Изобретение относится к железнодорожному транспорту, в частности к устройствам автоматизации процесса обучения операторов.
Цель изобретения - расширение функциональных возможностей.
На фиг.1 схематично показан тренажер для обучения операторов подвижного состава, общий вид{ на фиг.2 - структурная схема блокга управления тренажером; на фиг.З - тренировочная площадка, вид сверху, на фиг.4 - дорожка, разрезi на фиг,5 - рельс
20
с размещенными на нем датчиками, раз- 15 размещены внутри дорожки 31, идущей
вокруг вращающегося стенда. Дорожка. 31 выполнена из упругого изолирующего материала 32 (фиг.З и 4), а датчики 18 представляют собой концентрические токопроводящиа кольца 33, разбитые на одинаковое число секто-- ров 34, причем секторы 34 и кольца 33 отделены друг от друга изолирующим материалом 32; и токопроводящее
25 кольцо 35 шириной, равной ширине дорожки 31, расположенное в вертикальной плоскости ниже токопроводя- щих колец 33 и отделенное от них воздушным промежутком 36, при этом
2Q каждый сектор 34, замыкаемый при
воздействии веса человека, представляет собой один датчик, а вся совокупность секторов 34 одного кольца 33 образует структурно автономную группу датчиков 18.
рез.
Тренажер содержит расположенные на вращ ающемся стенде рабочие места 1, каждое из которых снабжено поручнем 2, юдножкой 3, рычагом 4 привода автосцепки, закрепленным на балке 5,и световым табло 6, а также имитатором соударения вагонов (на фиг.1 не показан), шпренгельно-стержневую систему 7, кинематически связывающую рабочие места 1 с имитаторами соударения вагонов и неисправностей поручня и подножки, рельс 8 и макеты вагонных колес. 9, .выполненные в натуральную величину из упругого материала, например резины, и укрепленные на шпренгельно-стержневой системе с помощью пружинной подвески. Входы блока 10 управления процессом обучения подключены к выходам командо- аппарата 11, датчиков 12 состояния поручней, подножек и рычагов приводов автосцепок и коммутатора 13, а выходы - к входам блока 14 регулирования скорости вращения стенда, имитаторов 15 соударений вагонов и неисправностей поручней и подножек и блока 16 управления световыми табло, причем входы коммутатора 13 соединены с выходами датчиков 17 положения колес и тормозных башмаков и датчиков 18 местонахождения обучаемых. Блок 10 управления процессом обучения представляет собой микроЭВМ в составе блока 19 центрального процессора и подключенных к одним из входов интерфейса 20 микроЭВМ, печатающего устройства 21, блоков оперативной 22 и внешйей 23 памяти, таймера 24, двух портов ввода 25 и 26 и вывода 27 и 28 сигналов управления, причем к порту 26 подключен вход шифратора 29, а к порту 28 - вход блока 30 усилителей сигналов.
40
35
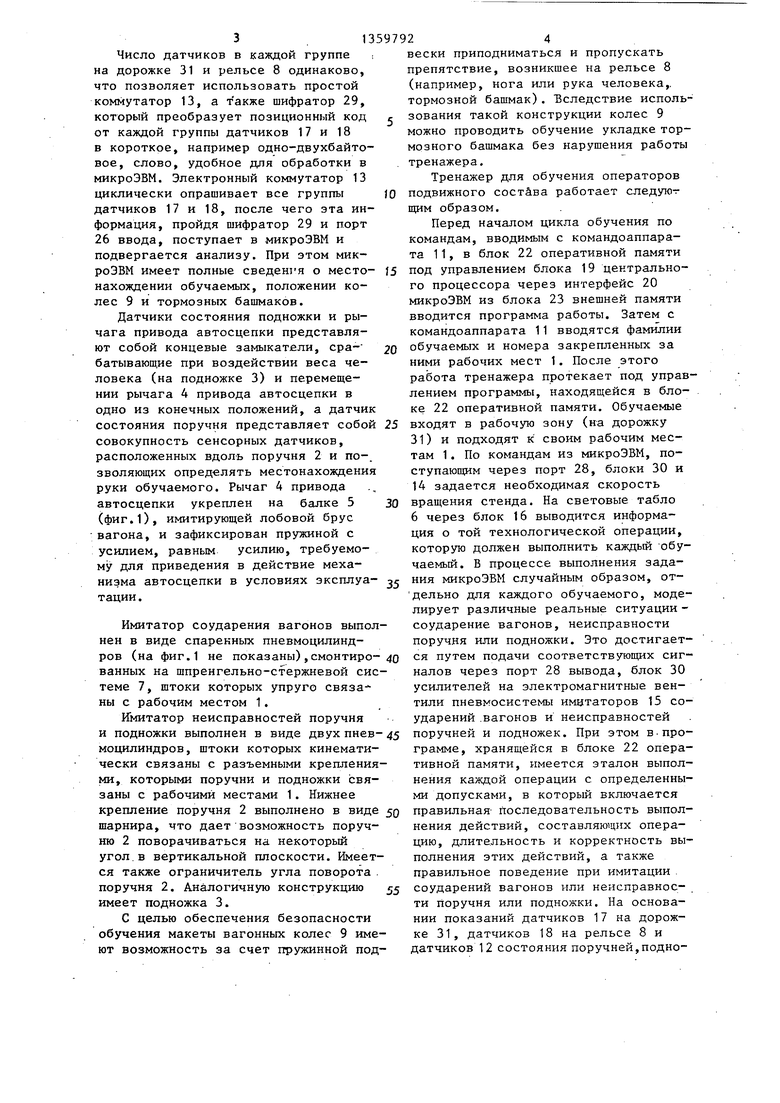
Для анализа корректности . выполнения операции укладывания тормозного башмака необходимо знание положения колеса 9, перед которым укладывается башмак, и позиции самого башмака. Для этого в тренажере использованы две группы датчиков 17 на рельсе 8, Датчики 17 представляют собой расположенные с двух сторон рельса 8 на уровне перехода головки рельса в шейку установленные на пружины 37 стальные полосы 38 (фиг.5), идущие по периметру рельса 8, под которыми находятся укрепленные на равном расстоянии по периметру рельса 8 на опорных планках 39 микропереключатели 40. Микропереключатели 40, расположенные с одной стороны рельса, замыкаются ребордами колес 9, а при укладке тормозного башмака бортиком его подошвы замыкаются микропереключатели, расположенные сдру- стороны рельса 8.
50
55
Другой вход интерфейса 20, к которому подключен командоаппарат 11, входы шифратора 29 и порта 25 ввода сигналов управления являются входами блока 10, а выходы блока 30 усилителей сигналов и порта 27 вывода сигналов управления - выходами блока 10.
Для анализа местонахождения обучаемого в процессе выполнения технологической операции (например, укладка тормозного башмака, спрыгива- ние с подножки 3 и др.) датчики 18
воздействии веса человека, представляет собой один датчик, а вся совокупность секторов 34 одного кольца 33 образует структурно автономную группу датчиков 18.
0
5
Для анализа корректности . выполнения операции укладывания тормозного башмака необходимо знание положения колеса 9, перед которым укладывается башмак, и позиции самого башмака. Для этого в тренажере использованы две группы датчиков 17 на рельсе 8, Датчики 17 представляют собой расположенные с двух сторон рельса 8 на уровне перехода головки рельса в шейку установленные на пружины 37 стальные полосы 38 (фиг.5), идущие по периметру рельса 8, под которыми находятся укрепленные на равном расстоянии по периметру рельса 8 на опорных планках 39 микропереключатели 40. Микропереключатели 40, расположенные с одной стороны рельса, замыкаются ребордами колес 9, а при укладке тормозного башмака бортиком его подошвы замыкаются микропереключатели, расположенные сдру- стороны рельса 8.
0
5
Число датчиков в каждой группе , на дорожке 31 и рельсе 8 одинаково, что позволяет использовать простой коммутатор 13, а т акже шифратор 29, который преобразует позиционный код от каждой группы датчиков 17 и 18 в короткое, например одно-двухбайтовое, слово, удобное для обработки в микроэвм. Электронный коммутатор 13 циклически опрашивает все группы датчиков 17 и 18, после чего эта информация, пройдя шифратор 29 и порт 26 ввода, поступает в микроЭВМ и подвергается анализу. При этом мик- роЭВМ имеет полные сведеш-я о место- нахождении обучаемых, положении колес 9 и тормозных башмаков.
Датчики состояния подножки и рычага привода автосцепки представляют собой концевые замыкатели, ера- батывающие при воздействии веса человека (на подножке 3) и перемещении рычага 4 привода автосцепки в одно из конечных положений, а датчик состояния поручня представляет собой совокупность сенсорных датчиков, расположенных вдоль поручня 2 и по-. зволяющих определять местонахождения руки обучаемого. Рычаг 4 привода автосцепки укреплен на балке 5 (фиг.1), имитирующей лобовой брус вагона, и зафиксирован пружиной с усилием, равным усилию, требуемому для приведения в действие механизма автосцепки в условиях зксплуа- тации.
Имитатор соударения вагонов выполнен в виде спаренных пневмоцилинд- ров (на фиг.1 не показаны),смонтиро- ванных на шпренгельно-стержневой системе 7, штоки которых упруго связа- ны с рабочим местом 1.
Имитатор неисправностей поручня и подножки выполнен в виде двухпневмоцилиндров, штоки которых кинематически связаны с разъемными креплениями, которыми поручни и подножки связаны с рабочими местами 1. Нижнее крепление поручня 2 выполнено в виде шарнира, что дает возможность поручню 2 поворачиваться на некоторый угол.в вертикальной плоскости. Имеется также ограничитель угла поворота . поручня 2. Аналогичную конструкцию имеет подножка 3.
С целью обеспечения безопасности обучения макеты вагонных колес 9 имеют возможность за счет пружинной подвески приподниматься и пропускать препятствие, возникшее на рельсе 8 (например, нога или рука человека,, тормозной башмак). Вследствие использования такой конструкции колес 9 можно проводить обучение укладке тормозного башмака без нарушения работы тренажера.
Тренажер для обучения операторов подвижного сост&ва работает следующим образом.
Перед началом цикла обучения по командам, вводимым с командоаппара- та 11, в блок 22 оперативной памяти под управлением блока 19 центрального процессора через интерфейс 20 микроэвм из блока 23 внешней памяти вводится программа работы. Затем с командоаппарата 11 вводятся фамилии обучаемых и номера закрепленных за ними рабочих мест 1. После этого работа тренажера протекает под управлением программы, находящейся в блоке 22 оперативной памяти. Обучаемые входят в рабочую зону (на дорожку 31) и подходят к своим рабочим местам 1. По командам из микроЭВМ, по- ступаюощ м через порт 28, блоки 30 и 14 задается необходимая скорость вращения стенда. На световые табло 6 через блок 16 выводится информация о той технологической операции, которую должен выполнить каждый обучаемый. В процессе выполнения задания микроэвм случайным образом, от- дельно для каждого обучаемого, моделирует различные реальные ситуации - соударение вагонов, неисправности поручня или подножки. Это достигается путем подачи соответствующих сигналов через порт 28 вывода, блок 30 усилителей на электромагнитные вентили пневмосистемы имитаторов 15 соударений .вагонов и неисправностей поручней и подножек. При этом в-программе, хранящейся в блоке 22 оперативной памяти, имеется эталон выполнения каждой операции с определенными допусками, в который включается правильная- последовательность выполнения действий, составляю1цих операцию, длительность и корректность выполнения этих действий, а также правильное поведение при имитации . соударений вагонов или неисправности поручня или подножки. На основании показаний датчиков 17 на дорожке 31, датчиков 18 на рельсе 8 и датчиков 12 состояния поручней,подножек и рычагов привода автосцепки, а также таймера 24 микроЭВМ анализирует выполнение каждым обучаемым заданной технологической операции. По каждой операции формируется оценка, складывающаяся из суммы элементарных оценок с определенными весо- выми коэффициентами, выставленных за выполнение действий, составляющих технологическую операцию. В конце цикла обучения определяется комплексная оценка по сумме оценок за выполнение технологических операций, при этом каждая оценка за технологическую операцию имеет свой весовой коэффициент.
Тренажер позволяет проводить обучение практически всем технологическим операциям,, которые реально выполняют работники железнодорожных станций: проезд на подножке, расцепление автосцепки, укладкатормозного башмака, подача сигнала машинис- ту (при этом составитель одной рукой держится за йоручень, стоя на подножке, а в другой руке держит флажок) и т.п.
Комплексная оценка аттестует каждого обучаемого и определяет его готовность или неготовность к самостоятельной работе. Комплексная оценка В1ыводится как на световые табло 6, так и на печатающее устройство 21. В случае неудовлетворительной оценки блок 19 центрального процессора сохраняет в блоке 23 внешней памяти (например, кассетном накопителе на магнитной ленте) протокол выполнения программы обучения конкретным обучаемым. В следующем цикле обучения при вводе с командоаппа- рата 11 фамилий обучаемых и номеров закрепленных за ними рабочих мест для повторно обучаемых формируется набор технологических операций с преобладанием тех операций, которые вызывали затруднения у обучаемого при предьщущем. цикле.
Таким образом, предлагаемый тренажер позволяет повысить качество обучения операторов-железнодорожников, а также сделать оценку выполнения требуемых действий более объективной. Формула изобретения
1. Тренажер для обучения операторов подвижного состава, содержащий рабочие места, каждое из которых
0
5
0
5
0
5
0
5
0
5
состоит из смонтированных на вращающемся стенде поручня, подножки и рычага привода автосцепки, имитатор соударения вагонов, с которым через шпренгельно-стержневую систему связаны рабочие места, и fитaтopы неисправностей поручней и подножек, блок регулирования скорости вращения стенда и командоаппарат, отличающийся тем, что, с целью расширения функциональных возможностей, он снабжен уложенным по окружности вращения стенда рельсом, укрепленными на на шпренгельно-стержневой системе с помощью пружинной подвески макетами колес, датчиками состояния поручней, подножек и рычагов приво- дов автосцепок, расположенными на дорожке вокруг стенда и на рельсе и связанными с коммутатором группами датчиков соответственно местонахождения обучаемых и положения колес и тормозных башмаков, размещенными на каждом рабочем месте световыми табло, блоком управления световыми табло и блоком управления процессом обучения операторов, входы которого подключены к выходам командоаппара- та, датчиков состояния поручней, подножек и рычагов приводов автосцепок и коммутатора, а выходы - к входам блока регулирования скорости вращения стенда, имитаторов соударения вагонов и неисправностей поручней и подножек и блока управления световыми табло.
2.Тренажер по п.1, о т л и ч а- ю щ и и с я тем, что датчики положения колес и тормозных башмаков выполнены в виде расположенных по периметру рельса с двух его сторон на уровне перехода головки рельса в щейку подпружиненных стальных полос, под которыми установлены на равном расстоянии по периметру рельса на опорных планках микропереключатели,
3.Тренажер по п.1, отличающийся тем, что датчики мес- п тонахождения обучаемых выполнены в . виде размещенных под упругим изолирующим покрытием дорожки, идущей вокруг стенда, концентрических токо- проводящих колец и отделенного воздушным промежутком и расположенного под ними токопроводящего кольца шириной, равной ширине дорожки, причем концентрические, токопроводящие коль713597928
ца отделены друг от друга изолирую- ковое число секторов с помощью изоля- щим материалом и разделены на одина- ционных вставок.
gju&.l
срие.э
jV 3S yff фиеЛ
39
Редактор М.Петрова
Составитель Л.Резникова Техред М.Х6данич
Заказ 6155/50
Тираж 433
ВНИШШ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
фие.5
Корректор Л.Пилипенко
Подписное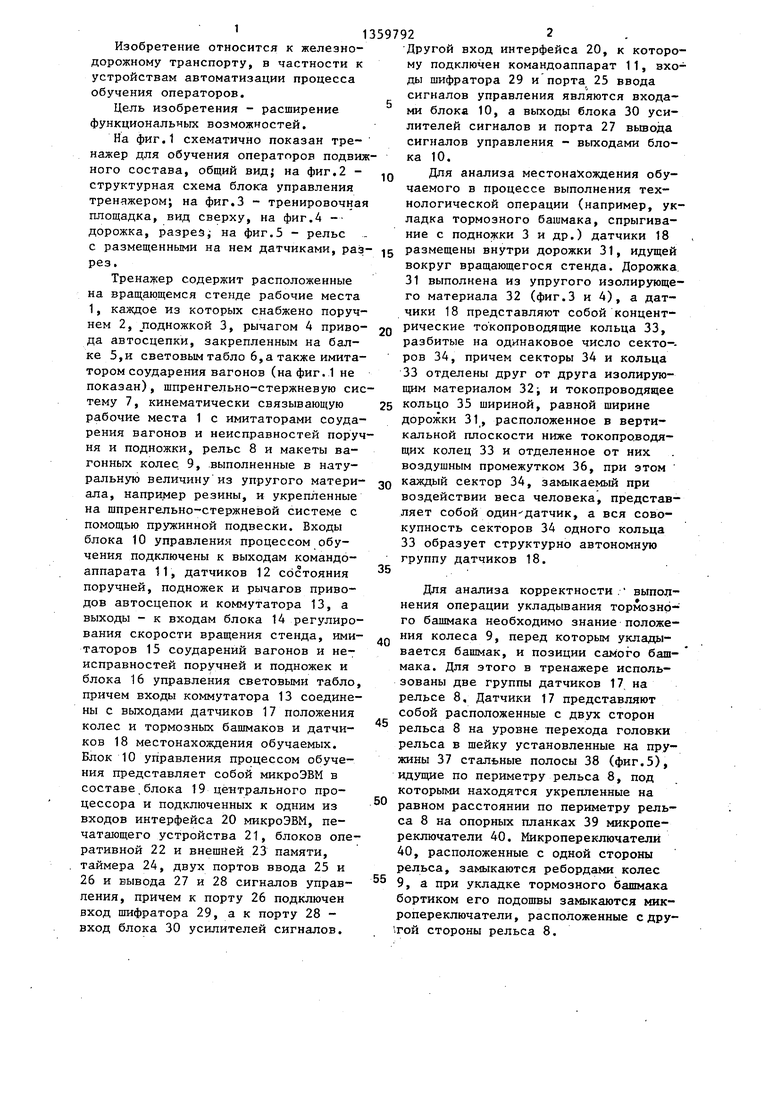
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер оператора железнодорожного транспортного средства | 1983 |
|
SU1234867A1 |
| Способ обучения приемам управления четырехколесным внедорожным мототранспортным средством (квадроциклом) и тренажер для его реализации | 2024 |
|
RU2830015C1 |
| Тренажерный комплекс для изучения устройства, работы тормозного оборудования и управления тормозами | 2018 |
|
RU2686349C1 |
| ИНТЕРАКТИВНАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБУЧЕНИЯ ПО ПРОФЕССИЯМ ОПЕРАТОРОВ СОРТИРОВОЧНОЙ ГОРКИ | 2021 |
|
RU2748768C1 |
| ТРЕНАЖЕР МЕХАНИКА-ВОДИТЕЛЯ | 2023 |
|
RU2828735C1 |
| Стенд для динамических и обкаточных испытаний колесно-моторных блоков локомотивов | 1982 |
|
SU1133491A1 |
| Катковый стенд для оценки динамических параметров тележки вагона | 2017 |
|
RU2668485C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ТОЧКИ ПОПАДАНИЯ ПРИ ОБУЧЕНИИ СТРЕЛЬБЕ | 1983 |
|
SU1376706A1 |
| Тренажер для обучения электросварке | 1979 |
|
SU862172A1 |
| СТРЕЛКОВЫЙ ТРЕНАЖЕР | 1991 |
|
RU2038568C1 |

Изобретение относится к железнодорожному транспорту, в частности к устройствам автоматизации процесса обучения операторов. Цель изобретения - расширение функциональных возможностей. Тренажер для обучения операторов подвижного состава содержит расположенные на вращающемся стенде рабочие места, каждое из которых снабжено поручнем, подножкой, рычагом привода автосцепки и световым табло, шпренгельно-стержневую систему, кинематически связывающую рабочие места с имитаторами соударения вагонов и неисправностей поручня и подножки, рельс и макеты вагонных колес. Входы блока 10 управления процессом обучения подключены к выходам командоаппарата 11, датчиков 12 состояния поручней, подножек и рычагов приводов автосцепок и коммутатора 13, а выходы - к входам блока 14 регулирования скорости вращения стенда, имитаторов 15 соударений вагонов и неисправностей поручней и подножек и блока 16 управления световыми табло, причем входы коммутатора 13 соединены с выходами датчиков 17 положения колес и тормозных башмаков и датчиков 18 местонахождения обучаемых. Блок 10 представляет собой мик- роЭВМ в составе блока 19 центрального процессора и подключенных к интерфейсу 20 печатающего устройства 21, блоков оперативной 22 и внешней 23 , памяти, таймера 24 и портов ввода 25,26 и вьшода 27,28 сигналов управления. 2 з.п.ф-лы, 5 ил. СЛ САЭ СП Г СО ю гв Фиг. 2 IS 1 I /«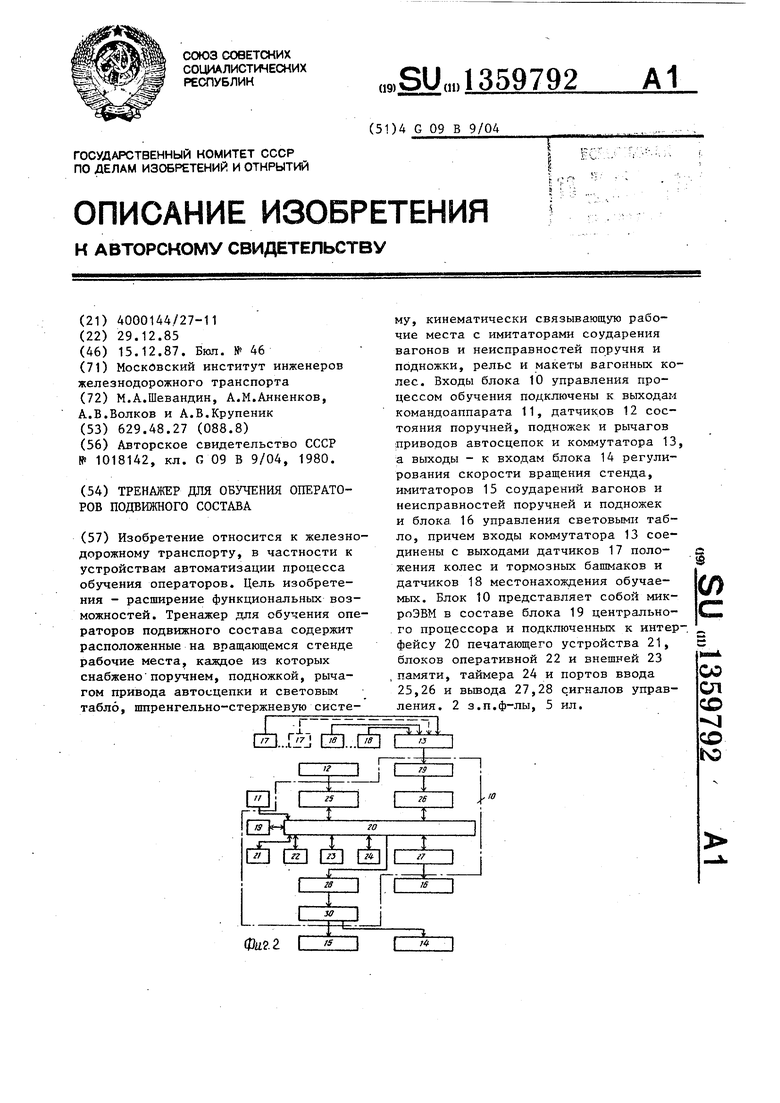
| Тренажер | 1981 |
|
SU1018142A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
