры хранится адрес памяти, по она за- писана.
Следующая строка на перфоленте содержит код координаты У, который запоминается регистром 55 в блоке 3 ввода программы, дешифруется и записывается триггером 59, с выхода которого единичный потенциал по линии У поступает в логиче ский блок 2,Кром того, с выхода дешифратора 58 в блок 17 управления поступает импульс У, который через элемент ИЛИ 88 (фиг.7) и ИЛИ 89 записывает в блок 15 опера- тивной памяти код координаты У из ре- :гистра 55, а также увеличивает содержимое счетчика 90 адреса на единицу. Далее из перфоленты поступает код знака + или (в зависимости от знака координаты), по которому из блока 3 ввода программы в логический блок 2 поступает единичный импульс. Например, если знак координаты У .+, то с выхода элемента И 29 через элемент ИЛИ 41 в регистр 5 знака поступает импульс У+ (фиг.. 2) . Далее из блока 3 ввода программы на информа- ционный вход блока 15 оперативной памяти поступает числовая информация о величине перемещения по координате У -кртррзя Сопровождается импульсом
5
0
0 5 Q g
5
Признак цифры с выхода дешифратора 58 в блоке 3 ввода программы в блок 17 управления. Запись этой информации производится аналогично записи цифровой информации для координаты X. Сле- дующая строка перфоленты содержит код Конец кадра, по которому с выхода дешифратора 58 в блоке 3 ввода программы вьфабатывается импульс Конец кадра. Этот импульс устанавливает . в нулевое состояние триггер 54, за счет чего останавливается движение перфоленты в элементе 53 ввода информации, кроме того, импульс Конец кадра поступает в блок 17 управления, в котором (фиг. 7) устанавливает в единичное состояние триггер 95.Потенциал с выхода триггера 95 через элемент ИЛИ 102 производит сброс ( счетчика 20, а через элемент И 91 разрешает прохождение импульсов с выхода генератора 93 на вход элемента ИЛИ 89 и на линию Импульс разрешения чтения . Наличие импульса с выхода элемента ИЛИ 89 и на линии Импульс раз- ,решения чтения позволяет считывать информацию из блока 15 оперативной памяти, на информационный вход счетчика-регистра 16 поступает двоичный код цифры. Импульс с выхода элемента И 91 поступает на вход распределителя 92 импульсов, с выхода которого на вход записи информации счетчика- регистра 16 поступают импульсы, которые записьшают двоичный код цифры с информационного входа этого счетчика- регистра. Импульс с выхода элемента И 91 также поступает на вычитающий вход счетчика 90 адреса, по заднему фронту этого импульса содержимое счетчика 90 адресу уменьшается на v единицу. Чтение цифровой информации из узла оперативной памяти продолжается до тех пор, пока не считается код координаты У, который дешифру- ется дешифратором 96, и импульс с его выхода установит триггер 95 в нулевое состояние, нулевой потенциал с выхода которого блокирует вьщачу импульсов с вькода элемента И 91, и устанавливает распределитель импульсов 92 в исходное состояние. Импульс с выхода дешифратора 96 также устанавливает в единичное состояние триггер 97, единичный потенциал с выхода которого разрешает прохождение импульсов с генератора 93 через элемент И 94 на вычитающие входы
513
счетчиков-регистров 16 и 18, В счетчике-регистре 16 находится значение В(еличины перемещения по координате У, а в,счетчике-регистре 18 - значение величины элементарного шага перемещения, причем содержимое счетчика-регистра 16 всегда больше содержимого счетчика-регистра 18. Каждый импульс с выхода элемента И 94 уменьшает содержимое счетчиков-регистров
16и 18 на единицу. При достижении
в счетчике-регистре 18 значения нуля на его выходе вырабатывается импульс переноса, который поступает на суммирующий вход счетчика 20 импульсов и прибавляет к его содержимому единицу (т.е. один элементарный шаг перемещения), а также через элемент ИЛИ 100 и формирователь 101 записывает в счетчик-регистр 18 значение величины элементарного шага перемещения, и следующим импульсом с выхода элемента И 94 описанньш цикл работы устройства продолжается до тех пор,пОка с выхода счетчика-регистра 16 в блок
17управления не поступит импульс переноса.
