1
Изобретение относится к системам автоматического управления и может быть использовано для автоматического регулирования общепрог лаленных, в частности, нефтеперерабатывающих и нефтехимических объектов, характеризующихся наличием инерционностей и запаздывания.
Известен адаптивный регулятор с переменной структурой 1, функционально состоящей из основного контура, который в последовательно сое.диненных блоках (дифференциаторе, первом сумматоре, второй вход которого соединен со входом дифференциатора, множительном устройстве, второй вход которого соединен с выходом ограничителя, интеграторе и втором сумматоре, второй вход которого соединен со входом интегратора) формирует пропорционально-интегрально-дифференциальный закон регулирования, и контура адаптации. Контур адаптации, содержащий последовательно соединенные блок yNMcwteния, входы которого соединены со входом дифференциатора и выходом первого сумматора, двухпозиционное реле, инерционное звено и ограничитель, выход которого соединен со вторым входом множительного устройства, формирует автоматически изменяемый коэффициент усиления как усредненное значение двух постоянных , уровней.
Наиболее близким техническим решением к изобретению является адаптивный рег улятор . , содержащий следовательно соединенные первЁШ сумматбр, дифференциатор, второй сумматор, первый усилитель, третий сумматор, интегратор и четвертый сумматор и последовательно соединен15 ные блок определения модуля, фильтр с переменной структурой, второй усилитель и блок умножения. Выход первого сумматора через последовательно соединенные второй сумматор,
20 блок умножения и третий сумматбр соединен со вторым входом четвертого сумматора.
Однако точность работы таких регуляторов недостаточна.
25
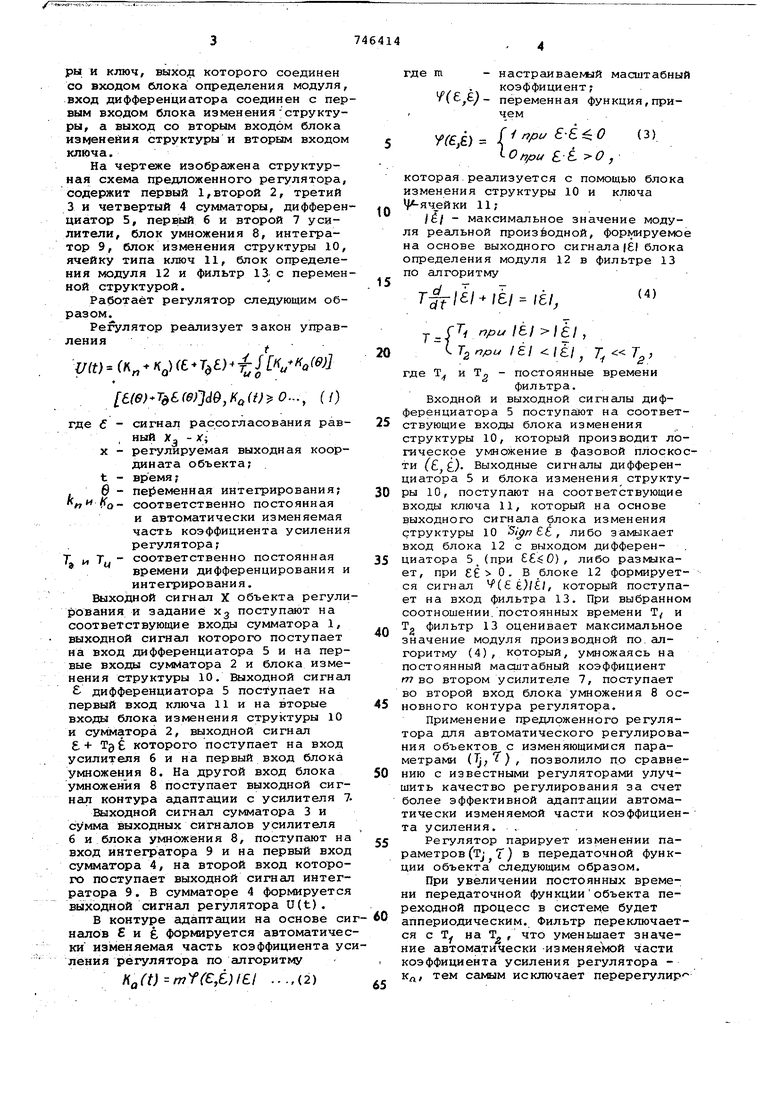
Повыиение точности работы регулятора - цель изобретения. Эта цель достигается тем, что предложенный регулятор содержит последовательно соединенные блок изменения структу30РЫ и ключ, выход которого соединен со входом блока определения модуля, вход дифференциатора соединен с пер вым входом блока измененияструктуры, а выход со вторым входом блока изменения структуры и вторым входом ключа. На чертеже изображена структурная схема предложенного регулятора, содержит первый 1,второй 2, третий 3 и четвертый 4 сумматоры, дифферен циатор 5, первый б и второй 7 усилители, блок умножения 8, интегратор 9, блок изменения структуры 10, ячейку типа ключ 11, блок определения модуля 12 и фильтр 13 с перемен ной структурой. Работает регулятор следующим образом. Регулятор реализует закон управленияU(t)()) e(6)-fd(,(... (О где f - сигнал рассогласования рав, ный х - ДГ; X - регулируемая выходная координата объекта; t - время; 6 - пе13еменная интегрирования; соответственно постоянная и автоматически изменяемая часть коэффициента усиления регулятора; 7 J, 7 - соответственно постоянная времени дифференцирования и интегрирования. Выходной сигнал X объекта регули рования и задание х поступают на соответствующие входы сумматора 1, выходной сигнал которого поступает на вход дифференциатора 5 и на первые входы сумматора 2 и блока изменения структуры 10. исходной