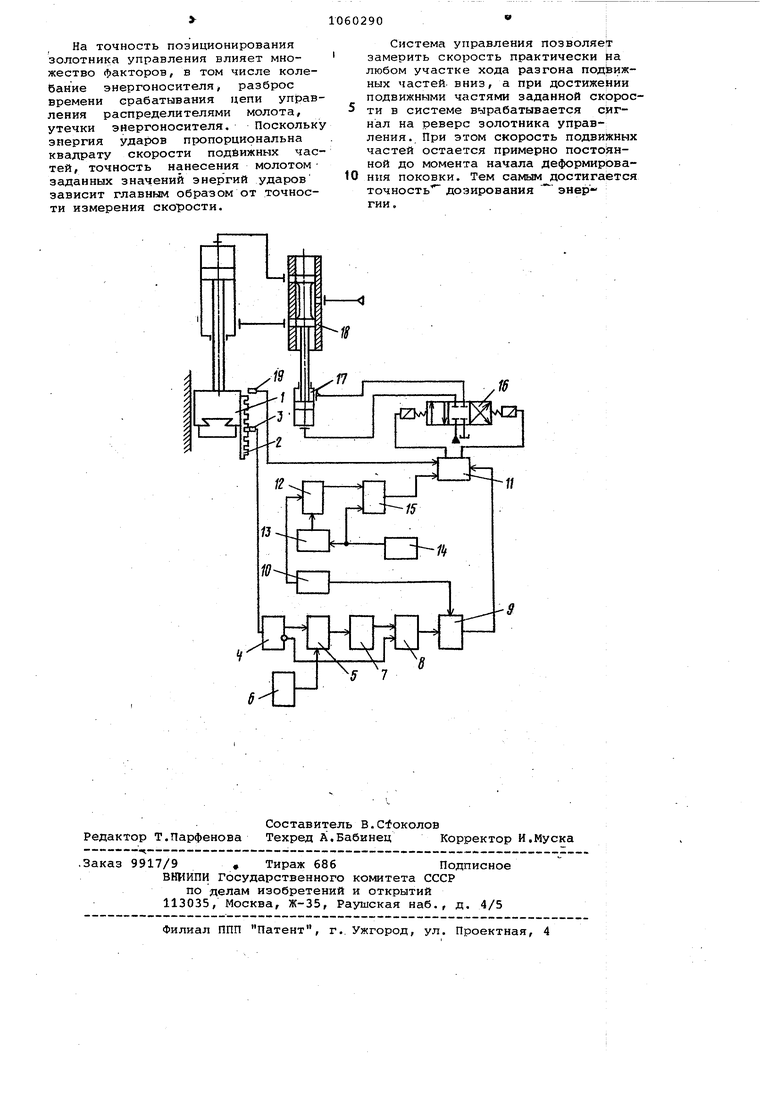
Изобретение относится к маишностроению, в частности к конструкции оборудования для обработки дав лением. Известна система управления молотом, содержащая блок управлени связанный с электрогидравлическим золотником, элементы передачи сигналов и задатчик программы, а таклсе пульт управления и соединенные с блоком управления датчики.текущего и .-крайнего положения бабы молота, причем датчик текущего положения бабы молота выполнен импульсшлм, связан с зубчатой рейкой , закрепленной на бабе молота i . Однако известной системе управления присуща недостаточная точность позициойирования золотника управления, что вызывает, отклонения в энергии ударов по сравнению с заданным значением. В результате возникают перегрузки узлов молота и снижается КПД его рабочего хода. Цель изобретения - повышение КПД и надежности, работы путем увеличения точности дозирования энергии ударов. Поставленная цель достигается тем, что система управления молотом содержащая блок управления, связанный с электрогидравлическим золотником, элементы передачи сигналов и задатчик программы, а также пульт управления и соединенные с блоком (Управления датчики теку1т1егои край,него положения.бабы молота, причем датчик текущего положения бабы молота выполнен импульсным и связан с зубчатой рейкой, закрепленной на бабе молота, снабжена генератором импульсов, триггером, блоком совпадения скорости и блоком совпадения времени с реле времени, а также счетчиком числа опорных импульсов, элементы передачи сигналов выполнены в виде блоков передачи сигналов генератора, счетчика и вре мени, при этом триггер, блок переда чи сигналов генератора, счетчик чис ла опорных импульсов, блок передачи сигналов счетчика и блок совпадения скорости соединены последовательно, выход последнего подключе к входу блока управления:, другой вх блока управления соединен с выходом блока передачи сигналов времени, 1соединенного свЪими входами с пульто управления, реле времени и блоком, совпадений времени, вход последнего связан с задатчиком программы, соединенным также с блоком совпадения скорости, а генератор импульсов под ключен к блоку передачи сигналов генератора, триггер соединен также с выходом датчика текущего положения бабы мол9та и входом блока передачи сигналов счетчика. На чертб5же приведена конструктивная блок-схема системы управления молотом. Система управления молотом состоит из установленной на бабе 1зубчатой рейки 2, связанной с бесконтактным датчиком 3 текущего положения бабы. Датчик 3 связан со счет™ ным входом триггера 4, Прямой выход триггера 4 связан со входом блока 5 Передачи сигналов генератора . Другой вход блока 5 передачи сигналов генератора связан с генератором 6 опорных импульсов,а выход - со счетчиком 7 числа опорных импульсов. Выход счетчика 7 опорных импульсов связан с входом блока 8 передачи сигналов счетчика, другой выход которого св:язан с инверсным выходом триггера 4, Выход блока .передачи сигналов сче.тчика 8 связан с входом блока 9 совпадения скорости, другой вход которого связан .с выходом задатчика программы 10. Выход блока 9 совпадения связан с блоком 11 управления. Задатчик программы 10, в сврю очередь, связан с входом блока 12 совпадения времени, другой вход которого связан с выходом электронного р.еле времени 13. Вход реле времени 13 связан с пультом управления 14. Пульт урравления 14, в свою очередь, связан с управляющим входом блока 15 передачи сигналов времени, при этом запрещающий вход блока 15 передачи сигналов времени связан с выходом блока. 