, В блоке 17 управления (фиг. 7) этот импульс устанавливает в нулевое состояние триггер 97 и тем самым блокирует прохождение импульсов генератора -93 на выход элемента И 94. Импульс переноса счетчика-регистра 16 поступает также в коммутатор 4, где (фиг. 5) через входы элементов И 72 и 73 при наличии разрешающих потенциалов на вторых входах этих элементов производит запись информации о величине перемещения в блоке 6 или 7 управления координатными приводами. Разрешающие потенциалы на вторых входах элементов И 72, 73 вырабатываются схемами И-ИЛИ 70, 71 при наличии из блока 2 сигналов 0° v 180 (90 V 270), а также потенциалов X или У с выходов триггера 98 в блоке 7 управления, В описьгоаемом случае присутствует сигнал 180 и единичный потенциал У с инверсного выхода триггера 98, при этом на выходе элемента И-ШШ 70 присутствует разрешающий потенциал. Этот потенциал раз- рещает через элемент И 68 и группу
триггер 97. Последний разрешает работу устройств в цикле пересчета величины перемещения по координате X в количестве элементарных шагов перемещения, заданных задатчиком 19. Устройство производит пересчет величины перемещения по координате X аналогично описанному для координаты У. В конце пересчета счетчик-регистр 16 вьфабатывает импульс переноса, кото- .
35 рый устанавливает триггер 97 в нулевое состояние, ш-шульсы с генератора 93 не проходят через схему И 94 на вычитающие входы счетчиков-регистров 16 и 18. Так как триггер 98 находится
40 в единичном состоянии, в коммутаторе 4 разрешающей потенциал присутствует на выходе элемента И-ИЛИ 71. Информация с выхода счетчика 20 поступает через группы элементов И 67 в блок
45 6 управления координатньм приводом на информационный вход счетчика-регистра 44. Импульс переноса счетчика- регистра 16 через элемент И 73 производит запись этой информации в счет
50 чик-регистр 44.
30
Поскольку триггер 98 находится в единичном состоянии, импульс переноса счетчика-регистра 16 на вход уста- элементов И 66 поступление информации:„ новки в единичное состояние триггера о величине перемещения по координате 95 через элемент И 103 не пройдет и У с выхода счетчика 20 на информационный вход счетчика-регистра 44 (фиг. 3) в блоке 7 управления коортриг-гер 95 останется в Нулевом состоя нии, т.е. цикл чтения информации из
узла 15 оперативной памяти не выполдинатным приводом, а через элемент И 72 поступление импульса Запись информации на соответствующий вход этого же счетчика, таким образом.
0
5
0
осуществляется запись информации о величине перемещения в элементарных шагах по координате У. Импульс переноса счетчика-регистра 16 в блок 17 управления устанавливает (фиг. 7) триггер 95 в единичное состояние., а по счетному входу триггера 98 переводит его также в единичное состояние, подготовив коммутатор 4 к передаче информации в блок 6 управления координатным приводом. Единичное состояние триггера 95 дает разрешение на работу устройства в цикле чтения информации о величине перемещения по координате X из узла оперативной памяти и записи ее в счетчик-регистр 16, Цикл прекращается по импульсу переноса из счетчика 90 адреса, который сбрасывает в нулевое состояние триггер 95 и устанавливает в единичное
триггер 97. Последний разрешает работу устройств в цикле пересчета величины перемещения по координате X в количестве элементарных шагов перемещения, заданных задатчиком 19. Устройство производит пересчет величины перемещения по координате X аналогично описанному для координаты У. В конце пересчета счетчик-регистр 16 вьфабатывает импульс переноса, кото- .
5 рый устанавливает триггер 97 в нулевое состояние, ш-шульсы с генератора 93 не проходят через схему И 94 на вычитающие входы счетчиков-регистров 16 и 18. Так как триггер 98 находится
0 в единичном состоянии, в коммутаторе 4 разрешающей потенциал присутствует на выходе элемента И-ИЛИ 71. Информация с выхода счетчика 20 поступает через группы элементов И 67 в блок
5 6 управления координатньм приводом на информационный вход счетчика-регистра 44. Импульс переноса счетчика- регистра 16 через элемент И 73 производит запись этой информации в счет0 чик-регистр 44.
