as со ел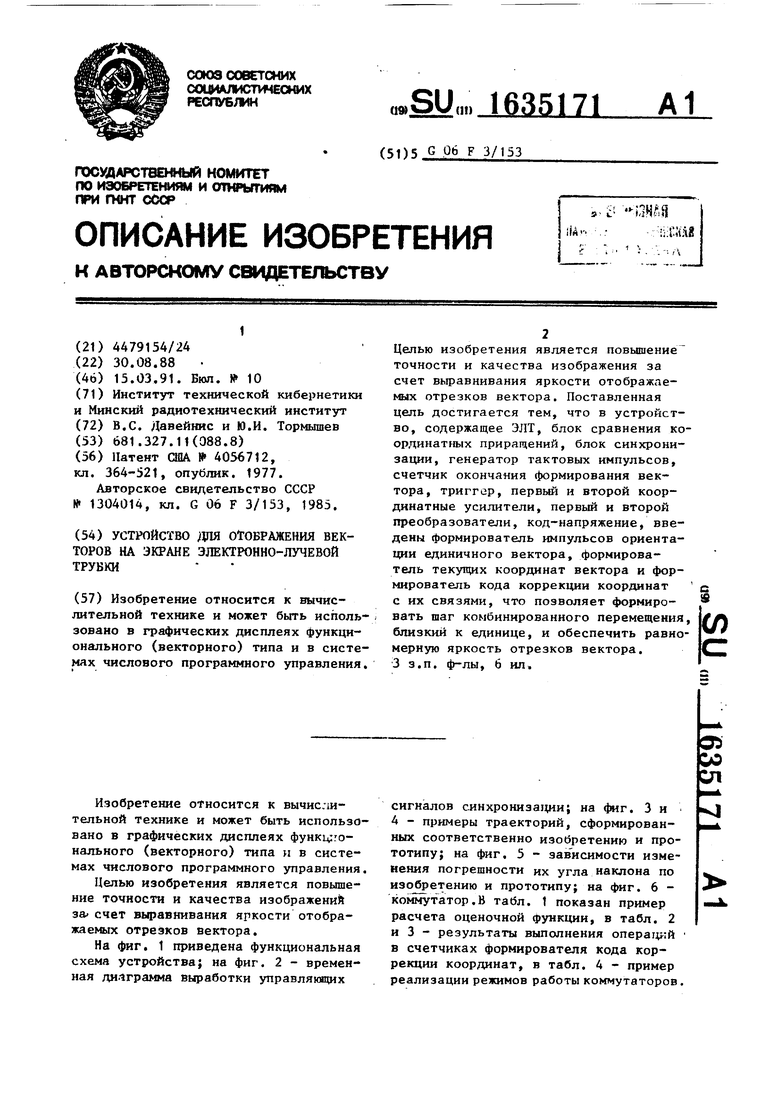
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Устройство для формирования графических изображений | 1982 |
|
SU1037299A1 |
| Линейный интерполятор | 1987 |
|
SU1439532A1 |
| Линейный интерполятор | 1986 |
|
SU1383302A1 |
| Линейный интерполятор | 1988 |
|
SU1522157A1 |
| Устройство для формирования векторов на газоразрядной индикаторной панели | 1988 |
|
SU1642509A1 |
| Устройство для считывания графической информации | 1988 |
|
SU1606980A1 |
| Линейный интерполятор | 1991 |
|
SU1809421A1 |
| Линейный интерполятор | 1985 |
|
SU1298714A1 |
Изобретение относится к вычислительной технике и может быть использовано в графических дисплеях функционального (векторного) типа и в системах числового программного управления. Целью изобретения является повышение точности и качества изображения за счет выравнивания яркости отображаемых отрезков вектора. Поставленная цель достигается тем, что в устройство, содержащее ЭЛТ, блок сравнения координатных приращений, блок синхронизации, генератор тактовых импульсов, счетчик окончания формирования вектора, триггер, первый и второй координатные усилители, первый и второй преобразователи, код-напряжение, введены формирователь импульсов ориентации единичного вектора, формирователь текущих координат вектора и формирователь кода коррекции координат с их связями, что позволяет формировать шаг комбинированного перемещения, близкий к единице, и обеспечить равномерную яркость отрезков вектора. 3 з.п. ф-лы, 6 ил. с S (Л
Изобретение относится к вычислительной технике и может быть использовано в графических дисплеях функционального (векторного) типа и в системах числового программного управления.
Целью изобретения является повышение точности и качества изображения за. счет выравнивания яркости отображаемых отрезков вектора.
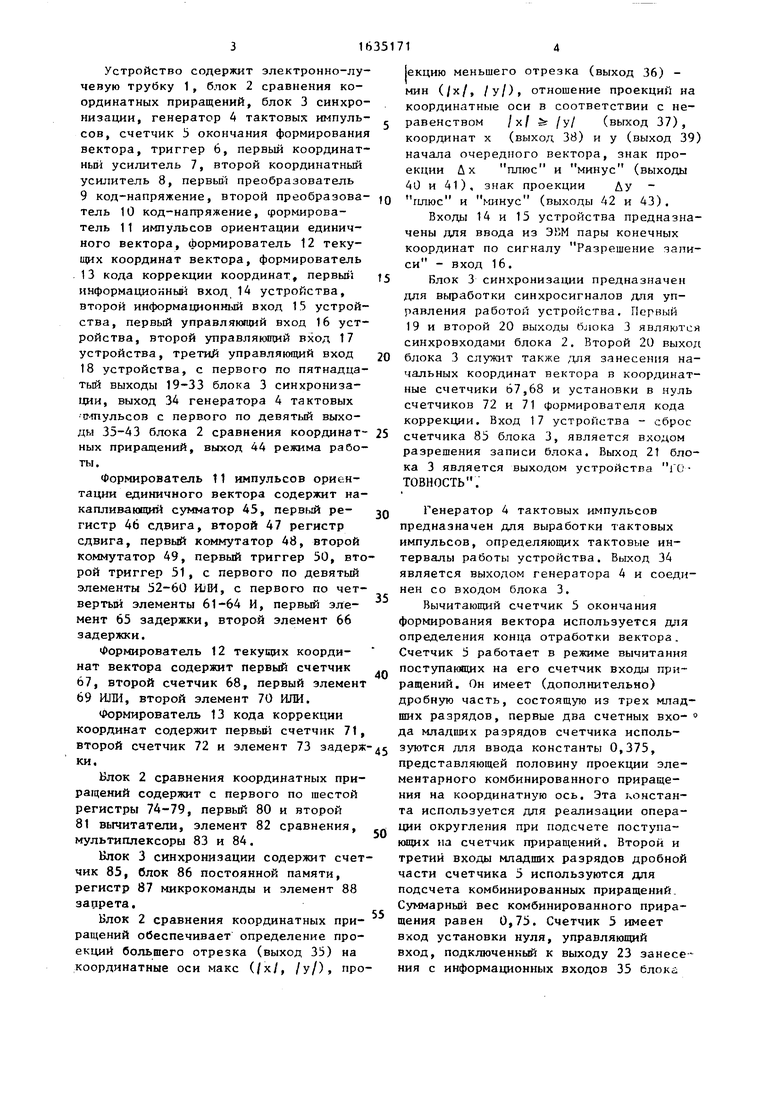
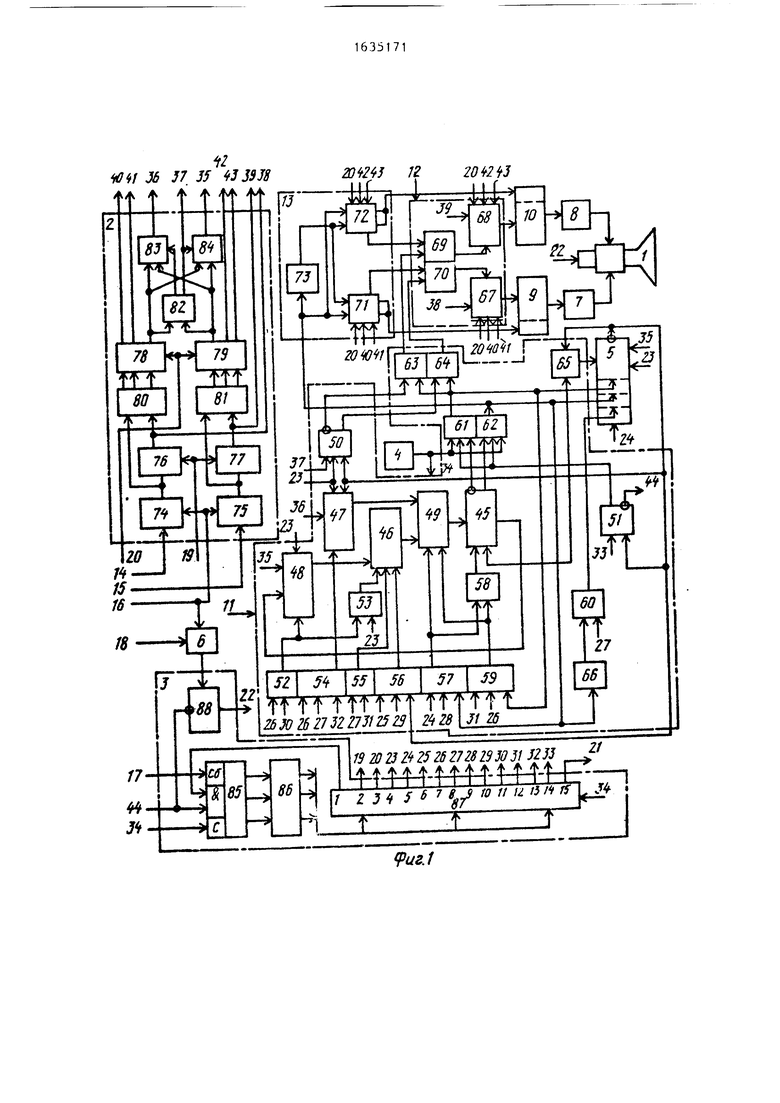
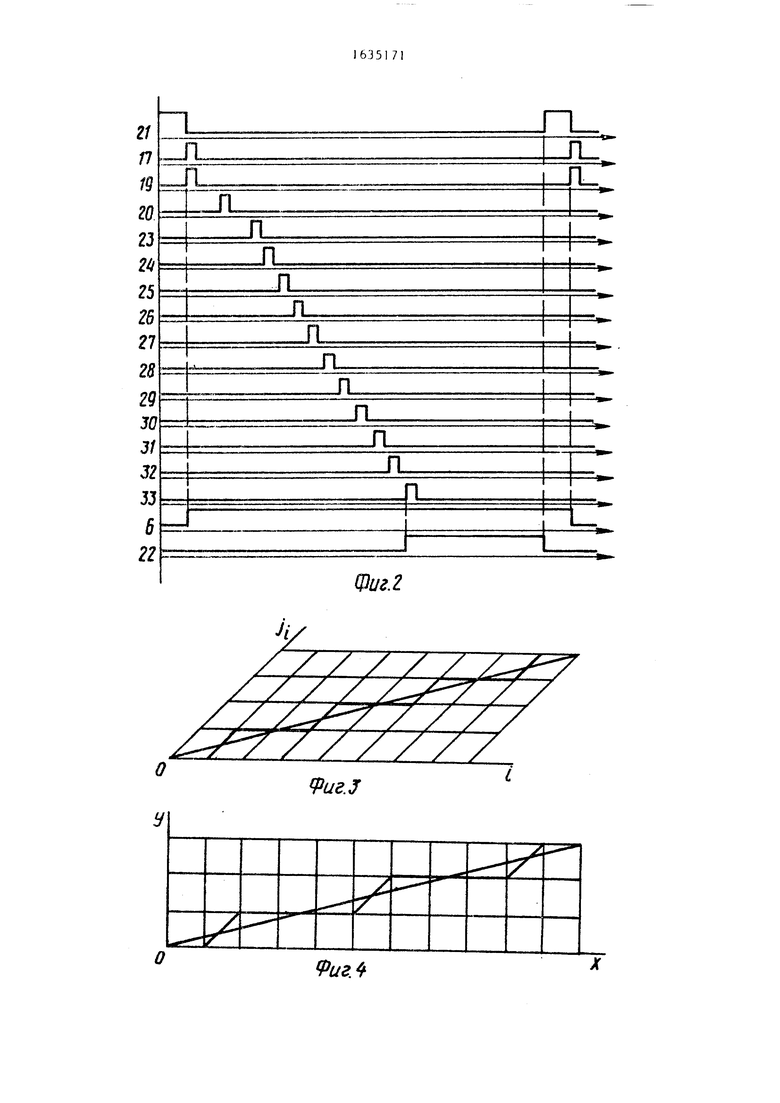
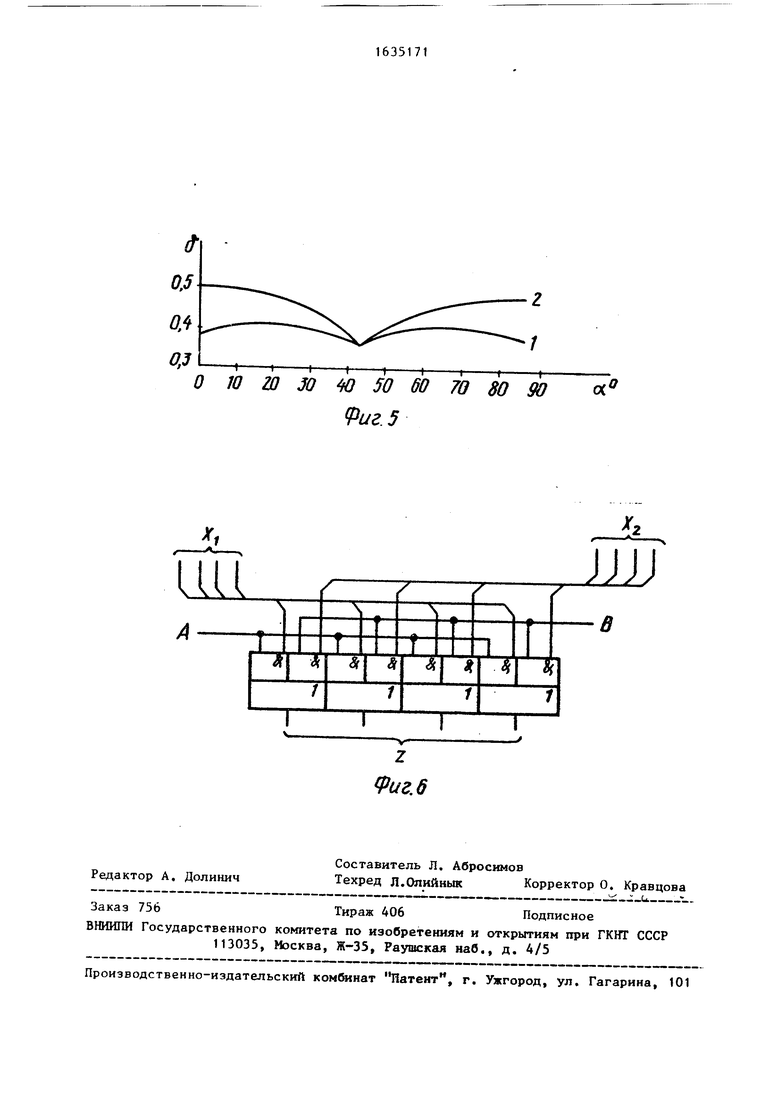
