Изобретение относится к самообу- . чающимся системам автоматического управления и может быть использовано для управления объектами с транспортным запаздыванием и возмущающими воздействиями типа смесей сыпучих мате- риалоэ, например, для автоматического управления процессами добычи и обогащения угля.
Цель - повьпиение точности системы.
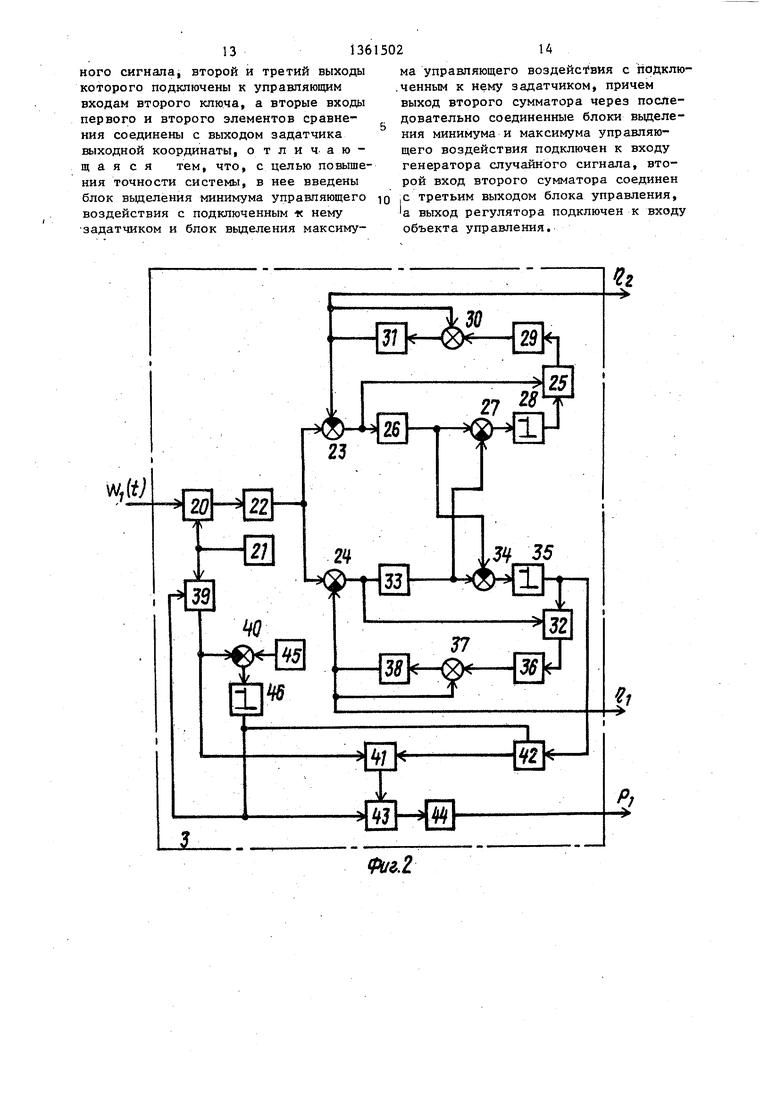
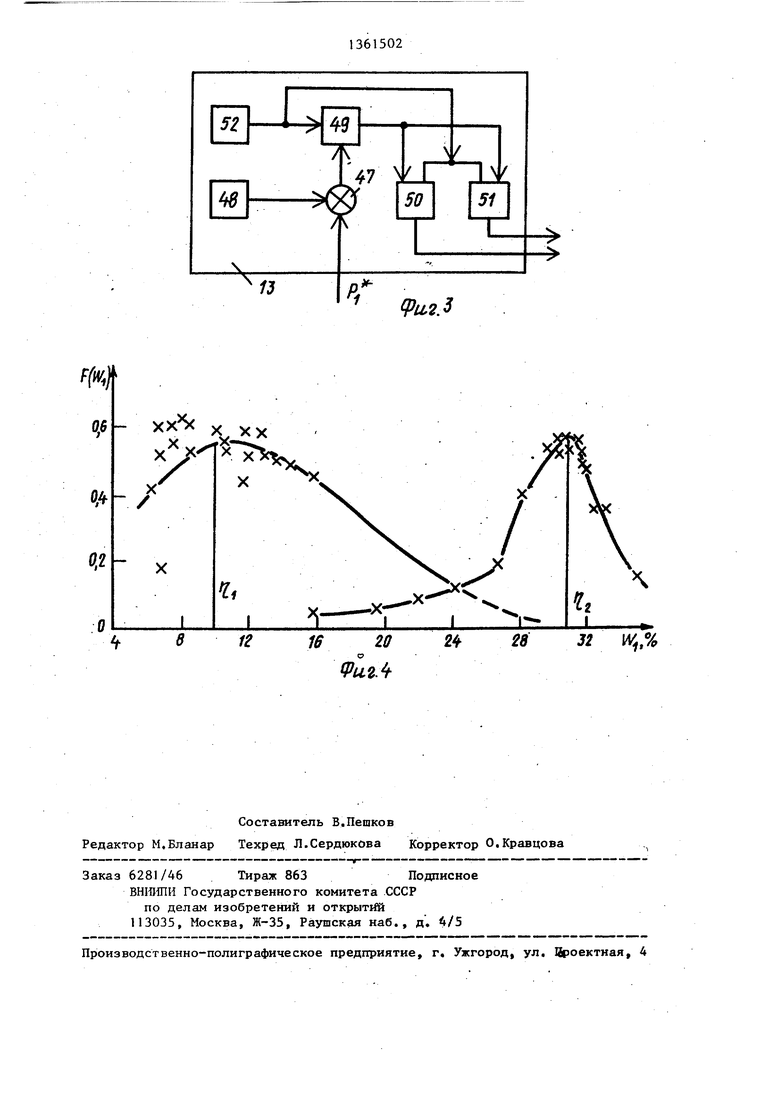
На фиг.1 представлена функциональная схема .устройства; на фиг.2 - функциональная схема блока управления; на фиг.З - функциональная схема генератора случайного сигнала; на фиг.4 - совместная плотность распределения вероятности возмущающего воздействия.
Адаптивная система управления содержит объект 1 управления (в объект управления включен исполнительный орган) , датчик 2 возмущающего воздействия, подключенный к входу блока 3 управления, первый и второй выходы которого через первый 4 и второй 5 ключи подключены к входам сумматора 6, выход последнего через последовательно включенные статическую модель
7объекта управления, первый элемент
8сравнения и регулятор 9 подключен к управляющему входу объекта 1 управления. Выход последнего через последовательно включенные датчик 10 выходной координаты, второй элемент 11 сравнения подключен к входу корректирующего регулятора 12. К второму входу элемента 1.1 сравнения подключен выход задатчика 13 выходной координаты. Выход регулятора 12. соединен с первым входом второго сумматора
14, к второму входу которого подключен третий выход блока 3 управления. К управляющим входам ключей 4 и 5 подключены соответствующие выходы генератора 15 случайного сигнала, выход второго сумматора через блоки выделения минимума 16 и максимума 17 управляющего воздействия подключен к входу генератора 15 случайного сигнала. Выход задатчика 18 (верхней гранищ) минимума управляющего воздействия ) подключен к входу блока 16 выделения минимума и выход задатчика