0
Поскольку триггер 98 находится в единичном состоянии, импульс переноса счетчика-регистра 16 на вход уста- новки в единичное состояние триггера 95 через элемент И 103 не пройдет и
триг-гер 95 останется в Нулевом состоянии, т.е. цикл чтения информации из
Поскольку триггер 98 находится в единичном состоянии, импульс переноса счетчика-регистра 16 на вход уста- новки в единичное состояние триггера 95 через элемент И 103 не пройдет и
узла 15 оперативной памяти не выполняется. По заднему фронту импульса пе- переноса счетчика 16 триггер 98 переходит в нулевое состояние (таким образом, он подготовлен к новому циклу пересчета координат X и У), на выходе формирователя 99 импульса вырабатывается импульс Конец пересчета.Этот импульс поступает в коммутатор 4 на вход установки в единичное состояние ю триггера 65. Триггер 65 устанавливается в единичное состояние, при этом он блокирует элементы И 68, 69, 81 и дает разрешающий потенциал на входы элементов И-НЕ 74-77. В зависимости от состояния триггеров регистра 5 с их выходов в блоки 6 и 7 управления координатными приводами поступают управляющие потенциалы + или -. В
блоках 6 и 7.управления координатными 2о ливается в единичное состояние,и в приводами включаются соответствующие элемент 53 ввода информации посту- оптроны 47, 48, которые запускают ти- пает управляющий потенциал. Начи15
подачи шпинделя поступает управляющ потенциал. Через оптрон 84 включае тиристор 86 и срабатывает исполнительный орган 13 привода шпинделя. Датчик 14 обратной связи подает на вход формирователя 87 импульс, по торому с выхода последнего в комму тор 4 на вход установки в нулевое тояние триггера 79 поступает импул Конец сверления. Управляющий пот циал с выхода триггера 79 снимаетс тиристор 86 через оптрон 84 выключ ется . Происходит остановка исполни тельного органа 13 привода шпиндел Импульс Конец сверления поступае также в блок 3 ввода программы на вход уст&новки в единичное состояние триггера 54. Триггер 54 устана
ристоры 51, 52. Срабатывают исполнительные органы 8, 9 координатных приводов, происходит координатное перемещение. С датчиков 10, 11 обратной связи на входы формирователей 43 поступают импульсы. С выхода формирователя 43 импульсы поступают на вычитающие входы счетчиков 44.
По окончании отработки величины перемещения по координатам с выходов счетчиков 44 в блоках 6, 7 управления координатными приводами в регистр, 5 поступают импульсы О счетчика,в котором они устанавливают соответствующие триггеры в нулевое состояние. С выходов элементов И-гНЕ 74-77 исчезают управляющие потенциалы. Тиристоры 51, 52 через оптроны 47, 48 выключаются, происходит остановка испол нительных органов 8, 9 координатных приводов. Потенциалы с выходов триггеров регистра 5 через элементы ИЛИ 62, 63 и ИЛИ-НЕ 64 устанавливают триггер 65 в нулевое состояние. Если с выходов формирователей 43 на входы схемы ИЛИ 80 поступает импульс (т.е. произошло самопроизвольное перемещение), то через элемент И 81 триггер 82 устанавливается в единичное состояние, блокирует триггер 65 и вьщает сигнал Сбой станка на индикацию (на схеме не показана), По заднему фронту импульса с выхода триггера 65 формирователь 78 вырабатывает импульс устанавливающий триггер 79 в единичное состояние, с нулевого выхода которого в блок 12 управления приводом
нается продвижение перфоленты.Если при вводе информации происходит не
25
30
правильная запись ее в регистр 55, то с выхода схемы 57 контроля по паритету на вход триггера 60 посту пает импульс, триггер 60 устанавли вается в единичное состояние и пер водит триггер 54 в нулевое состояни Управляющий сигнал в устройство 53 ввода информации снимается и происх дит останов движения перфоленты. Если же информация вводится пра
35 ВИЛЬНО, то работа устройства продол жается аналогично описанной до поя ления на входе дешифратора 58 кода Конец программы. По этому коду с выхода дешифратора 58 на вход уста
40 новки в единичное состояние триггер 61 поступает импульс, триггер 61 у танавливается и сбрасывает триггер 54. Продвижение перфоленты прекращ ется. Повторный запуск работы прои
45 водится аналогично начальному запу ку,т.е. необходимо нажать кнопку Сброс, а после этого кнопку Пуск
Таким образом, устройство для программного управления станком по
50 воляет управлять различными механи мами, имеющими разный элементарный шаг перемещени й от управляюпщх про грамм, а одинаковым представлением величины перемещения, что позволит
55 использовать для подготовки управл ющих программ одно и то ж е оборудо вание для автоматизированной подго товки перфолент, удешевит техничес кое обслуживание оборудования с ЧП
о ливается в единичное состояние,и в элемент 53 ввода информации посту- пает управляющий потенциал. Начи5