На фиг. 1 приведена функциональная схема устройства; на фиг. 2 - временная диаграмма выработки управляющих
сигналов синхронизации; на фиг. 3 и 4 - примеры траекторий, сформированных соответственно изобретению и прототипу; на фиг. 5 - зависимости изменения погрешности их угла наклона по изобретению и прототипу; на фиг. 6 - коммутатор. табл. 1 показан пример расчета оценочной функции, в табл. 2 и 3 - результаты выполнения операций в счетчиках формирователя кода коррекции координат, в табл. 4 - пример реализации режимов работы коммутаторов.
Устройство содержит электронно-лучевую трубку 1, блок 2 сравнения координатных приращений, блок 3 синхронизации, генератор 4 тактовых импульсов, счетчик 5 окончания формирования вектора, триггер 6, первый координатный усилитель 7, второй координатный усилитель 8, первый преобразователь 9 код-напряжение, второй преобразова- тель 10 код-напряжение, формирователь 11 импульсов ориентации единичного вектора, формирователь 12 текущих координат вектора, формирователь 13 кода коррекции координат, первый информационный вход 14 устройства, второй информационный вход 15 устройства, первый управляющий вход 16 устройства, второй управляющий вход 17 устройства, третий управляющий вход 18 устройства, с первого по пятнадцатый выходы 19-33 блока 3 синхронизации, выход 34 генератора 4 тактовых ;ст-тульсов с первого по девятый выходы 35-43 блока 2 сравнения координат- ных приращений, выход 44 режима работы.
Формирователь 11 импульсов ориентации единичного вектора содержит накапливающий сумматор 45, первый ре- гистр 46 сдвига, второй 47 регистр сдвига, первый коммутатор 48, второй коммутатор 49, первый триггер 50, второй триггер 51, с первого по девятый элементы 52-60 RiM, с первого по четвертый элементы 61-64 И, первый элемент 65 задержки, второй элемент 66 задержки.
Формирователь 12 текущих координат вектора содержит первый счетчик 67, второй счетчик 68, первый элемент 69 ИЛИ, второй элемент 70 ИЛИ.
Формирователь 13 кода коррекции координат содержит первый счетчик 71, второй счетчик 72 и элемент 73 задержки.
