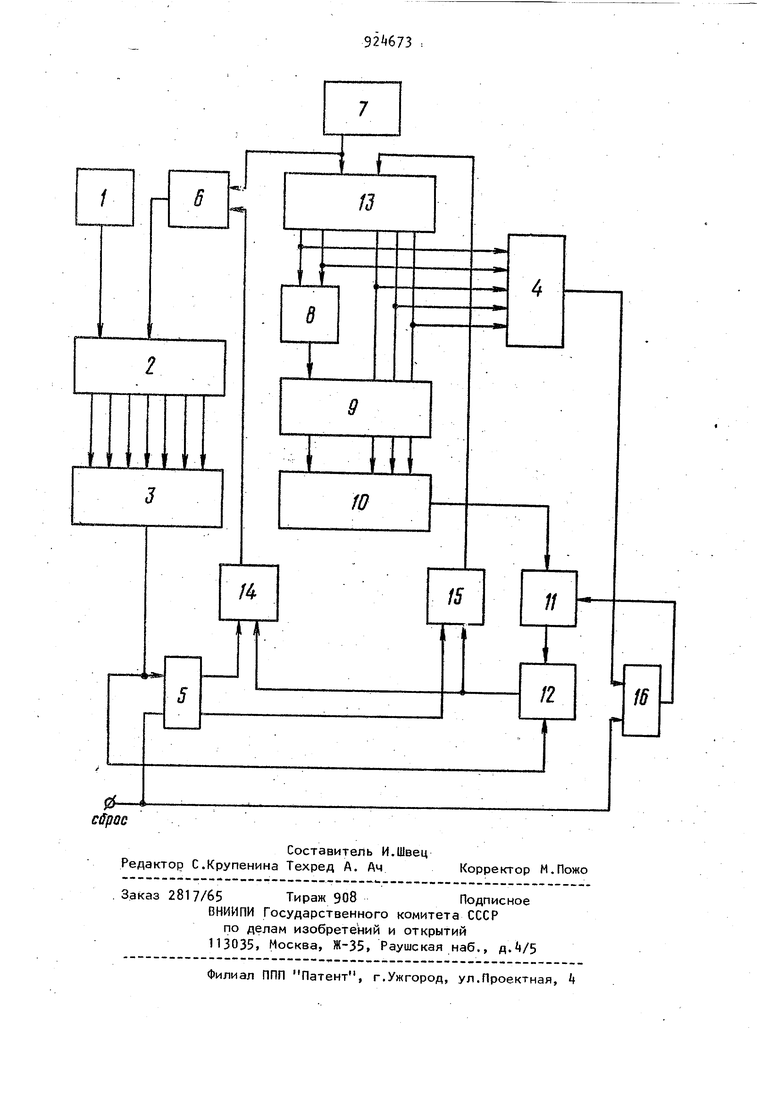
(5) ЦИФРОВАЯ СИСТЕМА ПРОГРАММНОГО Изобретение относится к вычислительной технике, в частности к систе мам программного управленид технологическим оборудованием, и может быть использовано для управления металлорежуии ми и сверлильными станками. Известна цифровая система програм много управления, содержащая входное устройство, блок текущего положения управляемого объекта, релейный блок управления перемещением объекта, сое диненный чере редуктор и датчик обратной связи с блоком текущего положения объекта D Недостатком указанной системы является ее низкая точность, так как релейный блок управления обеспечивает быстрое торможение лишь малоинерционных объектов с малыми скоростями Наиболее близкой к предлагаемой является цифровая система программно го управления, содержащая последовательно соединенные блок задания программы, сумматор, элемент ИЛИ, лог;иУПРАВЛЕНИЯческий блок выделения старшего разря-. да, преобразователь код - напряжение, блок управления приводом и датчик обратной связи 121. Известная система обеспечивает, уменьшение до нулевого значения скорости перемещения объекта при его движении. Недостаток известной системы состоит в том, что уменьшение скорости происходит на протяжении всей длины перемещения, а ;это снижает быстродействие, особенно при больших величинах перемещений. Кроме того, в этой системе на протяжении всей длины переме цений скорость движения объекта изменяется, что ограничивает область ее использования, так как система не может применяться для управления объектами, скорость движения которых должна быть постоянной. Цель изобретения - расширение области применения системы. Указанная цель достигается тем, что в цифровую систему программного управления введены второй сумматор, первый электронный коммутатор, задатчик величины участка замедления и последовательно соединенные первый блок выделения нулевого состояния, Первый триггер, второй электронный коммутатор, третий сумматор, второй блок выделения нулевого состояния и второй триггер, выходом подключенный к второму входу блока управления приводом, вторые входы первого и второго триггеров соединены с шиной Сброс, а второй выход первого триггера соединен с первым входом первого электронного коммутатора, второй вход которого соединен с выхо дом датчика обратной связи, к выходу которого подключен второй вход второго электронного коммутатора, а второй вход датчика обратной связи соединен с выходом первого блока выделения нулевого состояния, выход первого электронного коммутатора соединен с первым входом второго сум матора, выход которого подключен к второму входу первого сумматора, выходами подключенного к входам первого блока выделения нулевого состояния, а второй вход второго сумматора соединен с выходом задатчика величины участка Замедления и с вторым входом третьего- сумматора, выходы младших разрядов которого соединены с вторыми входами логического блока, а выходы старших разрядов подключены к входам элемента ИЛИ.; На чертеже представлена схема циф ровой системы. Система содержит блок 1 задания программы, первый сумматор 2, первый блок 3 выделения нулевого состояния, второй блокk выделения нулевого сос тояния, первый триггер 5, второй сум матор 6, задатчик 7 величины участка замедления, элемент ИЛИ 8, логически блок 9, преобразователь 10 код - напряжение, блок 11 управления приводом, датчик 12 обратной связи, трети сумматор 13, первый электронный коммутатор 1, второй .электронный коммутатор 15 второй триггер 16. Устройство работает следующим образом. Вначале работы импульс, пришедший на шину Сброс, устанавливает триггер 5 в состояние, при котором электронный коммутатор 15 закрывается, а триггер 16 включает блок 11 управ9ления приводом. Блок 1 задания программы выдает в сумматор 2 код, соответствующий величине заданного перемещения, Задатчик 7 величину участка замедления выдает в сумматор 13 и в сумматор 6 код, соответствующий величине участка, на котором должна убывать скорость перемещения. На другой вход сумматора 2 через электронный коммутатор 1 поступает код текущего положения объекта с датчика 12 обратной связи, причем соответ ствующие разряды этого кода суммируются с соответствующими разрядами кода с задатчика 7 величины участка замедления при помощи сумматора 6. Сумматор 2 формирует код разности