подачи шпинделя поступает управляющий потенциал. Через оптрон 84 включается тиристор 86 и срабатывает исполнительный орган 13 привода шпинделя. Датчик 14 обратной связи подает на вход формирователя 87 импульс, по которому с выхода последнего в коммутатор 4 на вход установки в нулевое состояние триггера 79 поступает импульс Конец сверления. Управляющий потенциал с выхода триггера 79 снимается, тиристор 86 через оптрон 84 выключается . Происходит остановка исполнительного органа 13 привода шпинделя. Импульс Конец сверления поступает также в блок 3 ввода программы на вход уст&новки в единичное состояние триггера 54. Триггер 54 устанавнается продвижение перфоленты.Если при вводе информации происходит не
правильная запись ее в регистр 55, то с выхода схемы 57 контроля по паритету на вход триггера 60 поступает импульс, триггер 60 устанавливается в единичное состояние и переводит триггер 54 в нулевое состояние. Управляющий сигнал в устройство 53 ввода информации снимается и происходит останов движения перфоленты. Если же информация вводится праВИЛЬНО, то работа устройства продолжается аналогично описанной до появления на входе дешифратора 58 кода Конец программы. По этому коду с выхода дешифратора 58 на вход установки в единичное состояние триггера 61 поступает импульс, триггер 61 устанавливается и сбрасывает триггер 54. Продвижение перфоленты прекращается. Повторный запуск работы производится аналогично начальному запуску,т.е. необходимо нажать кнопку Сброс, а после этого кнопку Пуск,
Таким образом, устройство для программного управления станком позволяет управлять различными механизмами, имеющими разный элементарный шаг перемещени й от управляюпщх программ, а одинаковым представлением величины перемещения, что позволит
использовать для подготовки управляющих программ одно и то ж е оборудование для автоматизированной подготовки перфолент, удешевит техническое обслуживание оборудования с ЧПУ,
уменьшит до минимума простои оборудования из-за сбоев и отказов УЧПУ, уменьшит стоимость самих устройств ЧПУ.
Формула изобретения
1. Устройство для программного управления станком, содержащее блок ввода программы, коммутатор, датчик обратной ,связи, первый и второй блок управления координатными приводами, логический блок и задатчик угла поворота системы координат, отличающееся тем, что, с целью расширения функциональных возможностей-путем обеспечения возможности управления механизмами с различным элементарным шагом перемещения, введены блок управления, первьй и второй счечики-регистры, задатчик элементарног шага перемещения, регистр знака,блок оперативной памяти и счетчик импульсов, информационные выходы которого соединены с первыми входами коммутатора, подключенного управляющим входом к :первому выходу блока управле- НИН, второй выход которого соединен с вычитающими входами первого и второго счетчиков-регистров, третий и четвертый выходы - соответственно с входами записи первого и второго счетчиков-регистров, пятые выходы - с адресными входами блока оперативной памяти, шестые выходы - с командными входами блока оперативной памяти, информационные выходы которого подключены к соответствующим входам первого счетчика-регистра и к первым входам блока управления, второй выход которого соединен с задающим входом блока ввода программы, третий вход - с выходом переполнения второго счетчика-регистра и со счетным входом счетчика импульсов, четвертый вход - с выходом переполнения первого счетчика-регистра и с входом импульса переноса коммутатора, информационные входы второго счетчика-регистра подключены к выходам задатчика элементарного шага перемещения,второй информационный вход коммутатора соединен с выходом регистра знака, информационные выходы коммутатора подключены к входам соответствующих блоков управления координатными приводами, задающие входы и первые выходы управления которых соединены с
соответствующими выходами и входами i коммутатора, второй выход управления которого подключен к входу блока уп- равления приводом шпинделя, вход сброса которого соединен с входом сброса устройства для программного управления станком, а выход - с входом установки коммутатора и с управляющим входом блока ввода программы, задающие выходы которого подключены к соответствующим первым входам,задания логического блока, второй вход задания которого соединен с выходом
задатчика угла поворота системы координат, а выход - с информационным входом регистра знака, сбросовый вход которого соединен с входом сброса устройства для программного управления
станком, а установочные входы - с выходом соответствующих блоков управления координатными приводами.