Блок 2 сравнения координатных приращений содержит с первого по шестой регистры 74-79, первый 80 и второй 81 вычитатели, элемент 82 сравнения, мультиплексоры 83 и 84.
Блок 3 синхронизации содержит счетчик 85, блок 86 постоянной памяти, регистр 87 микрокоманды и элемент 88 запрета.
Блок 2 сравнения координатных приращений обеспечивает определение проекций большего отрезка (выход 35) на координатные оси макс (/х/, /у/), про
Q 5 0 5
Q
5
0
0
|екцию меньшего отрезка (выход 36) - мин (/х/, /у/), отношение проекций на координатные оси в соответствии с неравенством /х/ ёг /у/ (выход 37), координат х (выход 38) и у (выход 39) начала очередного вектора, знак проекции Дх плюс и минус (выходы 40 и 41), знак проекции Ду - плюс и минус (выходы 42 и 43).
Входы 14 и 15 устройства предназначены для ввода из ЭЈМ пары конечных координат по сигналу Разрешение -записи - вход 16.
Блок 3 синхронизации предназначен для выработки синхросигналов для управления работой устройства. Первый 19 и второй 20 выходы блока 3 являются синхровходами блока 2. Второй 20 выход блока 3 служит также для занесения начальных координат вектора в координатные счетчики 67,68 и установки в нуль счетчиков 72 и 71 формирователя кода коррекции. Вход 17 устройства - сброс счетчика 85 блока 3, является входом разрешения записи блока. Выход 21 блока 3 является выходом устройства ГОТОВНОСТЬ.
Генератор 4 тактовых импульсов предназначен для выработки тактовых импульсов, определяющих тактовые интервалы работы устройства. Выход 34 является выходом генератора 4 и соединен со входом блока 3.
Вычитающий счетчик 5 окончания формирования вектора используется для определения конца отработки вектора. Счетчик 5 работает в режиме вычитания поступающих на его счетчик входы приращений. Он имеет (дополнительно) дробную часть, состоящую из трех младших разрядов, первые два счетных вхо- ° да младших разрядов счетчика используются для ввода константы 0,375, представляющей половину проекции элементарного комбинированного приращения на координатную ось. Эта константа используется для реализации операции округления при подсчете поступающих на счетчик приращений. Второй и третий входы младших разрядов дробной части счетчика 5 используются для подсчета комбинированных приращений. Суммарный вес комбинированного приращения равен 0,75. Счетчик 5 имеет вход установки нуля, управляющий вход, подключенный к выходу 23 занесения с информационных входов 35 блока
516
2 начального значения большей проекции отрезка на координатную ось.
Вход 18 - третий управляющий вход устройства - является счетным входом триггера 6, предназначенного для определения необходимости визуализации (подсвета) текущего вектора на экране ЭЛТ 1 .
Выход 22 блока 3 предназначен для управления модулятором ЭЛТ 1.
Сумматор 45 является сумматором накапливающего типа с циклическим переносом единицы переполнения из старшего разряда в младший, что дает возможность осуществлять суммирование с содержимым сумматора чисел, представленных в прямом и обратном кодах. В сумматоре 45 в процессе работы по отработке вектора хранится значение оценочной функции, определяемой выражением (1). На информационный вход сумматора 45 через второй коммутатор 49 поступают либо код положительного числа, слагаемого из первого регистра
46сдвига, либо код отрицательного числа, представленного в обратном коде, слагаемого из второго регистра
47сдвига. Сумматор 45 имеет входы, обеспечивающие процесс установки его в нуль до начала работы и после отработки очередного вектора с выхода элемента 65 задержки.
Кроме того, сумматор 45 имеет знаковый разряд, состояние которого указывает на знак хранимого в сумматоре числа. Единичное состояние знакового разряда сумматора 45 соответствует отрицательному значению числа, находящемуся в сумматоре 45, нулевое - положительному.
Первый 46 и второй 47 регистры служат для ввода в них исходных данных о проекциях отрезка на координатные оси. В регистре 46 вводится проекция большего, а в регистр 47 - меньшего отрезка. Затем в регистре 46 формируется значение проекции отрезка в новой косоугольной системе координат, используемое затем ПРИ формировании шаговой траектории. Регистры 46 и 47 сдвига имеют управляющие входы установки в нуль, занесения параллельным кодом, сдвига вправо. Информационные входы регистра 46 соединены с выходом первого коммутатора, а регистра 47 - с выходом 36 блока 2. Причем занесение меньшего отрезка на координатные оси в регистр 47 осуществляется со
716
сямигом на 3 рачпяда и стор чу мллл- ших разрядов ( .(. злписыв. и тек 0,125 мин (/::/, /У/), чт° обегпечипаст соответствующей коммутацией рачрчдоп на входе регистра.
Первый 48 и второй 49 коммутаторы представляют собой двухканальные коммутаторы, обеспечивающие выбор одного из двух информационных каналов
на выход коммутатора 48,49 при подаче на управляющие входы соответствующих сигналов выбора каналов.
Съемная реализация и режимы работы коммутаторов приведены на фиг. 6 и в табл. 4.
Вторые информационные входы первого коммутатора 48 подключены так, что занесение кода координат большей
проекции отрезка на координатную ось (выход 35 блока 2) осуществляется со сдвигом на 3 разряда в сторону младших разрядов (т.е. записывается 0,125 макс (, ) (на фиг. 6 внешняя
коммутация, осуществляющая этот сдвиг, не показана).
Триггер 50 знака служит для формирования сигналов управляющих коммутацией приращений по двум каналам, соответствующих перемещению электронного луча вдоль осей координат, X и Y. Отношение проекции определяет единичное состояние триггера 50, в которое он устанавливается сигналом,
поступающим с выхода 37 блока 2.
Триггер 51 режима работы служит для формирования временного интервала, необходимого для отработки очередного вектора.
Элементы 52-60, 69, 70 HJEl используются для сборки сигналов, используемых для управления работок отдельных частей устройства.
С первого по четвертый элементы
5 61-64 И выполняют обычные логические функции.
Элемент 66 задержки используется для задержки сигнала на время, необходимое для установления переходных
процессов в счетчике конца формирования вектора.
Элемент 65 задержки служит для предотвращения состязания сигналов при установке счетчика 5 в нулевое
состояние и для обеспечения процесса установки в нуль накапливающего сумматора 45.
Первый и второй 67,68 счетчики координат X и Y служит для определения
текуцих координат электронного луча на экране ЭЛТ }.
Формирователь 13 кода коррекции координат предназначен для формирова- ния кода коррекции по координатам X и У при одновременном перемещении луча по координатным осям с шагом квантования 0,75 от величины единичной длины.
Выход 36, - информационный выход илока 2 сравнения координатных приращении - предназначен для ввода во второй регистр 47 кода проекции меньшего отрезка вектора мин (А/, ) на координатные оси.
Выход 37 блока 2 служит для установки триггера 50 знака в единичное состояние, если отношение между координатами X и Y определяется нестро- гим неравенством .
Выходы 38 и 39 блока 2 служат для
устранения накопившейся погрешности в конце построения вектора, установки чальных координат следующего век- п.ра в цепочке векторов.
Выходы 40 и 41 блока 2 служат дпя определения направления счета первого координатного счетчика 67 и счетчика 71 формирователя 13.
Выходы 42 и 43 блока 2 служат для определения направления счета второго координатного счетчика 68 и счетчика 72 формирователя 13.
Выход 44 триггера 51 режима рабо- ты предназначен для управления счетом счетчика 85 блока 3 и элементом 88 запрета. Во время отработки вектора работа счетчика 85 блокируется, а сигнал подсветки (выход 22 блока 3) формируется элементом 88 запрета 84 по состоянию триггера 6,
Выходы 23-32 блока 3 являются управляющими сигналами, обеспечивающими формирование необходимых началь- ных значений параметров в сумматоре 44, первом 46 и втором 47 регистрах.
Выход 33 блока 3 является сигналом- запуска для отработки заданного вектора. Этим сигналом устанавливается в единичное состояние триггер 51 режима работы, который сбрасывается сигналом с выхода старшего разряда счетчика 5 окончания формирования вектора.
Техническая реализация блока 2 сравнения координатных приращений аналогична технической реализации того же блока 7 прототипа.
, Q
5
0
5
0
Q
5
Q
5
Регистры 74 и 75 блока 2 являются регистрами значений координат X и Y конца очередного вектора.
Регистры 76 и 17 блока 2 являются регистрами значений киордпьат X и У, начала очередного вектора, либо конца предыдущего вектора, информационные выходы которых являются выходами 38 и 39 блока 2„
Регистры 78 и 79 блока 2 являются регистрами значения модулей приращений по осям X и Y с их знаками, выставленными соответственно на выходы 40 и 41 блока 2 - знаки плюс и минус по оси координат X и выходы 42 и 43 - знаки плюс и минус по оси Y.
Вычитатели 80 и 81 предназначены для определения модулей проекций и их знаков по осям координат.
