1
Изобретение относится к системам автоматического управления и может быть использовано для автоматического регулирования промышленных, в частности нефтеперерабатывающих и нефтехимических, объектов с запаздыванием, переходные процессы которых описываются передаточными функциями вида:
W.i (Р) sn ,
где - коэффициент передачи объекта;
a.j, (,n) - параметры, характеризующие динамику объек
Т - постоянная времени запаздывания;
п - порядок объекта, являющийся конечным числом, которое практически в большинстве случаев не превышает 3, В процессе регулирования параметра К коэффициент передачи объекта изменяется в широком диапазоне:
tntn оо tncxx
Требуемое качество работы системы регулирования, заключающееся в обеспечении оптимальной (предельной) степени устойчивости и интег- рально-квадратической ошибки, в условиях изменения параметра К достигается за счет оптимальной компенсации влияния запаздывания и автоматической адаптации параметров регулятора к изменяющимся параметрам объекта и внешним возмущающим воздействиям.
Цель изобретения - повышение устойчивости и точности, улучшаюшде качество переходного процесса регулирования объектов с запаздыванием.
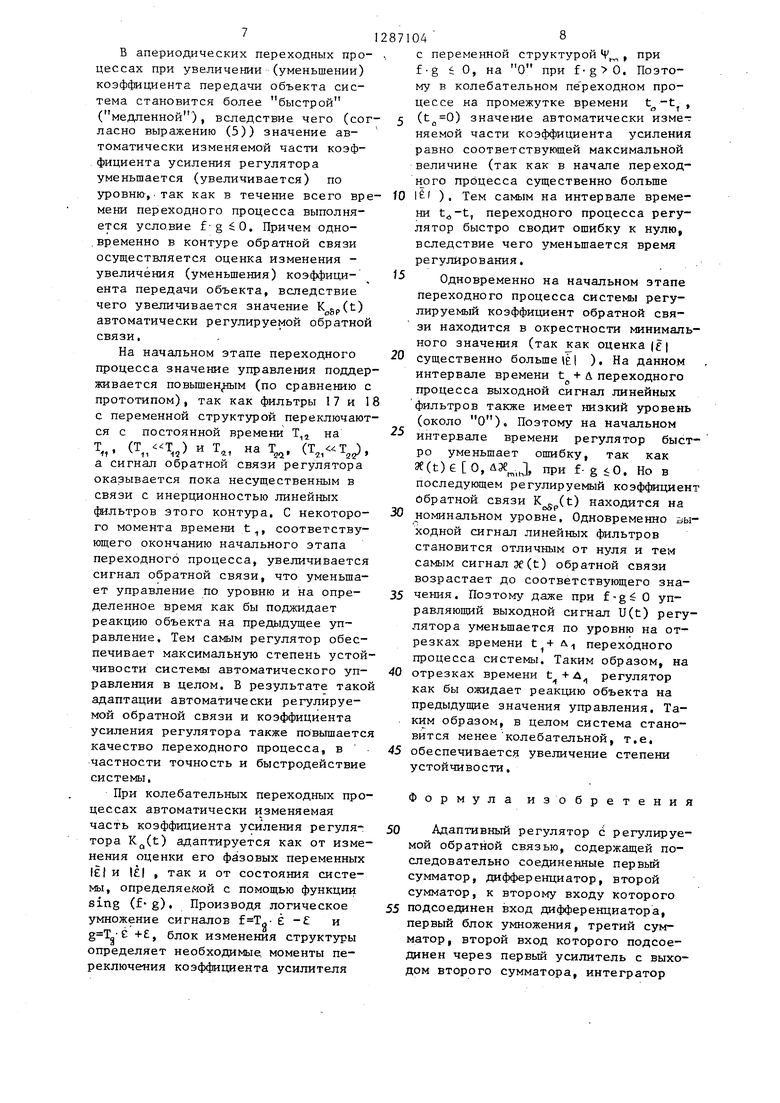
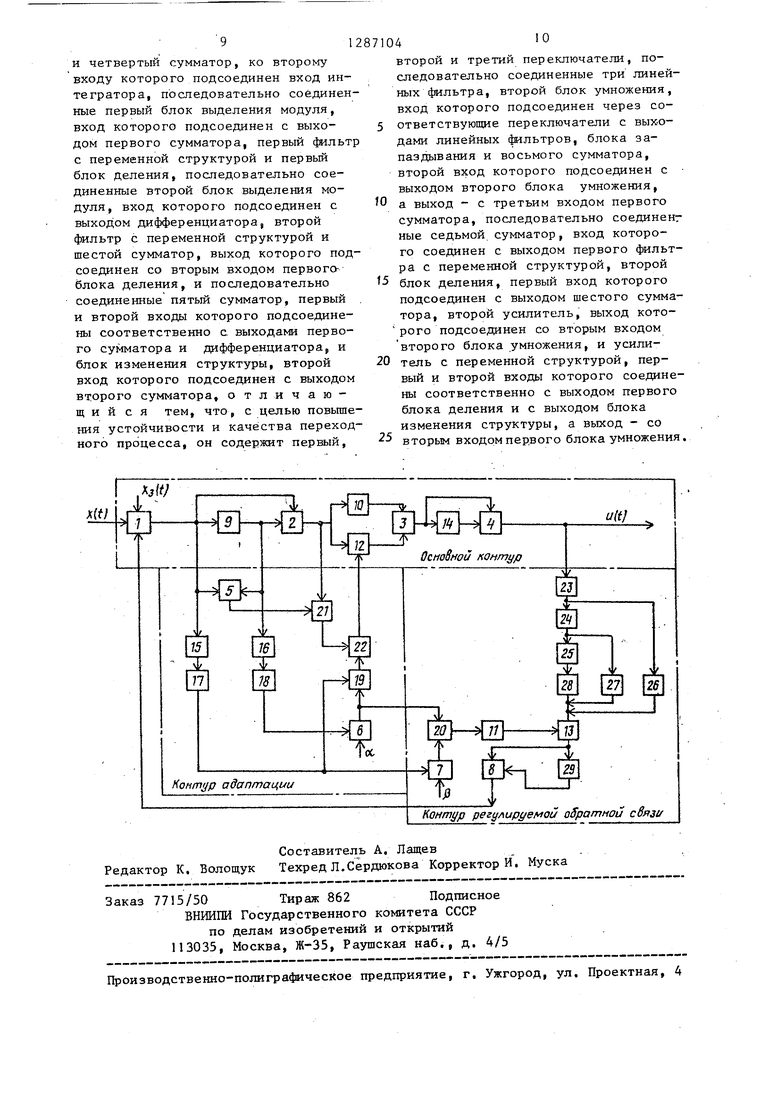
На чертеже изображена блок-схема регулятора.
Устройство содержит сумматоры 1-8, дифференциатор 9, первый 10 и второй 11 усилители, первый 12 и второй 13 блоки умножения, интегратор 14, первый 15 и второй 16 блоки вьщеления модуля, первый 17 и второ 18 фильтры с переменной структурой, первый 19 и второй 20 блоки деления блок 21 изменения структуры, усилитель 22, первый 23, второй 24 и третий 25 линейные фильтры, переключатели 26-28 и блок 29 запаздывания.
Регулятор реализует следующий закон управления:
U(t) ((t))- (t)+Tg-(t) + + Г/ ((0) (0)+Т -е (0)1 dG.
(2) (3)
(4)
-и о
(t)x3(t)-x(t)-3e(t), e(t)y(t)-y(t-t),
K.S, (t)(t)n()U(t),,
P dt
Tg и T
где (t) - ошибка регулирования; x(t)
и X (t) - соответственно регулируемая выходная координата объекта и задание; t - время;
е - переменная интегрирования;
