1
Изобретение относится к машиностроению, в частности к устройствам управления оборудованием для обработ ки давлением.
Целью изобретения является повышение производительности молота путем повышения точности отработки заданной энергии удара.
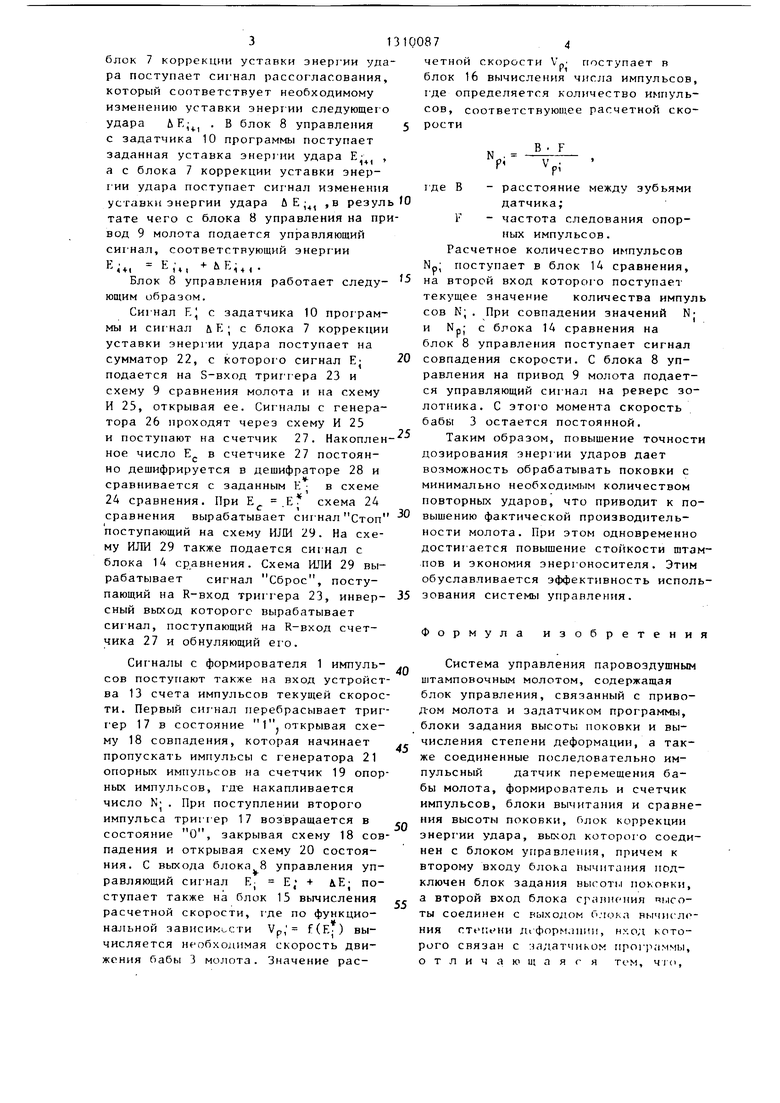
На фиг. 1 приведена функциональная схема системы управления; на фиг. 2 - структурное исполнение устройства счета импульсов текущей скорости; на фиг. 3 - структурное исполнение блока управления системы.
Система управления паровоздушным штамповочным молотом содержит формирователь 1 импульсов, к входу кото- рог о подключен импульсный датчик 2 перемещения бабы 3 молота, а к выходу - соединенные последовательно счетчик 4 импульсов, блок 5 вычитания, блок 6 сравнения высоты поковки, блок 7 коррекции уставки энергии удара, блок 8 управления,привод 9 молота. К второму входу блока 8 управления присоединен задатчик 10 программы, второй выход которого подключен к блоку 11 вычисления степени деформации, выход которого связан с вторым входом блока 6 сравнения высоты поковки, к второму входу блока 5 вычитания присоединен блок 12 задания высоты поковки. К выходу формирователя 1 импульсов подключено также устройство 13 счета импульсов текущей скорости, выход которого соединен с блоком 14 сравнения. К выходу блока 8 управления также подключены последовательно соединенные блок 15 вычисления расчетной скорости и блок 16 вычисления числа импуль сов расчетной скорости, соединенный с вторым входом блока 14 сравнения, выход которог о подключен к блоку 8 управления.