Элемент 82 сравнения предназначен для сравнения значений модулей координатных приращении и управления мультиплексорами 83 и 84 так, чтобы на первый выход 35 блока 2 поступило большее координатное приращение макс (/X/, /Y/), на второй выход 36 блока 2 меньшее мин (/Xf, /Y/), на (третьем выходе 37 блока 2 - отношение проекций на координатные оси в соответствии с неравенством /X/ i /Y/.
Вход 14 устройства соединен с информационными входами регистра 74, выходы которого соединены со входами регистра /6 и первыми входами вычита- теля 80. Вход 15 устройства соединен с информационными входами регистра 75, выходы которого соединены со входами регистра 77 и первыми входами вы читателя 81. Вход 16 устройства соединен с управляющими входами занесения в регистры 74 и 75. Выход 19 блока 3 соединен с управляющими входами занесения в регистры 76 и 77, выходы которых объединены соответственно со вторыми входами вычитателеи 80 и 81, в свою очередь выходы которых соединены соответственно со входами регистров 78 и 79. Выход 20 блока 3 соединен с управляющими входами занесения в регистры 78 и 79. Выходы регистра 78, определяющие значения модулей координат приращений по оси X, соединены г первыми входами элемента 82 сравнения и мультиплексоров 83 и 84. Выходы регистра 79, определяющие значение модулей координат приращений по оси Y,., соединены со вторыми входами элемента 82 сравнения и мультиплексоров 83 и 84.
Элемент 82 сравнения 78 формирует на входы мультиплексоров 83 и 84 два управляющих сигнала, которые коммутируют на выход мультиплексора 83 модул меньшей проекции на координатные оси, а на выход мультиплексора 84 - модуль большей проекции, при этом элемент 82 формирует на выходе 37 сигнал, указывающий на отношение проекций на координатные оси в соответствии с неравенством /X/ . /Y/.
Техническая реализация блока 6 син хронизации в предлагаемом устройстве аналогична такому же блоку у прототипа.
Счетчик 85 служит для перебора адресов блока 86 памяти, предназначен- ного для записи микропрограммы выработки синхросигналов. При этом выходы счетчика соединены со входами блока 86 памяти, выходы которого соединены со входами регистра 87 микропро- граммы, выходы которого являются выходами блока 3 синхронизации. Вход разрешения записи соединен со входом установки в нуль счетчика 85, счетный вход которого и тестовый вход регист- pa микрокоманд соединены с выходом 34 тактового генератора 4. Входы блокировки счета в счетчике 85 соединены по схеме И с выходом регистра 87 и инверсным выходом триггера 51 режима работы, соединенного также с инверсным входом элемента 88 запрета, второй вход которого соединен с выходом триггера 6 подсветки вектора. Выход 22 элемента 88 запрета соединен с модулятором ЭЛТ 1.
Двухразрядные реверсивные счетчики 71 и 72 предназначены для формирования кодов коррекции соответственно по координатам X и Y при одновременном перемещении луча по координатным осям с шагом квантования 0,75 от величины шага единичной длины. Гнсрорма- ционные выходы счетчиков соединены со
входами дополнительных разряде преобразователей 9,10 код-напряжение, а сигналы переноса (переполнения) счетчиков через элементы 70 и 69 - со счетными входами координатных счетчиков 67 и 68. Вес первых младших разрядов счетчиков формирователя 12 и соответственно дополнительных младших разрядов преобразователей кодQ
Q 5 g Q
с
5
0
5
напряжение равен 0,25, а вторых - 0,5.
Элемент 73 задержки служит для задержки сигнала, поступающего на СЧРТ- ные входы вторых счетчиков 71 и 72 на время переходных процессов по выполнению операций в первом разряде и отработке сигналов внутреннего переноса между первым и вторым разрядами счетчиков.
Физическую сущность изобретения можно пояснить следующим образом.
Известные схемы для формирования траектории вектора с целью уменьшения погрешности формирования используют диагональные перемещения, при этом длина диагонали больше основного шага в -$2 раз. Недостатком такого подхода является невысокая точность приближения формируемой траектории к траектории исходной прямой. Избежать этого недостатка можно, если длину диагональных перемещений сделать близкой к шагу единичной длины. При этом уменьшение погрешности формируемо1, траектории вектора вытекает из того факта, что чем меньше элементарный шаг, тем выше точность приближения. Заменяя диагональные шаги длиной 2 от основного шага на близкие к единице диагональные шаги достигаем повышения точности формирования вектора, что и составляет физическую сущность изобретения .
В рассматриваемом техническое решении комбинированное диагональное перемещение осуществляется одновременным перемещением вдоль каждой из координатных оссЛ X л Y на величин 0,75 основного шага единичной длины. Поскольку диагональное перемещение в отом случае является гипотенузой прямоугольного равноосдренного треугольника, то величина гипотенузы этого треугольника, а значит, и линейного перемещения составит ,75x-J2 1,06000, т.е. величину близкую к шагу единичной длины.
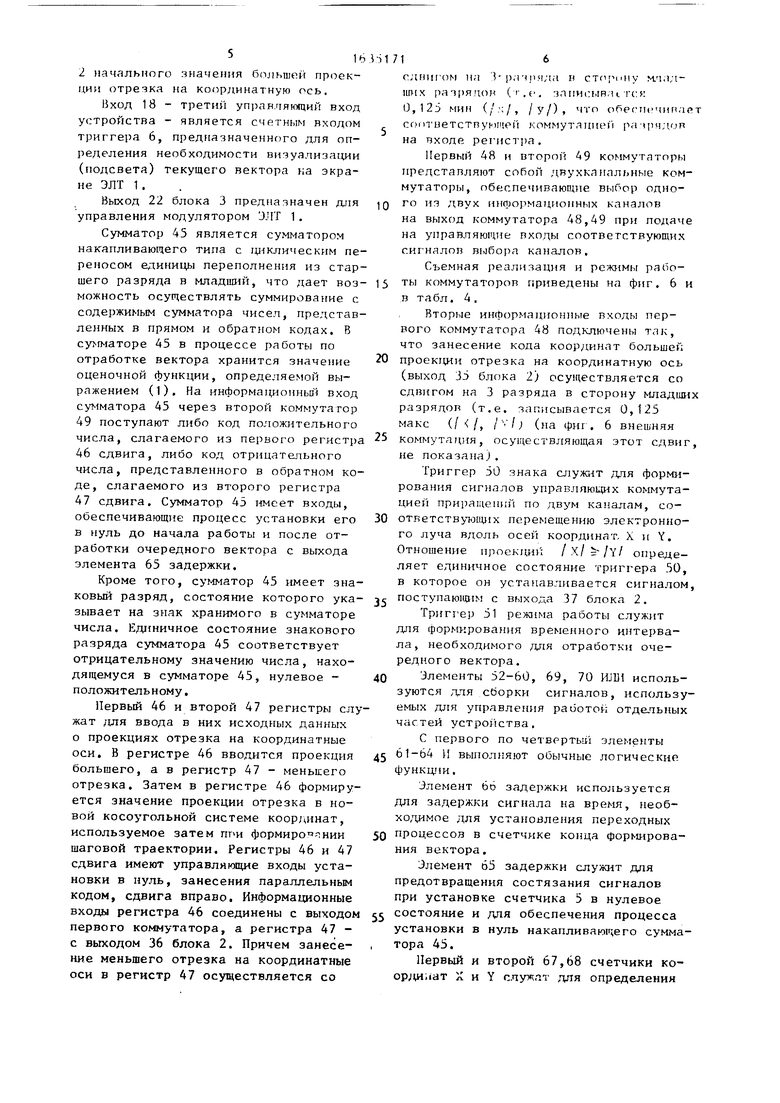
Значение погрешности известных устройств, обеспечивающих предельно минимальную погрешность интерполирования определяется выражением о 0,5 cosc, Oi , а значение погрешности изобретения - выражением Q 0,3963 sin (71°3: + о) . Здесь & - угол наклона формируемого вектора к координатной оси X. Из приведенных выражений видно, что макси-
мальные значения погрешностей в первом и втором случаях будут соответственно равны 0,5 и 0,3963. Графически вид этих погрешностей 1 и 2 приведен на фиг. 5. Изобретение обеспечивает меньшую погрешность формирования вектора, кроме того, согласно изобретению формируемое изображение можно поворачивать на угол, кратный углу 45ff, без дополнительного пересчета координат, что невозможно у известных струк
гь,ч« rj;,;-W если FR; °;
j; + i,i Fj;,;+°.73 (), если FJ;I; O.