и Кд - соответственно постоянная и автоматически изменяемая (адаптируемая) части коэффициента усиления основного контура регулятора;
- соответственно постоянная времени дифференци- рования и интегрирования;
3e(t) - сигнал обратной связи по выходному сигналу регулятора U(t);
Х - постоянная времени блока запаздывания;
п - количество последовательно соединенных фильтров, изменяемое с помощью фильтров в пределах от 1 до 3;
j (. ; ,2,
3)- соответствующее постоянные времени линейных фильтров;
(t) - автоматически регулируемый коэффициент усиления в цепи обратной связи регулятора,
Регулятор работает следующим образом.
Регулируемый выходной сигнал объекта x(t) и задание х (t) посту- пают на первый (минусовой) и второй (плюсовой) входы сумматора выходной сигнал (t) которого поступает на вход дифференциатора 9 и на вторые входы сумматоров 2 и 5,
31
Одновременно на третий (минусовой вход сумматора 1 поступает выходной сигнал контура обратной связи регулятора. На выходе дифференциатора 9 фор1 руется реальная производная
сигнала (t), которая поступает на первые входы второго 2 и пятого 5 сумматоров. Выходной сигнал +Т второго сумматора 2, поступая на вход первого усилителя 10 и на пер- вый вход первого блока 12 умножения умножается соответственно на постоянную К и автоматически изменяемую часть коэффициента усиления К„(й), Одновременно на второй вход первого блока 12 умножения поступает сигнал Ka(t) с выхода первого блока 19 деления контура адаптации,
Выходные сигналы первого усилителя 10 и первого блока 12 умножения суммируются в третьем сумматоре 3, Выходной сигнал третьего сумматора
3,равный ((t))(e(t)+Tg.(t)). поступает на вход интегратора 14 и
на Первый вход четвертого сумматора
4,на второй вход которого подается выходной сигнал интегратора. На выходе четвертого сумматора 4 формируется выходной сигнал регулятора U(t) которьй одновременно поступает на входы объекта регулирования и контура обратной связи,
В контуре адаптации на основе сигналов ошибки регулирования и ее реальной производной формируется
автоматически изменяемая часть коэффициента усиления регулятора: .