Устройство 13 счета импульсов текущей скорости (фиг. 2) включает в себя триггер 17, вход которого соединен с формирователем 1 импульсов, а также включенные последовательно первую схему 18 совпадения, счетчик
19опорных импульсов, вторую схему
20совпадения, выход которой подсоединен к блоку 14 сравнения, и генератор 21 опорных импульсов, причем прямой выход триггера 17 подключен
к схеме 18 совпадения, а инверсный выход - к схеме 20 совпадения,вто100872
рой вход схемы 18 совпадения связан с выходом генератора 21 опорных импульсов.
Слок 8 управления включает в себя
5 (фиг. 3) сумматор 22, входы которого соединены с задатчиком 10 программы с блоком 7 коррекции уставки энергии удара,выход которого подключен к S-входу триггера 23 и схеме 24 срав нения. Прямой выход триггера 23 подключен к приводу 9 молота и входу схемы И 25, другой вход которой соединен с генератором 26. Выход схемы И 25 подключен к С-входу счетчика 27, R-вход которого подсоединен к инверсному выходу триггера 23.Выход счетчика 27 подключен к депшфратору 28, которого соединен со схемой 24 сравнения. Один вход схемы ШШ
29 подключен к блоку 14 сравнения, а другой - к выходу схемы 24 сравнения . Выход схемы ИЛИ 29 подключен к R-входу триггера 23.
Система управления паровоздушным
35
;штамповочным молотом работает следующим образом.
Перед началом цикла штамповки баба 3 молота находится в верхнем
JQ положении, а все блоки системы приведены в исходное положение. При поступлении сигнала на привод 9 молота баба 3 начинает разгоняться. На формирователь 1 импульсов с импульсного датчика 2 начинают поступать сигналы,причем частота их поступления зависит от скорости бабы. Далее импульсы поступают на счетчик 4 импульсов, где накапливается по h,- , соответствующее высоте поковки после i-ro удара. В блоке 5 вычитания определяется разность между высотой поковки и заданным значением окончательной высоты поковки h,
г поступающей с блока 12 задания высоты поковки. Результат ДЬ; соответствует оставшейся степени деформации. В блоке 11 вычисления степени деформации в соответствии с функциональ,Q ной зависимостью степени деформа1(ии от энергии и номера удара uh,(Ej) по заданной в задатчике 10 программы уставке энергии Е вычисляется ожидаемая степей/) деформации ДЬ,,
55
В блоке 6 сравнения высоты 6 покоя- ки знач«2ние оставшейся степей ; деформации ДЬ| сравнивается ;-. ожидя- емой степенью деформации ЛЬ;. .Если эти параметры не совпадают то в
3
блок 7 коррекции уставки энерг ии удара поступает сигнал рассогласования, который соответствует необходимому изменению уставки энерг ии следующег О удара UKj . В блок 8 управления с задатчика 10 программы поступает заданная уставка энергии удара Е| , а с блока 7 коррекции уставки энер- г ии удара поступает сиг нал изменения уставки энергии удара Л Е ;, ,в резул тате чего с блока 8 управления на првод 9 молота подается управляющий сигнал, соответствующий энерг ии К., ЕМ. ЬЕ,,,.
Блок 8 управления работает следу- ющим образом.
Сигнал EJ с задатчика 10 программы и сиг нал л F ; с блока 7 коррекции уставки энергии удара поступает на сумматор 22, с которого сигнал Е подается на S-вход тригч-ера 23 и схему 9 сравнения молота и на схему И 25, открывая ее. Сигналы с генератора 26 проходят через схему И 25 и поступают на счетчик 27. Накоплен ное число Е в счетчике 27 постоянно дешифрируется в дешифраторе 28 и сравнивается с заданным Е ; в схеме 24 сравнения. При Е .Е схема 24 сравнения вырабатывает сигнал Стоп поступающий на схему ИЛИ 29. На схему ИЛИ 29 также подается сигнал с блока 14 сравнения. Схема ИЛИ 29 вырабатывает сигнал Сброс, поступающий на R-вход триггера 23, инвер- сный выход которого вырабатывает сигнал, поступающий на R-вход счетчика 27 и обнуляющий его.
