(54) СИСТЕМА ЦИФРОВОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления для объектов с запаздыванием | 1984 |
|
SU1229726A1 |
| Адаптивный регулятор | 1987 |
|
SU1432459A1 |
| Автоматизированная система управления рудовосстановительной электропечи | 1981 |
|
SU954770A1 |
| Самонастраивающееся устройство управления | 1983 |
|
SU1130830A1 |
| Адаптивный пропорционально-интегральный регулятор для инерционных объектов | 1974 |
|
SU551607A1 |
| Система автоматического управления | 1985 |
|
SU1361501A1 |
| Устройство для программного управления приводом | 1984 |
|
SU1226410A1 |
| Устройство для интегрирования частотно-импульсных сигналов | 1984 |
|
SU1160444A1 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
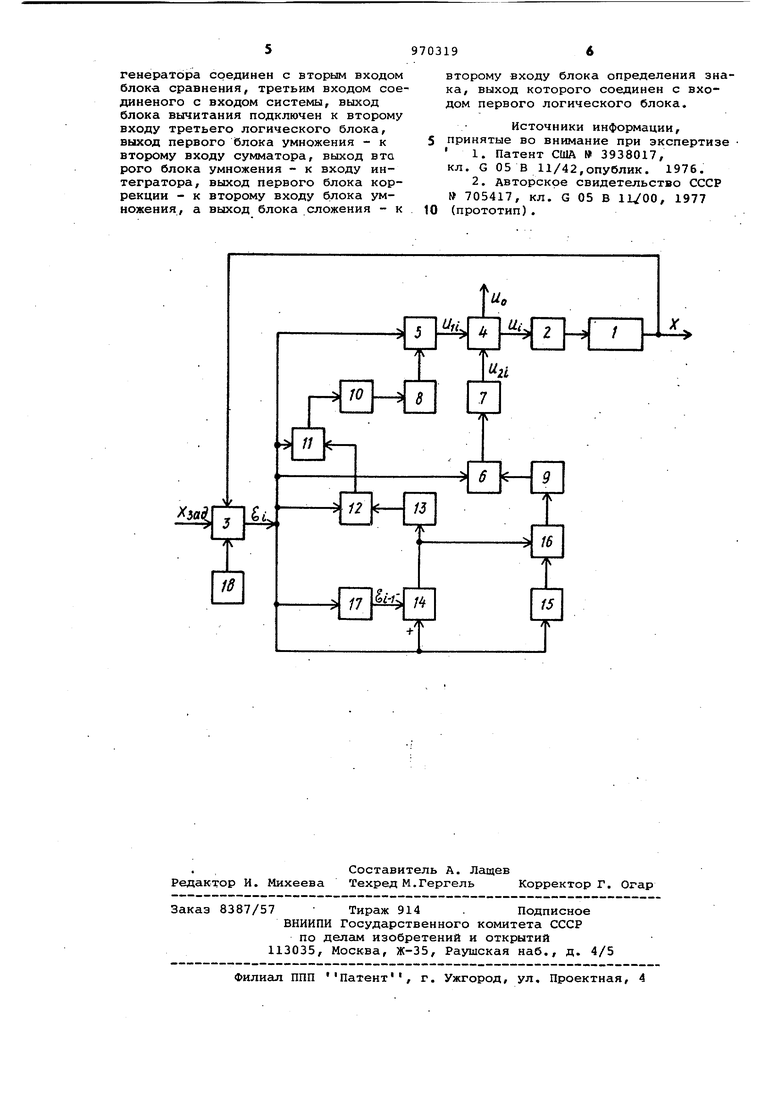
Изобретение относится к системам автоматического управления технологическими процессами и может быть использовано в химической, нефтехимической и других отраслях промышленности. Известна система пропорциональноинтегрального регулирования, содержащая объект управления, чувствитель ный элемент, исполнительный блок, сумматор, блоки пропорционального и интегрального регулирования, а также блок отключения пропорционешьной составляющей регулирования 1. Система характеризуется недостато но высокой точностью, поскольку не предусматривается выбор эффективной величины пропорционального и интегрального сигналов в зависимости от уровня сигнала ошибки, не учитывается скорость изменения ошибки. Наиболее близкой к предлагаемой по технической сущности является сис тема управления, содержащая блок определения знака, последовательно сое диненные блок сравнения и первый бло умножения и последовательно соединен ные интегратор, сумматор и исполни-тельный блок, выход которого связан с объектом управления, выходом соединенного с перввм входом сравнения 2 Основным недостатком известной системы является невысокая точность отработки управляющего сигнала вследствие недостаточно эффективного выбора пропорциональной и интегральной составляющих, особенно в зоне малых ошибок. Цель изобретения - повышение точности системы. Указанная цель достигается тем, что в систему введены тактовый генератор, последовательно соединенные первый логический блок и первый блок коррекции, последовательно соединенные второй логический блок, третий логический блок, второй блок коррекции и второй блок умножения и последовательно соединенные блок памяти, блок вычитания, третий блок умножения, блок сложения, второй вход которого подключен к выходу блока сравнения, к входу блока йамяти, к второму входу блока вычитания, к второму входу второго блока умножения и к входу второго логического блока, причем выход тактового генератора соединен с вторым входом блока сравнения, третьим входом соединенного с входом системы, выход блока вычитания подкл чен к второму входу третьего логиче кого блока, выход первого блока умножения - к второму входу сумматора выход второго блока умножения - к входу интегратора, выход первого бл ка коррекции - к второму входу блок умножения, а выход блока сложения к второму входу блока определения зн ка выход которого соединен с входом первого логического блока. Блок-схема системы цифрового управления приведена на чертеже. Система содержит объект 1 управления, исполнительный блок 2, блок 3 сравнения, сумматор 4, первый и второй блоки 5 и 6 умножения, интегратор 7, первый и второй блоки 8 и 9 коррекции, первый логический блок 10 блок И определения знака, блок 12 сложения,, третий блок 13 умножения, блок 14 вычитания, второй и третий логические блоки 15 и 16, блок 17 памяти и тактовый генератор 18. Система работает следующим образо С заданной дискретностью, по сигНсшу от такт ового генератора 18, в блоке 