K,(t)
где
(,), (5)
Ul +ot
ot - малая постоянная величина,, определяемая из условия физической реализуемости ;
Ф(,) - переменный масштабный коэффициент, определяемый в виде логической функции:
(Ч ,пpиf.g$0,g
,). ЛЬ
О , при f. , f Та-€-е
I
которая реализуется с помощью пятого сумматора 5, блока 21 изменения структуры и усилителя 22 с перемен- ной структурой;
и - соответственно максимальные значения модуля ошибки и ее реальной производной, формируе044
мые в блоках 15 и 16 выделения модуля и фильтрах 17 и 18 с переменной структурой по алгоритмам:
Т., iei . fT,,, при
т 1
Г11
Т, при( , Т, Т„
Тп/
ГТ„, при
(8)
при
, т,« т
11 22
где Tjj , ( l,2) - постоянные вре- мени фильтров 17 и 18 с переменной структурой.
Контур адаптации, содержащий сумматоры 5 и 6, блоки 15 и 16 выдепе- :ния модуля, фильтры 17 и 18 с переменной структурой, блок 19 деления, блок 21 изменения структуры и усилитель 22 с переменной структурой, работает следукнцим образом,
Выходной сигнал первого сумматора 1 поступает на первый вход пятого сумматора 5, на второй вход которого подается сигнал с выхода дифференциатора 9, В пятом сумматоре 5 формируется сигнал . Этот сигнал поступает на первый вход блока 21 изменения структуры, на второй вход которого подается сигнал § То-б+ с выхода второго сумматора 2, В блоке изменения структуры 21 производится логическое умножение сигналов f и g. Одновременно входные сигналы первого сумматора 1 и дифференциатора 9 поступают на входы первого 15 и второго 16 блоков выделения модуля, на выходе которых формируются соответственно сигналы (| и , Выходные сигналы блоков 15 и 16 поступают на входы первого 17 и второго 18 фильтров с переменной структурой. При выбранном соотношении постоянных времеии Т и Т. , (,2) фильтры 17 и 18 оценивают максимальное значение модуля ош1бки и ее реальной производной |ё( в соответствии с алгоритмами (7) и (8), Выходные сигналы фильтров 17 и 18 поступают на первые входы первого блока 19 деления и шестого сумматора 6, на второй вход которого подается постоянная величинаot.
Полученный на выходе шестого сумматора 6 сигнал, равный lf +d, поступает на второй вход блока 19 деления, на выходе которого формируется сигнал, равный ((/(./(+о(). Этот сигнал поступает на первый вход усилителя 22 с переменной структурой. На основе выходного сигнала sign (f g) блока изменения структуры, поступающего на второй вход усилителя 22 с переменной структу рой, на усилителе 22 устанавливается коэффициент усиления, равный Ч (при f.giO) или О при . На выходе усилителя с переменной структурой 22 формируется автоматически изменяемая часть коэффициента усиления регулятора K(t), равная f (€.) |ё| / () , которая поступает на второй вход первого блока 12 умножения основного контура,
В контуре обратной связи на основе выходного сигнала прямой цепи регулятора U(t) и сигналов контура адаптации |5(и lei формируются сигналы 9e(t), y(t), yCt-t) в соответ- ствии с (3), (4), оценки состояния управляемого объекта и автоматически регулируемый коэффициент усилия обратной связи по алгоритму
)K(.i+iet)/(),
о (9)
где К - постоянный масштабный
коэффициент; (3 - постоянный коэффициент,
причем О р 1;
IEI и (1 - выходные сигналы фильтров 17 и 18 с переменной структурой, определяемые по (7) и (8).
Контур обратной связи регулятора содержащий сумматоры 7 и 8, второй усилитель 11, второй блок 13 умножения, второй блок 20 деления, линейные фильтры 23-25, переключатели 26 28 и блок 29 запаздывания, работает следующим образом.