19 (нижней границы) подключен к входу 55 Р последовательно включенный тре- блока 19 выделения максимума управ- тий пороговый элемент 46 соединен с ляющего воздействия.управляющими входами счетчиков 39 и
Блок 3 управления (фиг.2) содер- 42 импульсов, а также с управляемым жит ключ 20, на вход которого подклю- входом управляемого ключа 43.
15022
чен выход датчика 2 возмущающего воздействия. На управляющий вход ключа 20 подключен выход генератора 21 с импульсов, а выход этого ключа соединен с блоком 22 памяти. Выход последнего соединен с первыми входами элементов 23 и 24 сравнения. Выход элемента 23 сравнения подключен на вхо- 10 ДЫ умножителя 25 и квадратора 26. Выход квадратора 26 через последовательно включенные-элемент 27 сравнения и пороговый элемент 28 соединен с вторым входом умножителя 25, выход 15 которого через последовательно включенные усилитель 29, сумматор 30, дискретный элемент задержки соединен с вторым входом элемента 33 сравнения и вторым входом су1 1матора 30. 20 Выход элемента сравнения 24 подклю- чен на выходы умножителя 32 и второго квадратора 33. Выход квадратора 33 через последовательно включенные элемент сравнения 34 и пороговый 25 элемент 35 соединен с вторым входом второго умножителя 32, выход которого через последовательно включенные второй усилитель 36, второй сумматор 37 и второй дискретный элемент 38 30 задержки соединен с вторым входом элемента 24 сравнения и вторым входом сумматора 37. Выход квадратора 26 соединен также с вторым входом элемента 34 сравнения, а выход квадратора 33 - с вторым входом элемента 27 сравнения.