F;: ; F
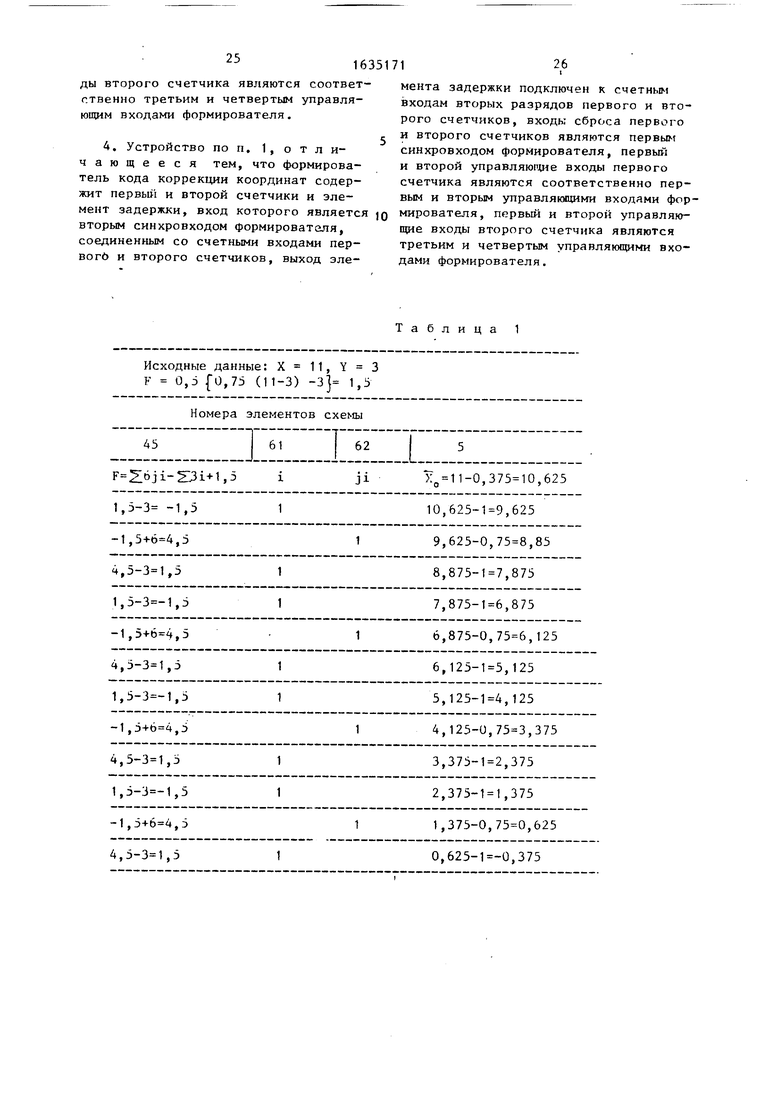
Начальное значение оценочной функции определяется в соответствии с выражением ,20
Ffl 0,5fo,75 (/X/-/Y/) -/Y/j. (2)
2
Конец формирования вектора определяется по суммарному количеству шагов, выполненных вдоль большей проекции отрезка с учетом веса каждого шага. Величина оставшегося пути, который необходимо пройти до конца максимальной проекции отрезка на координатную 3 ось X, определяется в соответствии с выражением
X |Х/ - 0,375 - Zuji -STfti. (3)
.- --,3
При X 0 вычисления прекращаются и траектория считается сформированной.
Если /Х| /Y/, то в этом случае в выражениях (1)-(3) /X/ заменяется 4 на / Yif, fY I заменяется на / X/, i заменяется на j и Д1 заменяется на Д j.
Устройство работает следующим образом.Д
Но сигналу готовность на выходе 21 устройства (см. временную диаграмму на фиг. 2) осуществляется загрузка координат конца очередного вектора, входящего в цепочку векторов. Для этого на входы t4 и 15 устройства на ЭВМ поступают значения пары конечной координат, а на вход 16 - сигнал Разрешение записи, который вызывает запись этих координат в регистры 74 и 75. Одновременно с этим бит разрешения подсветки данного вектора заносится в триггер 6 по входу 18. Далее осуществляется вычисление модулей котур, допускающих поворот изображения без пересчета только на угол, кратный углу 90°.
Изобретение работает на основе метода оценочной функции. Если обозначить большую проекцию через X ({,/1.1 /V/), то гда выражение оценоч- ной функции, используемой для формирования шаговой траектории, будет описываться следующим выражением:
(1)
0
5
0
5
0
С
-
ординат приращений на вычитателях 80 и 81 путем вычитания из значений конечных координат значений начальных координат из регистров 76 и 77. Кроме модулей приращений вычитатели выдают также разряды знака. Результаты вычитания заносятся в регистры 78 и 79 по сигналу на выходе 20 блока 3 синхронизации. Элемент 82 сравнивает значения модулей координатных приращений и управляет мультиплексорами 83 и 84 так, чтобы с первого выхода 35 блока 2 на информационный вход первого коммутатора 48 и на информационные входы счетчика 5 окончания формирования вектора поступило большее координатное приращение, а со второго выхода 36 блока 2 на информационные входы второго регистра 47 - меньшее. Сигнал с выхода 37 блока 2 (выход элементы 82 сравнения), указывающий знак отношения больше или равно между координатами XHY (/X/Ј: /Y/), поступает на вход триггера 50 знака.
На входы управления направлением счета координатных счетчиков 67,68 по координатам X и Y и в формирователь 13 кода коррекции поступают кодьь знаков приращений соответственно с выходов 40,41 и 42,43 блока 2.
Блок 3 синхронизации вырабатывает управляющие сигналы в соответствии с микропрограммой, записанной в блоке 86 памяти и реализующей временную диаграмму, приведенную на фиг. 2. Перебор адресов блока 84 памяти осуществляется счетчиком 85. В исходном состоянии сумматор 45 первый 46 и второй 47 регистры сдвига, счетчик 5 окончания формирования вектора, триггер 50 знака и триггер 51 режима работы и формирователь 13 установлены в нулеп16
вое состояние (установка в исходное состояние до конца начала работы устройства на схеме не показана). Но сигналу на входе 17 Разрушение запуска счетчик 85 устанавливается в О, если нет блокирующего сигнала с выхода регистра 87 или сигнала запрета на входе 44 блока 3 синхронизации начинает счет. Первый 19 и второй 20 син- хросигналы блока 3 управляют работой блока 2 сравнения координатных приращений.
При этом синхросигнал с выхода 20 блока 3 сбрасывает в нуль счетчики 71 и 72 формирователя 13 и поступает на входы управления записью с установочных входов счетчиков 67,68, в которые заносится содержимое регистров 76 и 77 - коды координат начала оче- редкого вектора. По синхросигналу с выхода блока 23, блока 3 осуществляется запись через первый коммутатор 48 в первый регистр 46 кода большей проекции отрезка на координатную ось и непосредственно во второй регистр запись меньшей проекции отрезка. Причем занесение в регистры 46,47 сдвига осуществляется со сдвигом на 3 разряда в сторону младших разрядов, т.е. в регистр 46 записывается 0,125 макс (/X/, /Y/), а в регистр 47 - 0,125 мин (/X/, /Y/).
Этим же синхросигналом в счетчик 5 записывается код большей проекции отрезка на координатную ось, а триггер 50 при условии устанавливается в состояние единицы.
Для примера условимся, что /X/i/Y/ тогда в первом регистре 46 сдвига за- пишется 0,125 /X/, во втором регистре 47 сдвига - 0,125 /Y/, в счетчике
5 - /X/.
i
Синхросигнал с выхода 24 блока 3 поступает через шесток элемент
57ИЛИ на управляющий вход второго коммутатора 49, коммутируя содержимое первого регистра 46 на сумматора 45, и через седьмой элемент
58ИЛИ на управляющий вход записи в сумматор 45. В сумматоре 45 записывается значение 0,125 /X/. Одновременно этот же сигнал поступает на вход вычитания младшего (дополнительного) разряда счетчика 5 из его содержимого значения числа, равное весу младшего разряда счетчика, в результате чего содержимое счетчика 5 уменьшится на
7114
эту величину и становится равным (/X/ - 0,125).
Синхросигнал с выхода 25 блока 3 поступает через пятый элемент 56 ИЛИ на управляющий вход установки в нуль первого регистра 46, обнуляя его, одновременно этот же сигнал поступает через восьмой элемент 59 ИЛИ на управляющий вход второго коммутатора 49, разрешая перенос с инверсных выходов содержимого второго регистра 47 на вход сумматора 45 и через седьмой элемент 58 ИЛИ на управляющий вход записи в сумматор 45.В сумматоре 45 записывается значение разности проекций отрезков на координатные оси, равное S 0,125 (/X/-/Y/).
После установпения переходных процессов в сумматоре 45 на выходе 26 блока 3 вырабатывается синхросигнал, который через первый элемент 52 ШШ поступает на управляющий вход первого коммутатора 48 и через второй элемент 53 ИЛИ на вход записи параллельного кода в первый регистр 46. В результате в регистре 4b записывается содержимое сумматора равное 0,125 (/X/-/Y/).
