Изобретение относится к машиностроению, в частности.к устройствам управления оборудованием для обработки давлением.
Цель изобретения - повышение точности дозирования энергии удара и производительности за счет автоматизации операций управления и обеспечения возможности использования молота совместно с роботом.
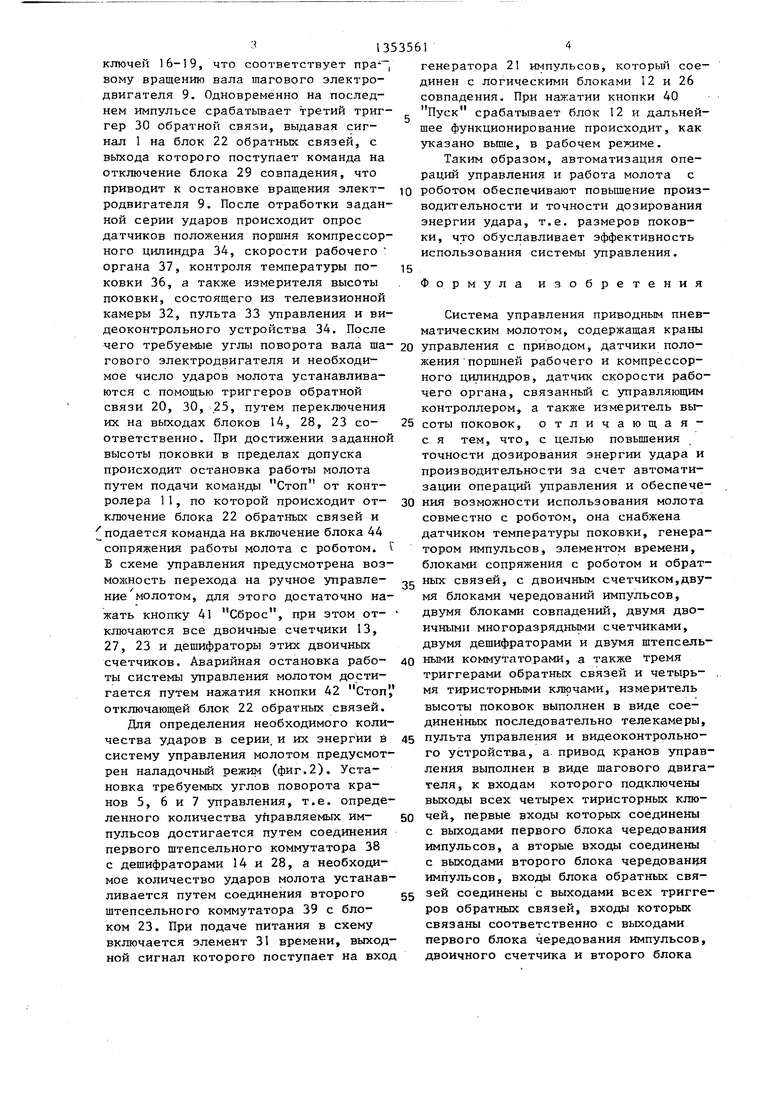
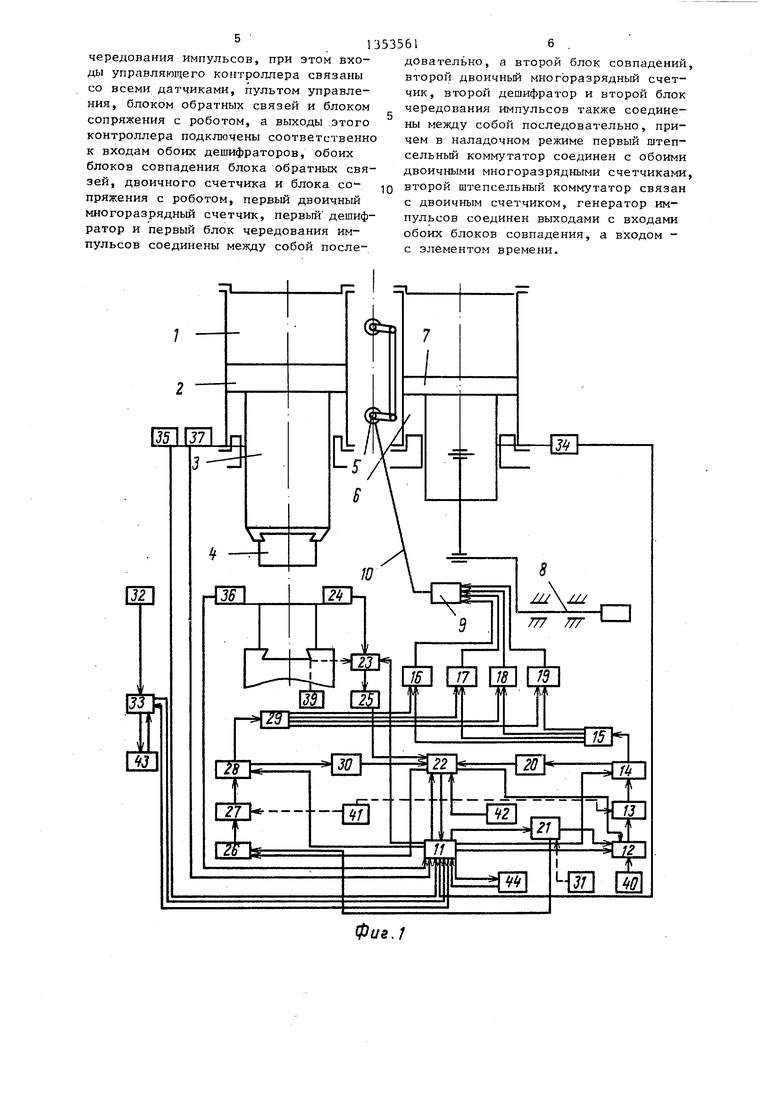
На фиг.. 1 приведена блок-схема системы управления приводным пневматическим молотом в рабочем режиме; на фиг.2 - то же, в наладочном режиме.
Рабочим органом приводного пневматического молота является рабочий цилиндр 1, внутри которого соосно расположен поршень 2, соединенный штоком 3 с рабочим органом 4 (бабой) молота. Штоковая и поршневая полости рабочего цилиндра 1 связаны трубопроводами с расположенными в них поворотными кранами 5 управления, с што- ковой и поршневой полостями компрессорного цилиндра 6, поршень 7 которого кинематически связан с валом шагового электродвигателя 8. Шаговый электродвигатель 9 соединен с помощью карданной передачи 10 с кранами 5 управления.
В систему управления входит прог- раммируемьш контролер .11, первый блок 12 совпадения, первый двоичный
многоразрядньй счетчик L3, первый да- 35 Информация о количестве ударов с кон- шифратор 14, первый блок 15 чередова- тролера 11 поступает на разрешающий
ния импульсов, четыре тиристорных ключа 16-19, первый триггер 20 обратной связи, генератор 21 импульсов, блок 22 обратных св.язей, двоичный счетчик 23, фотореле 24, второй блок 25 обратной связи, второй блок 26 совпадения, двоичньй многоразрядный счетчик 27, второй дешифратор 28, второй блок 29 чередования импульсов третий триггер 30 обратной связи, элемент 31 времени, телекамера 32, пульт 33 управления, датчик 34 положения поршня компрессионного цилиндра, датчик 35 положения поршня рабо- чего цилиндра, датчик 36 температуры поковки, датчик 37 скорости рабочего органа, первый и второй штепсельные коммутаторы 38 и 39, кнопки управления Пуск 40, Сброс 41 и Стоп 42 видеоконтрольное устройство 43 и Робот 44.
Система управления может рабдтать в рабочем и наладочном режимах.