5
2. Устройство по П.1, от л и - чающееся тем, что блок управ0
5
0
ления содержит генератор импульсов, счетчик адреса, распределитель импульсов, дешифратор, три триггера, элемент задержки, формирователь импуль- с ов, группу элементов И и ИЛИ, выход генератора импульсов соединен с первым входом первого и второго элемен- . тов И, вторые входы которых соединены с первым входом распределителя импульсов и с прямыми выходами первого и второго триггеров, прямой выход тре- тьего триггера подключен к первому входу третьего элемента И, к первому выходу управления и через элемент задержки - к второму выходу управления, инверсньш выход - к третьему выходу управления, выход первого элемента И соединен с первым входом первого элемента ИЛИ, с информационным входом распределителя импульсов, с выходом 5 разрешения чтения блока управления и с первым входом счетчика адреса, второй вход которого подключен к второму входу первого элемента ИЛИ и к выходу второго элемента ИЛИ, входы которого соединены с входами блока управления, вход сброса которого соединен с входами сброса триггеров, с входом сброса счетчика адреса, первый выход которого соединен с установочными входами первого и второго триггеров, а вторые выходы - с пятыми выходами блока уп равления, шестые выходы которого соединены с выходами первого элемента ИЛИ и элемента И, третьи выходы - с I
0
5
выходами распределителя импульсов, j второй выход - с выходом второго элемента И, четвертый выход через формирователь импульсов - с выходом третьего элемента ИЛИ, первый вход крторо- го соединен с входом сброса блока управления, второй вход - с третьим входом блока управления, второй вход которого подключен к третьему входу первого триггера, четвертый вход которого соединен с третьим входом вто
рого триггера и через дешифратор - с первым входом блока управления, пятый вход - с выходом третьего элемента И, второй вход которого подключен к четвертому входу второго триггера, к второму входу третьего триггера и к четвертому входу блока управления, седьмой вход которого через четвертый элемент ИЛИ соединен с прямьм выходом первого тригге - - ра.