Одновременно сигнал поступает через третий элемент 54 ИЛИ на управляющий вход второго регистра 47, сдвигая его содержимое на один разряд вправо, устанавчивая значения регистра 47, равное 2.0,125 /Y/ 0.25JY/, а также через девятый элемент 60 ИДИ на вход вычитания выборного (дополнительного) младшего разряда счетчика 5, вычитая ия содержимого счетчика 5 вес второго млчдшего разряда счетчика, в результате его содержимое становится равным (/X/ - 0,125) - 0,25 /X/ - 0,375.
После установления переходных процессов в регистрах 46 и 47 блок 3 вырабатывает синхросигнал на выходе 27, поступающий через элементы 54,55 ИЛИ соответственно на управляющие входы второго и первого регистров 47 и 46, в результате содержимое регистров 46,7 сдвигается на один разряд вправо и становится равным в регистре 46; 2.0,125 (/X/-/Y/) 0,25. (fX/-/Y/), а в регистре 47: 2.0,25 /Y/ 0,5/Y/.
Следующий синхросигнал с выхода 28 блока 3 проходит через элемент 57 1ЫИ на вход управления вторым коммутатором 49, разрешая перенос содержимого первого регистра 46 в сумматор
45 и через элемент 58 ИЛИ - на вход управления суммирования. В результате содержимое сумматора 45 суммируется с содержимым регистра и становится равным 21 0,125 (/X/-/Y/) + 0,25 (/X/-/Y/) 0,375 (/X/-/Y/).
Синхросигнал с выхода 29 блока 3 проходит 4epej элемент 56 ИЛИ на уп- Р...ВЛЛЮЩИЙ вход первого регигтра 46 и обнуляет его.
Синхросигнал с выхода 30 блока 3 проходит через элемент 52 К)1И на управляющий вход коммутатора 48 и через элемент 53 ИЛИ на вход занесения кода в регистр 46. В результате в регистр 4 с записывается содержимое сумматора ; i-je 0,37 (/л/-, У/).
Синхросигнал с выхода 31 блока 3 проходит через элемент 55 ИЛИ на вход управления сдвигом регистра 465сдвигая ею содержимое на один разряд вправо, которое становится равным 2.0,375 (/X/- MYh 0,75 (/xf-lY/).
Одновременно синхросигнал с вы- . .и 31 проходит через элемент ° ИЛИ на вход управления занесением через коммутатор 49 содержимого pt- ч. 47 в сумматор 45 и через эле- ней г 59 JD1H 37 на сход управления сум , р йплисм. С е сумматора 45 .. становится равным S - 0,375 (/X/-/Y/) - 0,5/Y| F0 . На этсм формирование начального значения оценочной функции в сумматоре 45 за- чапчивается.
Синхросигнал с выхода 32 блока 3 проходит через элемент 54 ИЛИ ня вход управления сдвигом регистра 47, сдвигал его содержимое на один разряд вправо, которое становится равным
20,5 .
Таким образом, все начальные значения параметров в сумматоре 45, регистрах 46 и 47, счетчике 5 сформированы:
в сумматоре 45: F 0,375 (/X/-/-Y/) - 0,5 /Yf;
л первом регистре 46:
0,75 (/X/ -/Y/);
во втором регистре 47:/Y/;
в счетчике 5: /X/- 0,375.
Затем синхросигнал с выхода 33 блока 3 поступает на прямой вход триггера 51 режима работы и включает его в единичное состояние, запрещая работу счетчика 85 блока 3 и разрешая прохождение тактовых импульсов через элемент 61 И. С этого момента начина0
5
0
5
0
5
0
5
0
5ется непосредственная отработка ыаг.™ вой траектории вектора и в зависимости от условий на входе элемента 88 запрета блока 3 с выхода 22 на модулятор JJIT поступает сигнал, определяющий необходимость подсчета вычерчиваемого на экране ЭЛТ 1 вектора.
При этом, время между вторым и четырнадцатым синхросигналами с выходов 20 и 32 блока 3 должно быть не меньше времени, необходимого для установления значения токов в отклоняющей г.истеме, соответствующим начальным координатам вектора.
В зависимости от знака числа, находящегося в сумматоре 45, изменяется остояние знакового разряда сумматора, трицательному значению числа соответствует единичное состояние знакового разряда, положительному или нулевому значению соответствует нулевое состояние знакового разряда сумматора 45. Если содержимое сумматора 45 положительно или равно нулю, разрешающие потенциалы будут присутствовать на всех входах логического -элемента 62 И В зависимости от этого импульсы с генератора 4 тактовых импульсов будут Проходить на выход соответствующего Биологического элемента 61 И или 62 И. При положительном или нулевом -значении числа, находящегося в суммтто- ре 45, импульсы генератора 4 тактовых импульсов будут проходить на выход логического элемента 61 И и через элемент 59 ИЛИ - на управляющие входы ком- коммутатора 49 и через элемент 58 ИЛИ - на вход сумматора 45, вызывая перенос содержимого регистра 47 в сумматор 45. С каждым таким переносом в соответствии с выражением (1) из содержимого сумматора 45 вычитается со- держимое регистра 47. Этот процесс продолжается до тех пор, пока содержимое сумматора 45 не станет отрицательным. При отрицательном значении содержимого сумматора 45 импульсы генератора 4 тактовых импульсов проходят на выход логического элемента 62 И и через элемент 57 ИЛИ поступают на управляющие входы коммутатора 49 и через элемент 58 ИЛИ на вход сумматора 45, вызывая перенос содержимого регистра 46 в сумматор 45. После каждого такого переноса содержимое сумматора в соответствии с выражением (1) суммируется с содержимым регистра 46. Этот процесс продолжается до
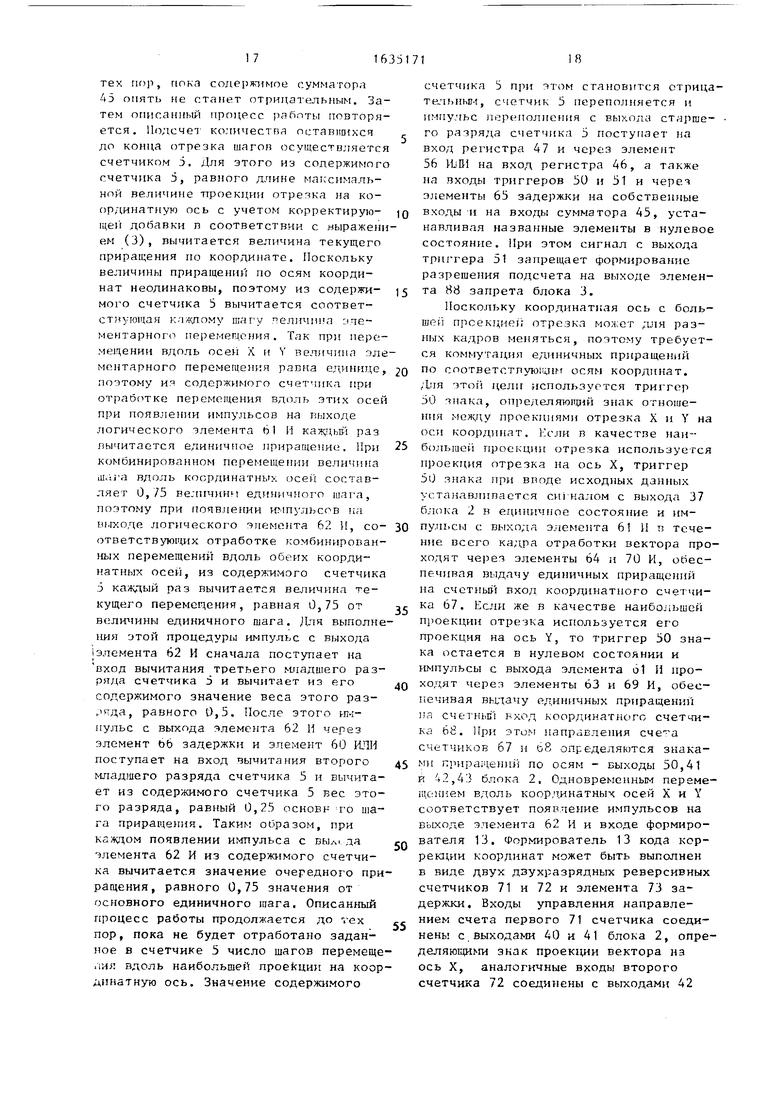