Сигналы с формирователя 1 импульсов постуггают также на вход устройства 13 счета импульсов текущей скорости. Первый сиг нал перебрасывает триггер 17 в состояние 1 открывая схему 18 совпадения, которая начинает пропускать импульсы с генератора 21 опорных имгтульсов на счетчик 19 опорных импульсов, гд е накапливается число N;. При поступлении второго импульса тригг ер 17 возвращается в состояние о, закрывая схему 18 совпадения и открывая схему 20 состояния. С выхода блока 8 управления уп
равляющий сигнал EJ Е; - АЕ; поступает также на блок 15 вычисления расчетной скорости, г де по функциональной зависикьсти Vp, f(Ej) вычисляется необходимая скорость движения бабы 3 молота. Значение рас
четной скорости V, поступает в блок 16 вычисления числа импульсов, где определяется количество импульсов, соответствующее расчетной скорости
v
в
V,
20
25
5 О -
35
30
1 де В
F
N
-расстояние между зубьями датчика;
-частота следования опорных импульсов.
Расчетное количество импульсов р, поступает в блок 14 сравнения, на второй вход KOTopofo поступает текущее значение количества импуль сов N;. При совпадении значений NJ и Npi с блока 1А сравнения на блок 8 управления поступает сигнал совпадения скорости. С блока 8 управления на привод 9 молота подается управляющий сигнал на реверс золотника. С этог о момента скорость бабы 3 остается постоянной.
Таким образом, повышение точности дозирования энергии ударов дает возможность обрабатывать поковки с минимально необходимым количеством повторных ударов, что приводит к повышению фактической производительности молота. При этом одновременно достигается повышение стойкости штампов и экономия энергоносителя. Этим обуславливается эффективность использования системы управления.
Формула изобретения
Система управления паровоздушным штамповочным молотом, содержащая блок управления, связанный с привод-ом молота и задатчиком программы, блоки задания высоты поковки и вычисления степени деформации, а также соединенные последовательно импульсный датчик перемещения бабы молота, формирователь и счетчик импульсов, блоки вычитания и сравнения высоты поковки, Олок коррекции энергии удара, выход которого соединен с блоком управления, причем к второму входу блока вычитания подключен блок задания высоты поковки, а второй вход блока сраннсния пыго- ты соединен с РЫХОДОМ Олокп вычис-ло- ния степени Д1 формации, нх.од которого связан с нлдатчиком прогр.чммы, отличающаяся тем, 4i(i,
513
с целью повьппения производительности за счет повьппения точности отработки заданной энергии удара, она снабжена устройством счета импульсов текущей скорости, блоком вьгчисле- ния расчетной скорости, блоком вычисления числа импульсов расчетной скорости и блоком сравнения, при этом блок вычисления расчетной скорости, блок вычисления числа импульсов рас876
четной скорости и блок сравнения соединены последовательно выход последнего связан с блоком управления, вход блока вычисления расчетной ско- рости присоединен к выходу блока управления, вход устройства счета импульсов текущей скорости связан с блоком формирования импульсов, а выход - с вторым входом блока сравнения .
Фиг.1
ffue2
фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления молотом | 1983 |
|
SU1082536A1 |
| Система управления молотом | 1986 |
|
SU1391793A1 |
| Система управления штамповочным молотом | 1984 |
|
SU1175632A1 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
| Система управления молотом | 1989 |
|
SU1609548A1 |
| Система управления приводным пневматическим молотом | 1986 |
|
SU1353561A1 |
| Система управления молотом | 1982 |
|
SU1060290A1 |
| Система управления штамповочным молотом | 1982 |
|
SU1034823A1 |
| Система управления штамповочным молотом | 1986 |
|
SU1388173A1 |
| Система управления гидропневматическим молотом | 1987 |
|
SU1532174A1 |

Изобретение относится к области машиностроения, в частности к устройствам управления оборудованием для обработки давлением. Целью изобретения является повышение производительности молота путем повышения точности обработки заданной энергии ударов. Цель достигается за счет сведения числа ударов для обработки поковки к минимально необходимому, поскольку при каждом ударе точно дозируется знергия с учетом вычисления степени деформации на предьщущем ударе. Управляющий сигнал на привод молота подается с блока управления с учетом коррекции чнергии удара. Для этого используется блок коррекции, управляемый сигналами блока сравнения высоты поковки, на входы которого Поступают команды с блока вычисления степени деформации и блока вычитания заданной и фактической высот поковки. Таким образом энергия каждого удара точно дозируется путем непрерывного измерения и вычисления заданных и фактических значений высоты поковки и скорости бабы молота. 3 ил. S (Л 00 
| Система управления молотом | 1983 |
|
SU1082536A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