2. /
ff/rr scfffarrre t/Hfy/
Фиг.2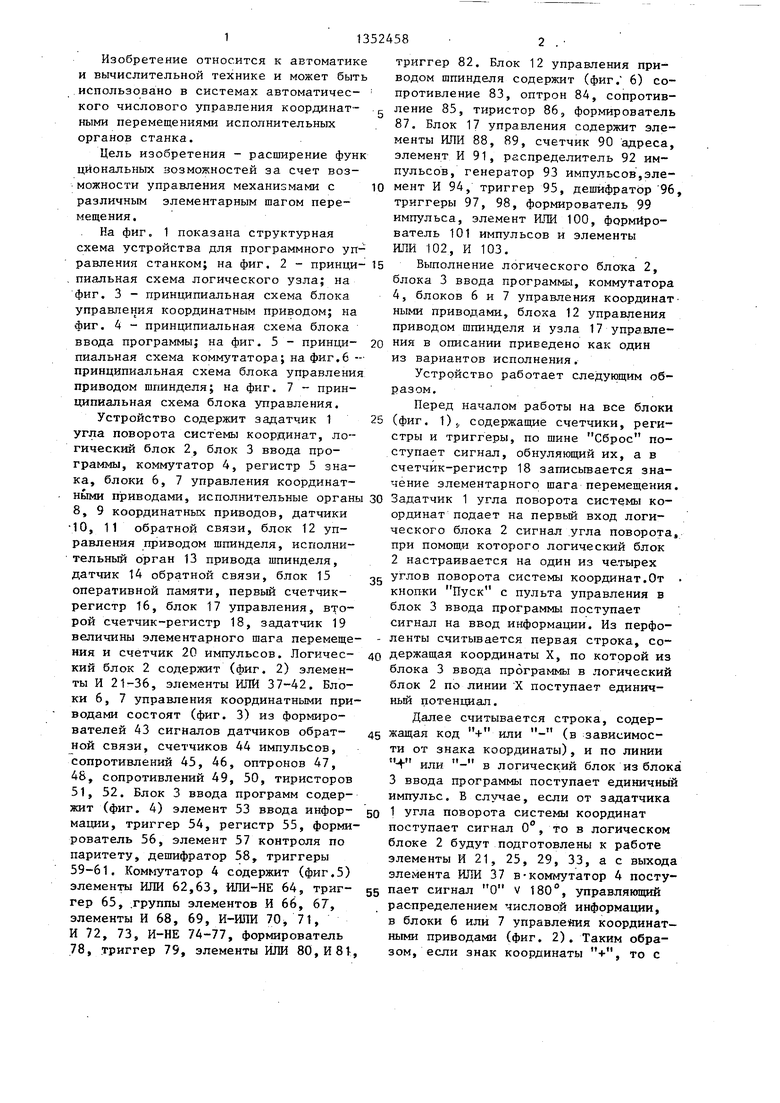
| название | год | авторы | номер документа |
|---|---|---|---|
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Устройство для кинематического дробления стружки на токарных станках с числовым программным управлением | 1981 |
|
SU1004974A1 |
| Устройство для подготовки информации на перфоленте | 1977 |
|
SU684549A1 |
| ИНТЕРПОЛЯТОР | 1970 |
|
SU272415A1 |
| Устройство для кодирования чертежей печатных плат | 1979 |
|
SU858029A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство для отображения векторов на экране электронно-лучевой трубки | 1988 |
|
SU1635171A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1084837A1 |
| Устройство для обнаружения и локализации неисправностей цифровых блоков | 1982 |
|
SU1067507A1 |
| Круговой интерполятор | 1976 |
|
SU651319A1 |
Изобретение относится к области автоматики и вьмислительной техники и может быть использовано в системах автоматического числового управления координатными перемещениями исполнительных органов станка. Цель изобретения - расширение функциональных - возможностей за счет возможности управления механизмами с различным элементарным шагом перемещения. Устройство для программного управления станком содержит блок ввода программ, блок управления, блоки управления координатньмк приводами, блок управления приводом шпинделя, коммутатор, регистр знака, логический блок,счетчик импульсов, счетчики-регистры,блок оперативной памяти, регистр знака, задатчики угла поворота системы координат,, задатчик элементарного шага перемещения, датчики обратной связи. Кроме того, даны примеры конкретного выполнения на логических элементах блоков управления, коммутатора, логического блока ввода программы. Устройство позволяет управлять различными механизмами, имеюшлми разный элементарный шаг перемещения от управляющих программ с одинаковым представлением величины перемещения, 1 з.п. ф-лы, 7 ил.
Злом- Myfrterf
/neyrcfvi
У ffSaoHySfa)
/7t/c
Of/etf r agt/7ftV
54
/fOffett ffcfffpcf
Uf4ny bC
/7pe/3f/ty f
/foff/y0
ZO
6
Ц
a
62 63
d
rr
70
66
56
69
&
72 73
L-$5
U
71
(fjue.S
фие.7. Составитель И. Швец Редактор М. Циткина Техред А,Кравчук
Корректор и, Муска
Заказ 5565/47 Тираж 863Подхтасное
ВНИИЩ. Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Ря тпская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство для двухкоординатного управления | 1974 |
|
SU467326A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Цифровая система программного управления | 1980 |
|
SU924673A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