12 совпадения времени. Выход блока 15 передачи сигналов времени связан с входом блока 11 управления. Выходы -блока управления связаны, соответственно, с электромагнитами Э и Bg электрогидравлического золотника 16. Электрогидравлический золотник 16 связывает управляемые полости гидравлического цилиндра 17 с источником жидкости высокого давления и слинным баком. Поргаень управляющего цилиндра 17 соосно соединен штоком с парораспределительным-золотником 18. Система снабжена также бесконтактным датчиком 19 крайнего верхнего положения, связанным с входом блока 11 управления. . Система управления работает следун щим образом. В исходном положении баба молота с рейкой 2 находятся в крайнем верхнем положении. При поступлении раз- решающего сигнала на вниз с пульта управления 14 блок 15 передачи сигналов времени (при отсутст- . ВИИ сй:гнала с блока 12 совпадения времени) открывается, и управляющий сигнал поступает в блок 11, управления , который вырабатывает упразляющий сигнал, поступающий на электромагнит Э. электрогидравлического золотника 16. При срабатывании элек тромагнита Э электрогидравлической эолотник 16 соединяет источник жидкости высокого давления с поршневой по.лостью цилиндра управления золотником. Золотник 18, перемещаясь вверх, соединяет источник энергоносителя с пориневой полостью рабочего цилиндра -молота. Баба молота начинает разгоняться вниз. При этом одновременно с движением подвижннх частей включается электронное реле времени 13, которое начинает отсчитывать время подъема золотника 18. Сигнал с реле времени 13 начинает поступать в блок 12 совпадения времени, на другой вход которого поступает сигнал с эадатчика 10 программы. Как только эти сигналы совпадут блок совпадения времени вырабатывает запирающий сигнал, который закрывает блок 15 передачи сигналов времени. Сигнал на входе блока- 11 управления пропадает, электромагнит Э. .обесточивается, и электрогидравлический золотник 16 устанавливаетс в нейтральномположении. При этом подъем золотника 18 прекращается и подвижные части начинают разгонятьс вних. При разгоне подвижных частей рейка 2 взаимодействует с бесконтак ным датчиком 3. Импульсы с датчика 3поступают на счетный вход триггера 4. На прямом выходе триггера 4устанавливается состояние 1, на инверсном состоянии О. Сигнал 1 с прямого выхода триггера 4 открывает блок 5 передачи сигналов генератора и импульсы, частота следования которых постоянная, с генератора 6 опорных импульсов через блок :5 передачи сигналов генератора пост пают на вход счетчика 7 числа опорных импульсов. При поступлении второго импульса с датчика 3 триггер 4 перебрасывается и на его прямом выходе устанавливается состояние О, на инверсном - состояние 1. Сигнал с прямого выхода триггера 4 закрывает блок 5 передачи сигналов генератора, подсчет опорных импульсов счетчиком 7 прекращается. Время счетчика Т равно Т -§- V где-V - скорость движения подвижных частот . В - база, расстояние между осями зубьев зубчатой рейки. Число импульсов, подсчитанное счетчиком числа опорных импульсов равно N Т .р , где Т - время работы счетчика числа опорных импульсов; Р - частота следования опорных импульсов. Число импульсов, подсчитанных счетчиком числа опорных импульсов, обратно пропоротбнально скорости движения подвижных частей N 5--I- . Сигнал в двоичном коде, соответствующий числу импульсов с выхода счетчика 7 числа опорных импульсов , поступает на вход блока 9 совпадения скорости. На другой вход блока 9 совпадения скорости поступает сигнал в двоичном коде с задатчика 10 программы, соответствующий заданной скорости движения подвижных частей молота. Как только импульсы, поступающие вJблoк 9 совпадения скорости совпадут на выходе блока 9 вырабатывается сигнал, который поступает в блок il управления. Блок 11 управления вырабатывает сигнал, который поступает в электромагнит Э. Электро- , магнит Э2, срабатывая, соединяет SUTOKOБУЮ I полость гидравлического цилиндра 17 с источником жидкости высокого давления, а поршневую полость - со сливом. При этом происходит реверс парораспределительного золотника 18, подвижные части продолжают движение вниз до соприкосновения с поковкой. После нанесения удара подвижные части начинают сразу разгоняться вверх. При достижении подвижных частей отметки, соответствующей расположению бесконтактного