Выходной сигнал U(t) четвертого сумматора 4 поступает на вход последовательно соединенных линейных фильтров 23-25, на выходах которых формируются сигналы по алгоритмам:
TOBJ yj(t)+yj (t)yi., (t), - ,2,3,(10)
где y и у., (j l,2,3) - соответственно входные и выходные сигналы с|ильтров 23-25, причем у (t)U(t), Уд (t)y(t);
. - соответственно настроечные параметры фильтров 23-25,
Все выходные сигналы фильтров 23-25 через переключатели 26-28 поступают на первый вход блока 13 умножения, В зависимости от порядка
объекта п, (,2,3) один из переключателей 23-25 находится во включенном положении и замыкает выход соответствующего фильтра с входом блока 13 умножения, а остальные пере ключатели находятся в разомкнутом положении. Поэтому между входом U(t) и выходом y(t) фильтров имеется следующая зависимость:
Д(Т„.. . )-y(t)U(t),
п 1 ,2,3, р -,
Выходной сигнал фильтров y(t) в блоке 13 умножения умножается на
автоматически регулируемьм коэффициент усиления обратной связи (t)v На основе выходного сигнала первого 17 фильтра с переменной структурой 18/ , поступающего на первый вход
седьмого сумматора 7, на второй вход которого подается постоянньй сигнал , в сумматоре 7 формируется сигнал, равный (p+lef).
Сигналы с выходов сумматоров 6
и 7 поступают на соответствующие входы второго блока 20 деления, на выходе которого формируется сигнал, равный (ciL+ttl)/( 1), Последний поступает на вход второго усилителя
11, в котором формируется автоматически регулируемый коэффициент усиления обратной связи (t) и поступает на второй вход блока 13 умножения. Выходной сигнал блока 13
умножения поступает на входы блока 29 запаздывания и первый вход восьмого сумматора 8, на второй (минусовой) вход которого подается сигнал с выхода блока запаздывания. На
выходе сумматора 8 формируется сиг- нал обратной связи е (t), который поступает на третий (минусовой) вход сумматора 1 основного контура регулятора.
Предложенный регулятор в системе автоматического регулирования парирует изменения параметров коэффициента передачи объекта следующим образом.
7
В апериодических переходных процессах при увеличении (уменьшении) коэффициента передачи объекта система становится более быстрой
1287104
8
с переменной структурой Ч , при f.g i О, на О при . Поэтому в колебательном пе реходном процессе на промежутке времени t t,
fO
(медленной), вследствие чего (сог- 5 (,,0) значение автоматически изме
няемой части коэффициента усиления равно соответствующей максимальной величине (так как в начале переходного процесса существенно больше |Ё ). Тем самым на интервале времени , переходного процесса регулятор быстро сводит ошибку к нулю, вследствие чего уменьшается время регулирования.
Одновременно на начальном этапе переходного процесса системы регулируемый коэффициент обратной свя- эи находится в окрестности минимального значения (так как оценка существенно больше | ), На данном
ласно выражению (5)) значение автоматически изменяемой части коэффициента усиления регулятора уменьшается (увеличивается) по уровню, так как в течение всего времени переходного процесса выполняется условие f g iO. Причем одно- .временно в контуре обратной связи осуществляется оценка изменения - увеличения (уменьшения) коэффициента передачи объекта, вследствие чего увеличивается значение (t) автоматически регулируемой обратной связи.
На начальном этапе переходного процесса значение управления поддерживается повышен лзш (по сравнению с прототипом), так как фильтры 17 и 18 с переменной структурой переключаются с постоянной времени Т. на
15
20
интервале времени t + А переходного
25
процесса выходной сигнал линейных фильтров также имеет низкий уровень (около О). Поэтому на начальном интервале времени регулятор быстро уменьшает ошибку, так как
л
(Т.Т ) и Т, на Т„, (Т,
12
-2/J
а сигнал обратной связи регулятора оказывается пока несущественным в связи с инерционностью линейных 4ильтров этого контура, С некоторого момента времени t, соответствующего окончанию начального этапа переходного процесса, увеличивается сигнал обратной связи, что уменьшает управление по уровню и на определенное время как бы поджидает реакцию объекта на предыдзпцее управление. Тем самым регулятор обеспечивает максимальную степень устойчивости системы автоматического управления в целом, В результате тако адаптации автоматически регулируемой обратной связи и коэффициента усиления регулятора также повьшаетс качество переходного процесса, в частности точность и быстродействие системы.
При колебательных переходных процессах автоматически изменяемая часть коэффициента уси ления регулятора K(t) адаптируется как от изменения оценки его фйзовых переменных и |( , так и от состояния системы, определяемой с помощью функции sing (f g). Производя логическое умножение сигналов ё - и +, блок изменения структуры определяет необходимые, моменты переключения коэффициента усилителя
8
с переменной структурой Ч , при f.g i О, на О при . Поэтому в колебательном пе реходном процессе на промежутке времени t t,
fO
15
20
интервале времени t + А переходного
процесса выходной сигнал линейных фильтров также имеет низкий уровень (около О). Поэтому на начальном интервале времени регулятор быстро уменьшает ошибку, так как
9e(t)e o,, при . но в
последующем регулируемый коэффициент обратной связи (t) находится на номинальном уровне. Одновременно выходной сигнал линейных фильтров становится отличным от нуля и тем самым сигнал 3e(t) обратной связи возрастает до соответствующего зна-
чения. Поэтому даже при f-g О управляющий выходной сигнал U(t) регулятора уменьшается по уровню на отрезках времени л переходного процесса системы. Таким образом, на отрезках времени регулятор как бы ожидает реакцию объекта на предыдущие значения управления. Таким образом, в целом система становится менее колебательной, т,е,
обеспечивается увеличение степени устойчивости.
Формула изобретения
50
Адаптивный регулятор с регулируемой обратной связью, содержащей последовательно соединенные первый сумматор, дифференциатор, второй сумматор, к второму входу которого 55 подсоединен вход дифференциатора, первый блок умножения, третий сумматор, второй вход которого подсоединен через первый усилитель с выходом второго сумматора, интегратор
и четвертый сумматор, ко второму входу которого подсоединен вход интегратора, последовательно соединенные первый блок выделения модуля, вход которого подсоединен с выходом первого сумматора, первый (фильтр с переменной структурой и первьй блок деления, последовательно соединенные второй блок выделения модуля, вход которого подсоединен с выходом дифференциатора, второй фильтр с переменной структурой и шестой сумматор, выход которого подсоединен со вторым входом первого- блока деления, и последовательно соединенные пятый сумматор, первый и второй входы которого подсоединены соответственно с выходами первого сумматора и дифференциатора, и блок изменения структуры, второй вход которого подсоединен с выходом второго сумматора, отличающийся тем, что, с целью повышения устойчивости и качества переходного процесса, он содержит первый.
.
287104
второй и третий переключатели, последовательно соединенные три линейных фильтра, второй блок умножения, вход которого подсоединен через со5 ответствующие переключатели с выходами линейных фильтров, блока запаздывания и восьмого сумматора, второй вход которого подсоединен с выходом второго блока умножения,
О а выход - с третьим входом первого сумматора, последовательно соединенг ные седьмой сумматор, вход которого соединен с выходом первого фильтра с переменной структурой, второй
5 блок деления, первый вход которого подсоединен с выходом шестого сумматора, второй усилитель, выход кото- рого подсоединен со вторым входом второго блока умножения, и усили20 тель с переменной структурой, первый и второй входы которого соединены соответственно с выходом первого блока деления и с выходом блока
изменения структуры, а выход - со 25 вторым входом первого блока умножения.
А(;
Основной контур
Контур регулируемой о5ратмой свйзи
Составитель А, Лащев Редактор К. Волощук Техред Л.Сердюкова Корректор И. Муска
Заказ 7715/50Тираж 862Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-Э5, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный регулятор | 1984 |
|
SU1228073A1 |
| Регулятор с переменной структурой | 1978 |
|
SU736046A1 |
| Адаптивный регулятор | 1977 |
|
SU746414A1 |
| Устройство с размытой логической самоорганизацией для автоматического управления объектом,например ректификационной колонной | 1986 |
|
SU1434402A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Комбинированная система управления | 1987 |
|
SU1536352A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
Изобретение относится к системам автоматического управления и может быть использовано рд автоматического регулирования промышленных объектов, с запаздыванием и существенно изменяющимися параметрами, С целью повышения степени устойчиво-. сти и качества переходного процесса САУ объектами с запаздыванием, регулятор содержит основной контур, реализующий ШД закон регулирования, контур адаптации, формируннций автоматически изменяемую (адаптируемую) часть коэффициента усиления на основе сигналов ощибки регулирования и ее реальной производной, и вновь введенный контур обратной связи, регулируемой по выходному сигналу регулятора, а также первый, второй и третий переключатели, последовательно соединенные три линейных фильтра, второй блок умножения, блок запаздывания и восьмой сумматор, седьмой сумматор, фильтр с переменной структурой, второй блок деления, шестой сумматор, второй усилитель, и усилитель с переменной структурой. 1 ил. (Л С
| Регулятор с переменной структурой | 1978 |
|
SU736046A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