тех пор, пока содержимое сумматоре 43 опять не станет отрицательным. Затем описанный процесс работы повторяется. Подсчет количества оставкотхсч до конца отрезка шагов осуществляется счетчиком 5. Для этого из содержимого счетчика 5, равного длине максимальной величине проекции отрезка на координатную ось с учетом корректирующей добавки п соответствии с ныражени ем (3), вычитается величина текущего приращения по координате. Поскольку величины приращений по осям координат неодинаковы, поэтому из содержимого счетчика 5 вычитается соответствующая каждому шагу еличина иле- ментарного прремепения. Так при перемещении вдоль осей X и Y величина эле мгнтарного перемещения равна единице, поэтому ич содержимого счетчика при отработке перемещения вдоль этих осей при появлении импульсов на выходе логического элемента Ы И каждый раз вычитается единичное приращение. При комбинированном перемещении величина вдоль координатных осей составляет 0,/5 велнчинн единичного шага, поэтому при появцении импульсов ил выходе логического элемента 62 И, соответствующих отработке комбинированных перемещении вдоль обеих координатных осей, из содержимого счетчика 5 каждый раз вычитается величина текущего перемещения, равная 0,75 от величины единичного шага. Для выполнв ния этой процедуры импульс с выхода элемента 62 И сначала поступает на вход вычитания третьего младшего раз- ояда счетчика 5 и вычитает из его
содержимого значение веса этого раз- да, равного 0,5. После этого импульс с выхода элемента 62 И через элемент bb задержки и элемент 60 ИЛИ поступает на вход вычитания второго младшего разряда счетчика 5 и вычитает из содержимого счетчика 5 вес этого разряда, равный 0,5 основн го шага приращения. Таким образом, при каждом появлении импульса с вььч да элемента 62 И из содержимого счетчика вычитается значение очередного при ращения, равного 0,75 значения от основного единичного шага. Описанный процесс работы продолжается до vex пор, пока не будет отработано заданное в счетчике 5 число шагов перемещения вдоль наибольшей проекции на координатную ось. Значение содержимого
5
0
5
0
5
0
5
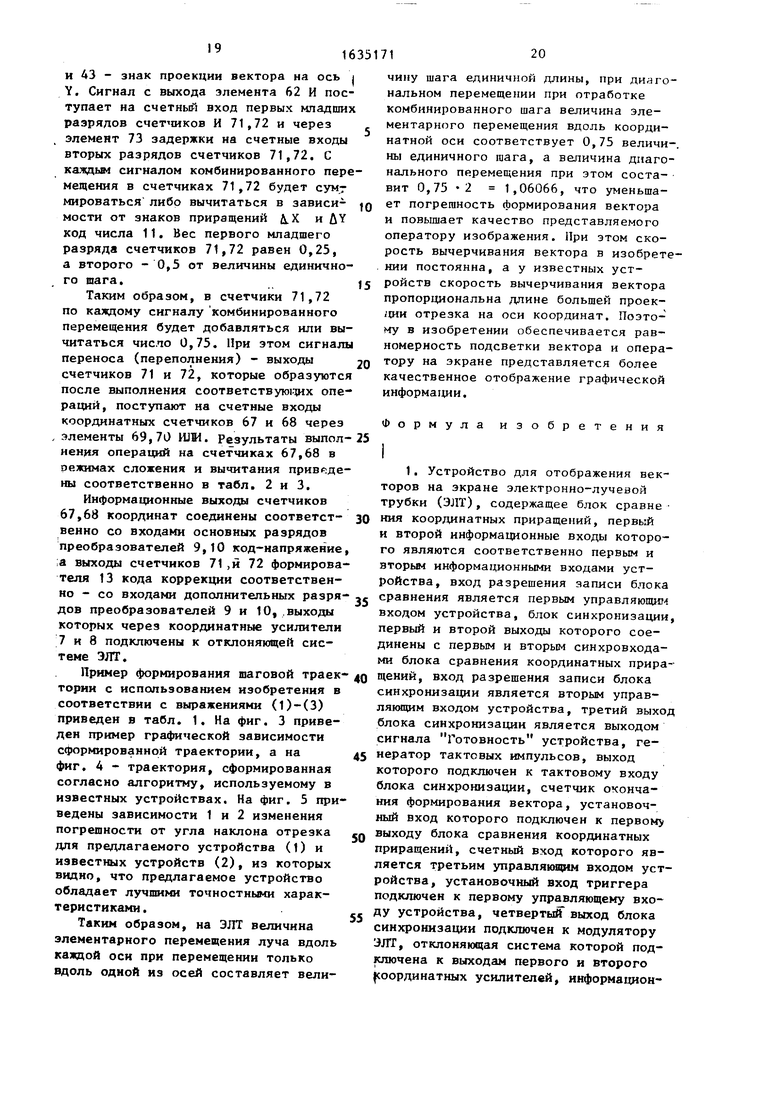
счетчика 5 при этом становится отрицательным, счетчик 5 переполняется и импульс переполнения с выхода старшего разряда счетчика 5 поступает на вход регистра 47 и через элемент 56 ИЛИ на вход регистра 46, а также на входы триггеров 50 и 51 и через элементы 65 задержки на собственные входы и на входы сумматора 45, устанавливая названные элементы в нулевое состояние. При этом сигнал с выхода триггера 51 запрещает формирование разрешения подсчета на выходе элемента 88 запрета блока 3.
Поскольку координатная ось с боль- шеи проекцией отрезка может для разных кадров меняться, поэтому требуется коммутация единичных приращений по соответстпуюздм осям координат. Для это цели используется триггер 50 знака, определяющий знак отношения между проекциями отрезка X и Y на оси координат. Гели в качестве наибольшей проекции отрезка используется проекция отрезка на ось X, триггер 50 знака при вводе исходных данных устанавливается cm налом с выхода 37 блока 2 в единичное состояние и импульсы с выхода элемента 61 И п течение всего кадра отработки вектора проходят через элементы 64 и 70 И, обеспечивая выдачу единичных приращений па счетный вход координатного счетчика 67. Сели же в качестве наибольшей проекции отрезка используется его проекция на ось Y, то триггер 50 знака остается в нулевом состоянии и импульсы с выхода элемента ol И проходят через элементы 63 и 69 И, обеспечивая выдачу единичных приращений па счетный ьход координатного счетчика 68. При этом направления счетчиков 67 и с 8 определяются знаками приращений по осям - выходы 50,41 и 42,43 блока 2. Одновременным перемещением вдоль координатных осей X и Y соответствует появление импульсов на выходе элемента 62 И и входе формирователя 13. Формирователь 13 кода коррекции координат может быть выполнен в виде двух дзухразрядньгх реверсивных счетчиков 71 и 72 и элемента 73 задержки. Входы управления направлением счета первого 71 счетчика соединены с.выходами 40 и 41 блока 2, определяющими знак проекции вектора на ось X, аналогичные входы второго счетчика 72 соединены с выходами 42
и 43 - знак проекции вектора на ось | Y. Сигнал с выхода элемента 62 И поступает на счетный вход первых младших разрядов счетчиков И 71,72 и через элемент 73 задержки на счетные входы вторых разрядов счетчиков 71,72. С каждым сигналом комбинированного перемещения в счетчиках 71,72 будет сумг мироваться либо вычитаться в зависи- мости от знаков приращений Д.Х и UY код числа 11. Вес первого младшего разряда счетчиков 71,72 равен 0,25, а второго - 0,5 от величины единичного шага.
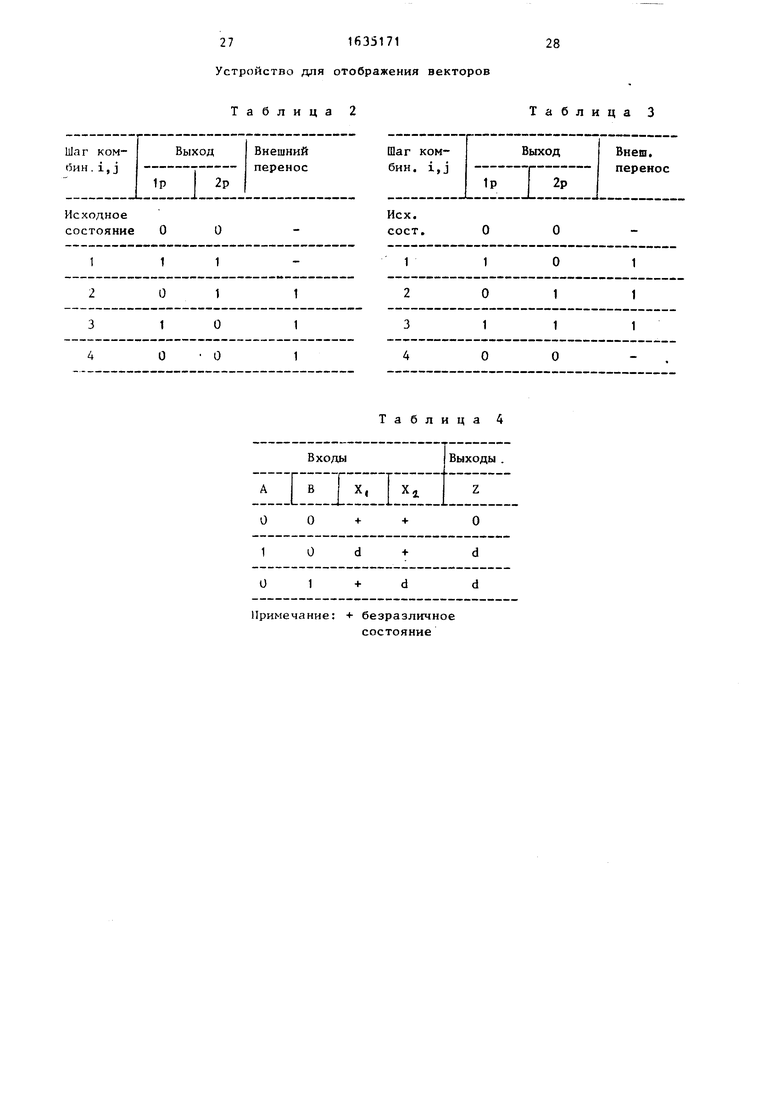
Таким образом, в счетчики 71,72 по каждому сигналу комбинированного перемещения будет добавляться или вычитаться чис10 0,75. При этом сигналы переноса (переполнения) - выходы счетчиков 71 и 72, которые образуются после выполнения соответствующих операций, поступают на счетные входы координатных счетчиков 67 и 68 через элементы 69,70 ИЛИ. Результаты выполнения операций на счетчиках 67,68 в оежимах сложения и вычитания приведены соответственно в табл. 2 и 3.