3 сравнения определяется отклонение текущего значения регулируемой переменной X от заданного значе на выходе формируется сигнал, пропорциональный ошибке управления . По значению ошибки в каждом i-ом такте управления сумматором 4 формируется правляющее воздействие, подаваемое на объект 1 через исполнительный блок 2. Это воздействие описывается выражением , гдеи. пропорциональная состав ляющая, вычисляемая бло I , ком 5; ui- Kj g - интегральная составля ющая, определяемая с по мощью блоков 6 и 7, К ,К - коэффициенты соответственно пропорциональной и интегральной составляющих . С помощью блоков И-14 и 17 рассчитывается величина x..tg,-g..)si9fH6,-; (2) характеризующая динамическое отклонение величины X от задания. В первом логическом блоке 10 про веряется условие А.1 ХЛ при выполне нии которого выдается сигнал в первый блок 8 коррекции. Блок 8 выбира значение козффициента К при поступлении сигнала от блока 10; К при отсутствии сигнала от блока 10, причем . Во втором логическом блоке 15 проверяется условие|Е -1 сГ. В случае его выполнения осуществляется проверка третьим логическим блоком 16 условия| - - I |5 , при выполнении которого выдается сигнал во второй блок 9 коррекции. Блок 9 выбирает значение коэффициента Kj,: КОЭФФИ1 г„ при поступлении сигнала от блока 16; иа Р отсутствии сигнала от блока 16, причем К гК лгЗначения козффициентов Кр , К,, Кщ f К,2., а также величины Д., оС djf% выбираются в зависимости от свойств объекта управления и требований к системе. Увеличение интегральной составляющей при малых значениях ошибки (при условии также ограниченной скорости ее изменения) позволяет быстро устранять статическую ошибку и поддерживать высокую точность регулирования, а коррекция величины пропорциональной составляющей обеспечивает Эффективное торможение процесса управления при приближении регулируемой переменной к заданию. Так, например, применительно к процессу дегидрирования изоамиленов производства изопрена система позволяет повысить точность стабилизации температуры в реакторе, что существенно повышает качество целевого продукта и снижает энергозатраты по производству не менее чем на 0,4%. Формула изобретения Система цифрового управления, содержащая блок определения знака, последовательно соединенные блок сравнения и первый блок умножения и последовательно соединенные .интегратор, сумматор и исполнительный блок, выход которого связан с объектом управления, выходом соединенного с первым входом блока сравнения, отличающаяся тем, что, с целью повышеция точности, в нее введены тактовый генератор, последовательно соединенные первый логический блок и первый блок коррекции, последовательно соединенные второй логический блок, третий логический блок, второй блок коррекции и второй блок умножения и последовательно соединенные блок памяти, блок вычитания, третий блок умножения, блок сложения, второй вход которого подключен к выходу блока сравнения, к первому входу блока определения знака, к входу блока памяти , к второму входу блока вычитания, к второму входу.второго блока умножения и к входу второго логического блока,причем выход тактового
генератора соединен с вторым входом блока сравнения, третьим входом соединеного с входом системы, выход блока вычитания подключен к второму входу третьего логического блока, выход первого блока умножения - к второму входу сумматора, выход BTG рого блока умножения - к входу интегратора, выход первого блока коррекции - к второму входу блока умножения, а выход блока сложения - к
второму входу блока определения знака, выход которого соединен с входом первого логического блока.
Источники информации, принятые во внимание при экспертизе 1. Патент США 3938017, кл. G 05 В 11/42,опублик. 1976.