Выход генератора 21 импульсов также под шючен на вход счетчика 39 им- . пульсов, выход которого подключен 40 на первый вход элемента 40 сравнения и на первый вход делителя 41, на второй вход которого через последовательно включенный счетчик 42 импульсов подключен выход порогового эле- 5 мента 35. Выход делителя 41 через последовательно включенные управляемый ключ 43 и блок 44 памяти, сумматор 14, блоки выделения минимума 16 и максимума 17 управляющего воздей- gg ствия подключен на управляемый вход управляемого генератора 15 случайного сигнала. Задатчик 45 числа импульсов подключен на второй вход элемента 40 сравнения, выход которого че35
Управляемый генератор 15 случайного сигнала (фиг.З) состоит из суматора 47, на первый вход которого подключен выход дискретного блока 44 памяти, а на второй вход подключен выход генератора 48 шума. Выход сумматора 47 подключен на управляющий вход ждущего мультивибратора 49 выход которого соединен с первым Входом элемента И 50 и первым входом элемента И-НЕ 51. На вход ждущего мультивибратора 49 и на вторые входы элементов И 50 и И-НЕ 51 подключен . выход генератора прямоугольных импульсов 52. Выходы элементов И 50 и И-НЕ 51 подключены к управляющим входам ключей 4 и 5.
Адаптивная система управления работает следующим образом.
На фиг.4 обозначены: W - значени возмущающего воздействия, F(W ) - совместная плотность распределения вероятности возмущающего воздействия .,
Изменения величины возмущающего воздействия представляют собой сумму (смесь) двух случайных процессов со средними значениями и Ч закон распределения которых близок к нормальному.
При управлении такими объектами важно знать параметры, из которых образована конечная (наблюдаемая) смесь - возмущающее воздействие (например, смесь рядового-угля, поступающего на процесс обогащения). Выражение для функций распределения вероятности смеси для случая двух классов (двух составляницих) возмущающего воздействия имеет вид
F(W, )PF,(W,/,)+(1-P)F2(W2/2,)
(U
где F(W,) - функция распределения параметров смеси возмущающего воздействия (W, - зольность, влажность сыпучего материала и др.);
Fj(W,/,)- функция распределения вероятности первого класса составляющей возмущающего воздействия со средним (наиболее вероятным) значением , J
Fj(W, функция распределения . вероятности второго класса составляющей
5
0
Р возмущающего воздействия со средним (наиболее вероятным) значением 1 ;
вероятность появления значения W, из класса
F, (w,/2.);
Задача управления в этом случае ставится следующим образом: требует- . ся, наблюдая.смешанную реализацию возмущающего воздействия F(W,) разделить смесь на классы и определить их параметры 1, 1 я Р, на основании 5 которых корректировать (случайным образом) значения управляющей координаты объекта управления таким образом, чтобы среднее значение выходной координаты объекта было равно 0 заданному. Это позволяет рассматривать управление объектом, как статистическую игру двух игроков: природы и систеь управления, в которой игрок II - система управления являет- 5 ся статистиком, а игрок I - природа. В качестве стратегий природы выступают средние значения процессов , и ч J которые появляются с вероятностями Р и (l-P), а для системы управ- 0 ,ления - соответствующие этим режимам значения входной управляющей) координаты объекта управления.
Управление в этом случае сводится к определению стратегий природы 2, 5 и вероятности их появления Р и (1-Р), определения для этих стратегий значений входных координат объекта управления-S , и Sj, которые являются стратегиями системы управле- 0 ния, и смешивания (рандомизации) стратегий S, и Sj системой управления с вероятностью Р и (1-Р), так, что среднее значение выходной координаты объекта управления равно за- g данному значению выходной координаты (задатчик 13).
Сигнал с датчика 2 возмущакнцего воздействия подается на вход блока 3 управления, в котором этот сигнал разделяется на два класса (два случайных процесса) и определяются средние значения возмущающего воздействия для этих двух классов: и
55
2 ; а также вероятности их появления Р и 1-Р.