Информационные выходы счетчиков 67,68 координат соединены соответст- веино со входами основных разрядов преобразователей 9,10 код-напряжение, а выходы счетчиков 71,и 72 формирователя 13 кода коррекции соответственно - со входами дополнительных разря- дов преобразователей 9 и 10, выходы которых через координатные усилители 7 и 8 подключены к отклоняющей системе ЭЛТ.
Пример формирования шаговой траек- тории с использованием изобретения в соответствии с выражениями (1)-(3) приведен в табл. 1. На фиг. 3 приведен пример графической зависимости сформированной траектории, а на фиг. 4 - траектория, сформированная согласно алгоритму, используемому в известных устройствах. На фиг. 5 приведены зависимости 1 и 2 изменения погрешности от угла наклона отрезка для предлагаемого устройства (1) и известных устройств (2), из которых видно, что предлагаемое устройство обладает лучшими точностными характеристиками.
Таким образом, на ЭЛТ величина элементарного перемещения луча вдоль каждой оси при перемещении только вдоль одной из осей составляет вели
чину шага единичной длины, при диагональном перемещении при отработке комбинированного шага величина элементарного перемещения вдоль координатной оси соответствует 0,75 величины единичного шага, а величина диагонального перемещения при этом составит 0,75 2 1,06066, что уменьшает погрешность формирования вектора и повышает качество представляемого оператору изображения. При этом скорость вычерчивания вектора в изобретении постоянна, а у известных устройств скорость вычерчивания вектора пропорциональна длине большей проек- | 1ии отрезка на оси координат. Поэтому в изобретении обеспечивается равномерность подсветки вектора и оператору на экране представляется более качественное отображение графической информации.
Формула изобретения
0 5
0 ,с
д 5 д
5
0
вход которого подключен к шестому выходу формирователя импульсов ориентации единичного вектора, тактирую- 1дий вход которого подключен к выходу генератора тактовых иипучьсоп, второй установочный вход формирователя им- пучьсов ориентации единичного вектора подключен к выходу счетчика окончания формирования вектора, четвертый и пятый управляющие входы которого подключены к пятому и шестому выходам блока синхронизации, с пятого по пятнадцатый выходы которого подключены соответственно к первому - одиннадцатому управляющим входам формирователя импульгоп ориентации единичного вектора, седьмой выход которого подключен к входу блокировки блока синхронизации, второй информационный вход формирователя импульсов ориентации единичного вектора подключен к первому выходу блока сравнения.
отлича5
O
5
0
5
0
5
ющееся тем, что формирователь импульсов ориентации единичного вектора содержит накапливающий сумматор, первый и второй регистры сдвига,первый и второй коммутаторы, первый и второй триггеры, с первого по девятый элементы RiBI, с первого по четвертый элементы И, первый и второй элементы задержки, вход первого элемента задержки является первым установочным входом формирователя, соединенным с установочными входами первого и второго триггера, первого регистра и с первым входом пятого элемента ИЛИ .первый выход первого элемента задержки является пятым выходом блока, второй выход первого элемента задержки подключен к установочному входу накапливающего сумматора, управляющий вход которого подключен к выходу седьмого этемента ИЛИ, первый выход накапливающего сумматора подключен к первому информационному входу первого коммутатора, второй информационный вход которого является вторым информационным входом формирователя, первый управляющий вход первого коммутатора является первым управляющим входом формирователя, соединенным с управляющими входом первого триггера, первым управляющим входом первого регистра и первым информационным входом второго элемента ИЛИ, выход первого коммутатора подключен к информационному входу второго регистра, первый управля
ющни вход которого подключен к первому информационному входу второго коммутатора, второй информационный вход которого подключен к выходу первого регистра, информационный вхсц которо- if м,ч иг рвым информационным входом Лормирзватрлл, лыход второго ком- ттор,. п i-jb 1 г информационному ч п i.vi IN и п гуммятi pa, троти
И К ,. 4L НЬКРЧМ КОТОРОГО ПОДКЛЮЧе
lii I t першп информационным входам первого и второго элементов И, вторые инр щионмы входы когирыч являются ,жт ;к гирующнм (ом формпроватепя, ) ) ьч ;г 0 - рп.пп:ониь1е выходы первого П - О о iieN CiiroB И чолключ ны к и , iji второго ритора, РТО-
i ц . о vo г япг( ,р i р О ЗДиМНМ i mi i i М роН (- , Ч Ч.ЫРЛЯЮЩИП
и ,)oi о p ,, i u 1яется ОДТ1Н- ч ihiTufi управ 14,,/HIM бпока, Ht.Kf1 ; jKJ.PBom jji-.меп t ri НИИ подключен ) т r jitvr нчо-rv мерного коммута- и j ljp riy ,-.ч up iai,полному HVO- ргоро элемента ИЛИ, первый ин- {)маципнный вход первого элемент И И является четвертым управляющим , олом формирователя, соединенным с первыми информационными входами тре-
I. о, гог.ьмого и девятого элементов (1ТП1, второй информационный вход первого элемента ИЛИ является восьмым уп- р.чвпяюпдм входом формирователя, выход третьего элемента ИЛИ подключен к второму управляющему входу второго ре- гтч-тра, второй информационный вход г-ртьсгч ч-шментд ИЛИ является пятым уг-равляю цим входом формирователя, сое -/ченньп- с первым информационным вхо- четвертого элемента ИЛИ, третий i 1 формационн in пход третьего эпемен- та ИЛИ является десятым управляющим входом формирователя, выход четвертого элемента ИЛИ подключен к второму управляющему входу первого регистра, второй вход четвертого элемента ИЛИ является девятым управляющим входом формирователя, соединенным с вторым информационным входом восьмого элемента ИЛИ, выход пятого элемента ИЛИ подключен к установочному входу первого регистра, второй и третий информационные входы пятого элемента ИЛИ являются соответственно третьим и седьмым управляющими входами формировав еггч, выход шестого элемента ИЛИ п .пьтючен к первому информационному входу седьмого элемента ИПИ и первому
15
20
|п
25JQ
Q д
0
5
управляющему входу второго комму. ра, первый и второй информационные входы шестого элемента НИИ явпяются соответственно вторым и шестым управ- пяющими входами формирователя, третий информационный вход шестого элемента ИЛИ подключен к выходу второго элемента И, являющемуся третьим выходом формирователя, соединенным с входом второго элемента задержки, выход которого подключен к второму информационному входу девятого элемента ИЛИ, выход которого является шестым выходом формирователя, третьим управляющим входом которого является первый информационный вход восьмого элемента , выход которого подключен к второму управляющему входу второго коммутатора и к второму информационному входу седьмого элемента ИЛИ, третий информационный вход восьмого элемента ИЛИ подключен к выходу первого элемента И, являющимся четвертым выход м формирователя, соединенным с первыми информационными входами третьего и четвертого элементов И, выходы которых являются соответственно первым и вторым выходами формирователя, вторье информационные входы третьего и четвертого элементов И подключены соответственно к первому и второму выходам первого триггера,
ющим входами формирователя.
А. Устройство по п. отличающееся тем, что формирователь кода коррекции координат содержит первый и второй счетчики и элеТаблица 1
Устройство для отображения векторов
Таблица 2
Примечание: + безразличное состояние
28
Таблица 3
Таблица 4
Ь fc . vj
sx
v.
«H
4-
5j
b
г
s
C i-J Lr
«-R5
Is
-.
-4
л
Ј
////// / / / / / 7
О
ФигА
Щи г.г
О Ю 20 JO W 50 60 70 80 90
Фиг. 5
ос
JJJJ
| Патент ОНА N 4056712, кл | |||
| Способ получения мыла | 1920 |
|
SU364A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
| Устройство для отображения векторов на экране электронно-лучевой трубки | 1985 |
|
SU1304014A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