В рабочем режиме контролер 11 включ ает первый блок 12 совпадения и генератор 21 импульсов, импульсы от которого поступают через блок 12 совпадения, на двоичный многоразрядный счетчик 13, где единичный сигнал переносится.из одного разряда в последующий, а на шинах первого дешифратора 14 появляются в виде импульсов единичные сигналы в определенной последовательности. Импульсы с выхода дешифратора I4 подаются на вход первого блока 15 чередования импульсов, который связан с входами тирис- торных ключей 16-19, что вызывает коммутацию фаз шагового электродвигателя 9 дпя левого вращения (со стороны вала). После отработки необходимого количества импульсов для поворота вала электродвигателя 9 на определен- ньй угол краны управления также перемещаются на определенный угол. Одновременно на последнем импульсе с выхода дешифратора 14 единичньш сигнал поступает в первый триггер 20 обратной связи, с выхода которого единичный сигнал поступает на вход блока 22 обратных связей, который определяет
последовательность команд в рабочем цикле управления молотом, с выхода последнего поступает команда на о.т- ключение блока 12, что ведет к остановке шагового электродвигателя 9.
вход двоичного счетчика 23, который фиксирует количество ударов молота с помощью фотореле 24. Молот совершает заданное количество ударов. При последнем ударе срабатывает второй блок 25 обратной связи, выдавая ко- мандгпзш сигнал в блок 22 обратных - связей, с выхода которого единичный сигнал поступает на вход второго блока 26 совпадения, включается тракт реверсирования вращения электродвигателя 9 с коммутацией фаз, с выхода блока 26 импульсы поступают на двоичный многоразрядньй счетчик 27, в котором сигнал переносится из одного разряда в последующий, а на шинах второго дешифратора 28 появляются в виде импульсов единичные сигналы в определенной последовательности.
Импульсы с дешифратора 28 подаются на вход второго блока 29 чередования импульсов, формирующего последовательность включения тиристорных
13535614
ключей 16-19, что соответствует пра, генератора 21 импульсов, которьш соевому вращению вала шагового электро- динен с логическими блоками 12 и 26 двигателя 9. Одновременно на послед- совпадения. При нажатии кнопки 40 нем импульсе срабатывает третий триг- Пуск срабатывает блок 12 и дальней- гер 30 обратной связи, выдавая сиг- шее функционирование происходит, как нал 1 на блок 22 обратных связей, с указано вьппе, в рабочем режиме, выхода которого поступает команда на Таким образом, автоматизация one- отключение блока 29 совпадения, что раций управления и работа молота с приводит к остановке вращения элект- Q роботом обеспечивают повышение произ- родвигателя 9. После отработки задан- водительности и точности дозирования ной серии ударов происходит опрос энергии удара, т.е. размеров поков- датчиков положения поршня компрессор- ки, что обуславливает эффективность ного цилиндра 34, скорости рабочего : использования системы управления, органа 37, контроля температуры по- 15
ковки 36, а также измерителя высоты . Формула изобретения поковки, состоящего из телевизионной
камеры 32, пульта 33 управления и ви- Система управления приводным пнев- деоконтрольного устройства 34. После матическим молотом, содержащая краны чего требуемые углы поворота вала ша- 20 управления с приводом, датчики поло- гового электродвигателя и необходи- жения поршней рабочего и компрессор- мое число ударов молота устанавлива- ного цилиндров, датчик скорости рабо- ются с помощью триггеров обратной чего органа, связанньй с управляющим связи 20, 30, 25, путем переключения контроллером, а также измеритель вы- их на выходах блоков 14, 28, 23 со- 25 соты поковок, отличающая- ответственно. При достршении заданной с я тем, что, с целью повьппения высоты поковки в пределах допуска точности дозирования энергии удара и происходит остановка работы молота производительности за счет автомати- путем подачи команды Стоп от конт- зации операций управления и обеспече- ролера 11, по которой происходит от- ЗО ния возможности использования молота ключение блока 22 обратных связей и совместно с роботом, она снабжена подается команда на включение блока 44 датчиком температуры поковки, генера- сопряжения работы молота с роботом. V тором импульсов, элементом времени, В схеме управления предусмотрена воз- блоками сопряжения с роботом и обрат- можность перехода на ручное управле- с ™ связей, с двоичным счетчиком,дву- ние молотом, для этого достаточно на- мя блоками чередований импульсов, жать кнопку 41 Сброс, при этом от- двумя блоками совпадений, двумя дво- ключаются все двоичные