заданного перемещения и суммарного кода текущего положения объекта и заданного участка замедления. Таким образом, нулевое состояние сумматора 2 будет совпадать с моментом прохождения объектом -немала участка замедления и на выходе блока 3 выделения нулевого состояния формируется импульс, который сбрасывает показания датчика 12 обратной связи в нуль и опрокидывает триггер 5 в противоположное состояние, при котором элек тронный коммутатор l4 закрывается, а электронный коммутатор 15 открывается, пропуская сигналы с датчика 12 обратной связи на второй вход сумматора 13. Сумматор 13 формирует код разности величины участка замедления и показаний датчика 12 обратной связи и младшие разряды кода разности поступают непосредственно в логический блок Э а старшие поступают в него через элемент ИЛИ 8. При этом преобразователь 10 код-напряжение поочередно выдает заданные напряжения, соответствующие весам отдельных разрядов, образующие гистограмму закона торможения.. В тот момент, когда код с датчика 12 обратной связи будет соответствовать коду с задатчика 7 величины участка замедления, показания сумматора 13 будут равны нулю и на выходе блока k выделения нулевого состояния образуется импульс, который поступает на вход установки нуля триггера 16. Триггер 16 опрокидывается и отключает блок 11 управления приводом перемещение объекта заканчивается в заданной точке. Отключение блока управления приводом необходимо для того, чтобы избавиться от ошибки при позиционировании в случае смеще59ния нуля преобразователя код-напряже ние. Цифровая система автоматического управления обладает более высоким быстродействием, чем известная, так как в ней снижение скорости движения объекта происходит не в начале перемещения, а на заданном участке, величина которого выбирается так, чтобы обеспечить нужную точность позици онирования. Формула изобретения .Цифровая система программного управления, содержащая блок задания программы, выходом подключенный к первому сумматору, и последовательно соединенные элемент ИЛИ, логический блок, преобразователь код-напряжение блок управления приводом и датчик обратной связи, отличаю щ а я с я тем, что, с целью расширения области применения, в нее введены второй сумматор, первый электронный коммутатор, задатчик величины участка замедления и последоватепьно соединенные первый блок выделения нулевого состояния, первый триггер, второй электронный коммутатор, третий сумматор, второй блрк выделения нулевого состояния и второй триггер выходом подключенный к второму вхо36ду- блока управления приводом, вторые входы первого и втерого триггеров соединены с шиной Сброс, а второй выход первого триггера соединен с первым входом первого электронного коммутатора,.второй вход которого соединен с выходом датчика обратной связи, к выходу KOtoporo подключен второй вход второго электронного коммутатора, а второй вход датчика обратной связи соединен с выходом первого блока выделения нулевого состояния, выход первого электронного коммутатора соединен с первым входом второго сумматора, выход которого подключен к второмувходу первого сумматора, выходами подключенного к входам первого блока выделения нулевого состояния, а второй вход второго сумматора соединен с выходом задатчика величины участка замедления и с вторым входом третьего сумматора, выходы младших разрядов которого соединены с вторыми входами логического блока, а выходы старших разрядов подключены к входам элемента ИЛИ. t Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 351200, кл, G 05 В 19/18, 19652.Авторское свидетельство СССР № , кл. G 05 В 19/18, 1978 (прототип)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления станком | 1979 |
|
SU930261A1 |
| Устройство для программного управления | 1983 |
|
SU1123022A2 |
| Инфузионный насос | 1985 |
|
SU1279635A1 |
| Двухотсчетный следящий привод | 1989 |
|
SU1700535A1 |
| Система программного управления процессом порционной вакуумной обработки стали | 1989 |
|
SU1684347A2 |
| Устройство для программного управления | 1981 |
|
SU960740A2 |
| Устройство для программногоупРАВлЕНия | 1978 |
|
SU813374A1 |
| Устройство для определения абсолютного положения вала исполнительного механизма | 1988 |
|
SU1781822A1 |
| Устройство для программного управления | 1983 |
|
SU1160367A1 |
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |