1
Изобретение относится к системам автоматического управления инерцион ными объектами и может быть использовано в химической, нефтехимическо и других отраслях промышленности.
Целью изобретения является повышение качества управления.
На чертеже изображена принципиальная схема системы автоматическог управления.
Система автоматического управлен содержит сумматор 1, объект 2 управ ления, элемент 3 сравнения, первый, второй и третий усилители 4,5 и 6 соответственно, интегратор 7, дифференциатор 8, четвертый усилитель 9, блок 10 определения модуля и блок 1 умножения.
Система работает следующим образом.
С помощью элемента 3 сравнения формируется сигнал ошибки
- X.(1)
С помощью первого усилителя 4 формируется сигнал пропорциональной (п) составляющей управляющего воздествия
и
К.
(2) 30
25
С помощью второго усилителя 5 и интегратора 7 формируется сигнал интегральной (и) составляющей
и j к Sdt.
(3)
с помощью дифференциатора 8 и усилителя 6 формируется сигнал дифференциальной (д) составляющей
и К.(4)
С помощью блоков 10, 11 и 9 формируется сигнал ассоциативной (а) составляющей
(5)
,,И ..Н ..U
к , к и К являются
с помощью сумматора 1 формируется управляющее воздействие
и -ь и
на объект
(6) 2 управлекотороения.
Формула изобретения
которое ния. 5
0
0
0
Система автоматического управления, содержащая сумматор, подключенный выходом к входу объекта управления, выход которого соединен с первым входом элемента сравнения, второй вход которого подключен к входу системы, выход элемента сравнения соединен с входами первого усилителя, 5 второго усилителя и дифференциатора, выход первого усилителя подключен к первому входу сумматора, выход второго усилителя соединен через интегратор с вторым входом сумматора, третий вход которого подключен через третий усилитель к выходу дифференциатора, отличающаяся тем, что, с целью повьшения качества управления, в нее введены блок определения модуля, блок умножения и четвертый усилитель, выход которого соединен с четвертым входом сумматора, вход блока определения модуля подключен к выходу дифференциатора, первый вход блока умножения соединен с ,выходом блока определения модуля, второй вход блока умножения подключен к выходу элемента сравнения, а выход - к входу четвертого усилителя.
5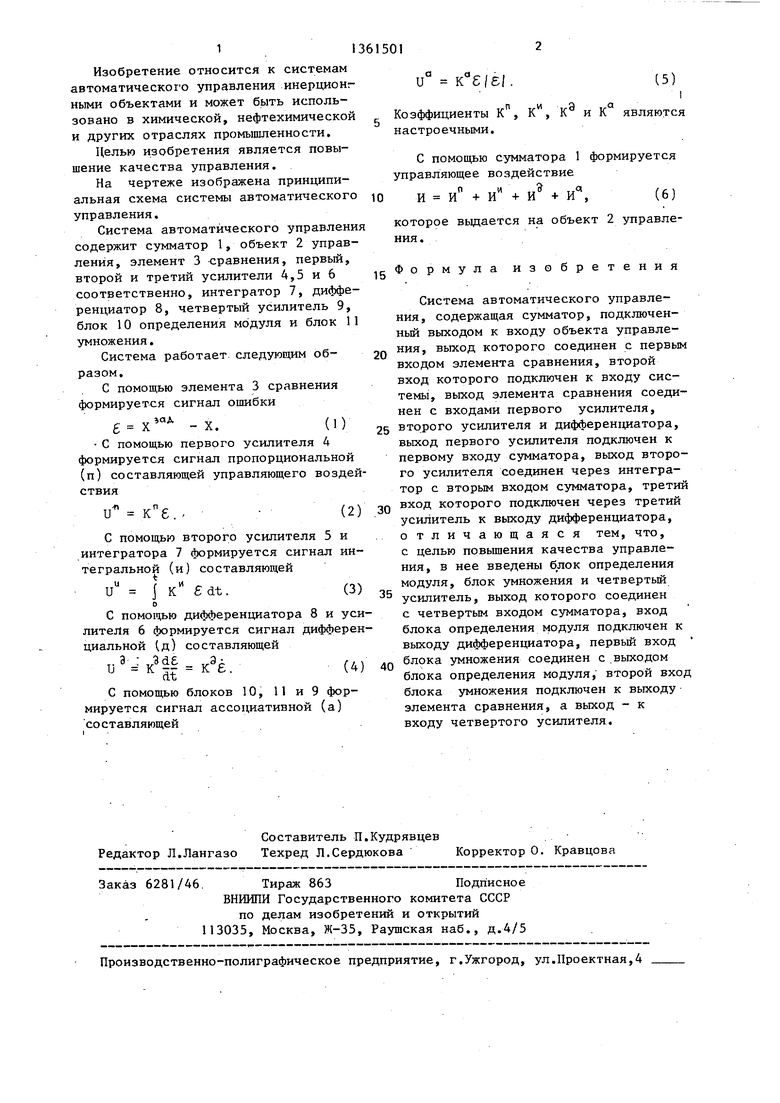
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования | 1987 |
|
SU1462235A1 |
| Адаптивный регулятор | 1977 |
|
SU746414A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
| ЭЛЕКТРОПРИВОД С АВТОМАТИЧЕСКОЙ ПОДСТРОЙКОЙ ЧАСТОТЫ ВХОДНОГО ГАРМОНИЧЕСКОГО СИГНАЛА | 2008 |
|
RU2399079C2 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ | 2015 |
|
RU2605946C1 |
| Адаптивный регулятор с регулируемой обратной связью | 1985 |
|
SU1287104A1 |
| Система цифрового управления | 1981 |
|
SU970319A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| Регулятор с переменной структурой | 1978 |
|
SU736046A1 |
Изобретение относится к системам автоматического управления инер-. ционными объектами и может быть использовано в химической, нефтехимической и других отраслях промышленности. Цель изобретения - повьшение качества управления. Система содержит сумматор 1, связанный выходом с объ-: ектом 2 управления и входами - через первый усилитель 4, последовательно соединенные второй усилитель 5 и интегратор 7 и последовательно соеди- иенные дифференциатор 8 и третий усилитель 6 - с элементом 3 сравнения, связанньм входом с объектом 2 управления. В систему дополнительно введены последовательно соединенные блок определения модуля 10, блок умножения 11 и четвертый усилитель 9, связанный выходом с сумматором 1. При этом вход блока определения модуля 10 подключен к выходу дифференциатора В, а один из входов блока умножения 11 - к выходу элемента 3 сравнения. 1 ил. S (Л .3ffff со о: ел ULPUL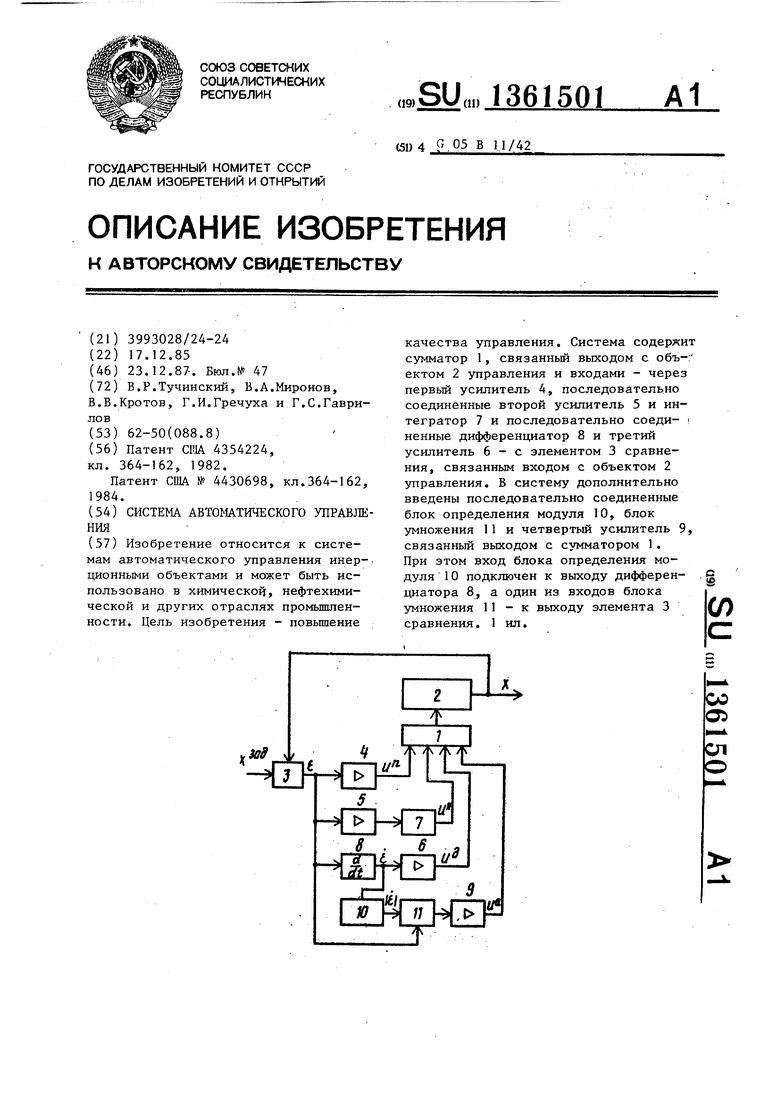
| Патент СМ 4354224, кл | |||
| Способ получения мыла | 1920 |
|
SU364A1 |
| Патент США № 4430698, кл.364-162, 1984. | |||