датчика 19 крайнего верхнего положения с последнего поступает сигнал на : вход блока 11 управления. С выходов блока 11 управления поступают управляющие сигналы k электромаг:Нйтам Э и Э соответственно. При этом электромагнит Э срабатывает, а электромагнит Э обесточивается. Парораспределительный золотник 18 поднимается и происходит останов подвижных частей в крайнем верхнем положении. После останова подвижные части разгоняются вниз, и цикл повторяется. Наличие генератора импульсов, бесконтактного датчика импульсов Зсщатчика программы, блоков перёдачи сигналов генератора, передачи сигналов счетчика,передачи сигналов времени, совпадения, счетчика числа опорных импульсов хода разгона бабы вниз позволяет повырить точность отработки молотом заданных значений энергий ударов.
На точность позиционирования золотника управления влияет множество факторов, в том числе колебание энергоносителя разброс времени срабатывания цепи уп)равления распределителями молота, утечки энергоносителя. Поскольку энергия ударов пропорциональна квадрату скорости подбижных частей, точность нанесения молотом эаданных значений энергий ударов зависит главным образом от точности измерения скорости.
Система управления позволяет замерить скорость практически на любом участке хода разгона подЬижных частей вниз, а при достижении подвижными частями заданной скорости в системе вырабатывается сигнал на реверс золотника управления. При этом скорость подвижных частей остается примерно постоянной до момента начала деформирования поковки. Тем самым достигается точность дозирования энер гии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления штамповочным молотом | 1982 |
|
SU1034823A1 |
| Система управления паровоздушным штамповочным молотом | 1985 |
|
SU1310087A1 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
| Система управления штамповочным молотом | 1986 |
|
SU1388173A1 |
| Система управления приводным пневматическим молотом | 1986 |
|
SU1353561A1 |
| Система управления молотом | 1980 |
|
SU948515A1 |
| Система управления молотом | 1989 |
|
SU1609548A1 |
| Система программного управления процессом порционной вакуумной обработки стали | 1989 |
|
SU1684347A2 |
| Система управления молотом | 1983 |
|
SU1082536A1 |
| Устройство дистанционного управления паровоздушным молотом | 1983 |
|
SU1072970A1 |
СИСТЕМА УПРАВЛЕНИЯ МОЛОТОМ, содержащая блок управления, связанный с электрогидравлическим золотником, элементы передачи сигналов и задатчик программы, а также пульт управления и соединеннне с блоком управления датчики текущего и крайнего положения бабы молота, причем датчик текзтцего положения . бабы молота выполнен импульсным и связан с зубчатой рейкой, закрепленной на бабе молота, о тли чающаяся тем, что, с целью повышения КПД и надежности работы путем увеличения точности дозирова- ния энергии ударов, она снабжена генератором ш-шульсов, триггером, блоком совпадения скорости и блоком совпадения времени с реле времени, а также счетчиком числа опорных импульсов, элементы передачи сигналов выполнены в виде блоков передачи сигналов генератора, счетчика и времени, при этом триггер, блок передачи сигналов генератора, счетчик числа опорных импульсов, блок передачи сигналов счетчика и блок совпадения скорости соединены последовательно, выход последнего подключен к входу блока управления, другой вход блока управления соединен с выходом блока передачи сигналов времени, соединенного своими входами с пультом управления, реле времени и блоком совпадения i времени, вход последнего связан с задатчиком программы, соединенным также с блоком совпадения скорости, а генератор импульсов подключен к блоку передачи сигналов генератора, триггер соединен также с выходом датчика текущего гтоложения бабы молота и входом блока передачи.сигналов счетчика. О ivV
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3432305/25-27, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