сигнал дифференциатора 5 поступает на первый вход ключа 11 и на вторые входы блока изменения структуры 10 и сумматора 2, выходной сигнал , + Тд которого поступает на вход усилителя б и на первый вход блока умножения 8. На другой вход блока умножения 8 поступает выходной сигнал контура адаптации с усилителя 7 Выходной сигнсш сумматора 3 и сумма выходных сигналов усилителя б и блока умножения 8, поступают на вход интегратора 9 и на первый вход сумматора 4, на второй вход которого поступает выходной сигнал интегратора 9. В сумматоре 4 формируется выходной сигнал регулятора U(t). В контуре адаптации на основе си налов и формируется автоматичес ки изменяемая часть коэффициента ус ления регулятора по алгоритму Ka(t)mr(e,i) ....(2) где m- настраиваемый масштабный . коэффициент; т(у- переменная функция, причем ,е) f 6-е о (3) t- 7/7/: 0 у которая.реализуется с помощью блока изменения структуры 10 и ключа 11; /ё/ - максимальное значение модуля реальной производной, формируемое на основе выходного сигнала )) блока определения модуля 12 в фильтре 13 по алгоритму ,) при , 7 постоянные времени фильтра. Входной и выходной сигналы дифференциатора 5 поступают на соответствующие входы блока изменения структуры 10, который производит логическое умножение в фазовой плоскости (.,g). Выходные сигналы дифференциатора 5 и блока изменения структуры 10, поступают на соответствующие входы ключа 11, который на основе выходного сигнала блока изменения структуры 10 , либо замыкает вход блока 12 с выходом дифференциатора 5(при 0), либо размыкает, при О. В блоке 12 формируется сигнал ( ), который поступает на вход фильтра 13. При выбранном соотношении, постоянных времени Т/ и Tg фильтр 13 оценивает максимальное значение модуля производной по.алгоритму (4), который, умножаясь на постоянный масштабный коэффициент т во втором усилителе 7, поступает во второй вход блока умножения 8 основного контура регулятора. Применение предложенного регулятора для автоматического регулирования объектов с изменяющимися параметрами (Tj-f f ) , позволило по сравнению с известными регуляторами улучшить качество регулирования за счет более эффективной адаптации автоматически изменяемой части коэффициента усиления. .. Регулятор парирует изменении параметров (Tj Т) в передаточной функции объекта следующим образом. При увеличении постоянных времени передаточной функцииобъекта переходной процесс в системе будет аппериодическим. Фильтр переключается с Ту на Tg , что уменьшает значение автоматически изменяемой части коэффициента усиления регулятора к, тем самым исключает перерегулир

| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор с переменной структурой | 1978 |
|
SU736046A1 |
| Адаптивный регулятор с регулируемой обратной связью | 1985 |
|
SU1287104A1 |
| Адаптивный регулятор | 1984 |
|
SU1228073A1 |
| Устройство с размытой логической самоорганизацией для автоматического управления объектом,например ректификационной колонной | 1986 |
|
SU1434402A1 |
| Адаптивный пневматический регулятор | 1977 |
|
SU661505A1 |
| Регулятор с размытой логикой | 1988 |
|
SU1587466A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU631869A1 |