счетчики 13, ичными многоразрядньми счетчиками, 27, 23 и дешифраторы этих двоичных двумя дешифраторами и двумя штепсель- счетчиков. Аварийная остановка рабо- 40 ными коммутаторами, а также тремя ты системы управления молотом дости- триггерами обратных связей и четырь- , гается путем иажатия кнопки 42 Стоп , мя тиристорными ключами, измеритель отключающей блок 22 обратных связей. высоты поковок выполнен в виде сое- Для определения необходимого коли- диненных последовательно телекамеры, чества ударов в серии, и их энергии в 45 пульта управления и видеоконтрольно- систему управления молотом предусмот- го устройства, а привод кранов управ- рен наладочный режим (фиг.2). Уста- ления выполнен в виде шагового двига- новка требуемых углов поворота кра- теля, к входам которого подключены нов 5, 6 и 7 управления, т.е. опреде- выходы всех четырех тиристорных клю- ленного количества управляемых им- 50 чей, первые входы которых соединены пульсов достигается путем соединения с выходами первого блока чередования первого штепсельного коммутатора 38 импульсов, а вторые входы соединены с дешифраторами 14 и 28, а необходи- с выходами второго блока чередования мое количество ударов молота устанав- импульсов, входы блока обратных свя- ливается путем соединения второго gg зей соединены с выходами всех тригге- штепсельного коммутатора 39 с бло- ров обратных связей, входы которых ком 23. При подаче питания в схему связаны соответственно с выходами включается элемент 31 времени, выход- первого блока чередования импульсов, ной сигнал которого поступает на вход двоичного счетчика и второго блока
чередования импульсов, при этом входы управляющего контроллера связаны со всеми датчиками, пультом управления, блоком обратных связей и блоком сопряжения с роботом, а выходы этого контроллера подключены соответственно к входам обоих дешифраторов, обоих блоков совпадения блока обратных связей, двоичного счетчика и блока сопряжения с роботом, первый двоичный многоразрядный счетчик, первый дешифратор и первый блок чередования импульсов соединены между собой после
довательно, а второй блок совпадений, второй двоичньй многоразрядный счетчик, второй дешифратор и второй блок чередования импульсов также соединены между собой последовательно, причем в наладочном режиме первый штепсельный коммутатор соединен с обоими двоичными многоразрядными счетчиками, второй штепсельный коммутатор связан с двоичным счетчиком, генератор импульсов соединен выходами с входами обоих блоков совпадения, а входом - с элементом времени.
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления штамповочным молотом | 1982 |
|
SU1034823A1 |
| Система управления паровоздушным штамповочным молотом | 1985 |
|
SU1310087A1 |
| Устройство для управления ковочным молотом и механизмом ориентации поковки | 1979 |
|
SU863123A1 |
| Система управления молотом | 1982 |
|
SU1060290A1 |
| Устройство для управления тиристорным преобразователем | 1980 |
|
SU921033A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU763936A1 |
| Робот к листоштамповочному прессу | 1983 |
|
SU1098624A1 |
| Бесшаботный горизонтальный молот | 1982 |
|
SU1045988A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1983 |
|
SU1840567A1 |
| Гидравлическое нажимное устройство многовалковой рабочей клети поперечной прокатки | 1975 |
|
SU558742A2 |
Изобретение относится к машиностроению, в частности к устройствам управления оборудованием для обработки давлением. Целью изобретения является повьшение точности дозирования энергии удара и производительности за счёт автоматизации операций управления и обеспечение возможности использования молота совместно с роботом. Цель достигается путем применения управляющего контроллера совместно с датчиками положения поршней рабочего и компрессионного цилиндров, а также датчиков скорости и температуры, блоков обратной связи, сопряжения с роботом, триггеров обратной связи с тиристорными ключами, управляющими реверсивной работой шагового двигателя, который является приводом кранов управления. Кроме того, используется измеритель высоты поковки в виде соединенных последовательно телекамеры, пульта управления и видеоконтрольного устройства. В результате повьшается точность измерения высоты поковок, дозирования энергии удара, а следовательно, и производительность молота. 2 ип. (Л оо сд оо СД 05
Фиг, 2
Составитель В.Грибова Редактор С.Патрушева Техред ц.Ходанич Корр ектор О.Кравцова
Заказ 5656/12Тираж 583Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Авторское свидетельство СССР № 1171171, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