Сигнал с генератора 21 импульсов подается на управляющий вход ключа 20, который, замыкаясь, подает сигнал с датчика 2 возмущающего воздей513
ствия на вход блока 22 памяти. Этот блок запоминает значение сигнала от датчика 2 возмущающего воздействия в момент замыкания ключа 20, При отсутствии сигнала с генератора 21 импульсов ключ 20 размыкается, при этом сигнал с датчика 2 возмущающего воздействия на блок 22 памяти не проходит и на выходе блока 22 остается сигнал, соответствующий сигналу с датчика 2 в момент замыкания ключа 20. При следующем замыкании ключа 20 происходит стирание ранее посту- пившего сигнала в блоке 22 памяти и запоминание нового значения сигнала от датчика 2 возмущающего воздействия .
Таким образом, на выходе блока 22 памяти образуются дискретные значение сигнала от датчика 2 возмущающего воздействия, соответствующие моментам замыкания ключа 20, Сигналы с выхода блока .22 памяти подаются на первые:входы элементов 23 и 24 сравнения, где из этого сигнала вычитаются сигналы от дискретных элементов 31 и 38 задержки.
Разностный сигнал с выхода элемента. 23 сравнения подается на вход квадратора 26, а разностный сигнал с выхода элемента 24 сравнения подается на вход квадратора 33. Квадраты разностных сигналов с блоков 26 и 33 сравнивают.ся между собой на элементах 27 и 34 сравнения.
Если разность квадратов сигнала рассогласования на выходе элемента 27 сравнения меньше нуля, то при попадании этого сигнала на пороговый элемент 28 на его выходе появляется сигнал, равный единице, и после умножения этого единичного сигнала в умножителе 25 на разностный сигнал с элемента 23 сравнения этот сигнал усиливается усилителем 29 и поступает на сумматор 30, где он суммируется с вьгходным сигналом дискретного элемента 31 задержки. Однако на выходе элемента 31 задержки суммарный сигнал с выхода сумматора 30 появляется при следующем поступлении сигнала на вход сумматора 30 с умножител 25, т,е, происходит задержка дискретного сигнала на один шаг.
Если, разность квадратов сигнала рассогласования на выходе элемента 27 сравнения больще нуля, на выходе порогового элемента 28 имеется сиг502
нал, равный нулю, и после умножения этого нулевого сигнала на разностный сигнал от элемента 23 .сравнения на выходе умножения 25 величина сигнала равна нулю и на вход сумматора 30 сигнал не поступает, при этом значения сигналов как на входе, так и на выходе дискретного элемента 31 задержки не изменяются. Однако, если разность квадратов сигнала рассогласования на выходе -элемента 27 сравнения больше нуля, на выходе элемента 34 сравнения она меньше нуля, так
5 как сигналы с квадраторов 26 и 33 подаются на элементы 27 и 34 сравнения с разными знаками.
Поэтому сигнал на выходе элемента 34 сравнения меньше нуля, а следова0 тельно, и на выходе порогового элемента 35 появляется сигнал, равный единице. После умножения этого единичного сигнала с умножителем 32 на разностный сигнал от элемента 24
5 сравнения этот сигнал усиливается усилителем 36 и подается на вход сумматора 37, где он суммируется с выходным сигналом дискретного элемента 38 задержки. Однако на выходе элемен0 та 38 задержки этот сигнал появляется с задержкой на один шаг. I
Таким образом, в зависимости от соотношения величин квадратов разностного сигнала рассогласования между поступившим дискретным сигналом от датчика 2 возмущающего воздействия и выходными сигналами с дискретных элементов 31 и 38 задержки, разностный сигнал с выходов элементов 23 и 24 сравнения поступает на соответствующие входы дискретных элементов задержки, после усиления усилителями 29 и 36 и корректирует выходные величины дискретных элементов 31 и 38 задержки с задержкой на один шаг работы ключа 20. Величина коррекции задается величиной коэффициента усиления усилителей 29 и 36 и выбирается из условия требуемого интервала усреднения.
Следовательно, на выходах элементов 31 и 38 образуются средние значения составляющих возмущающего воздействия с 7, и 1 для каждого класса ( стратегия природы), которые являются выходными сигналами блока 3 управления. Начальные значения выходных сигналов элементов 31 и 38 выбираются из условия J , .
5
0
5
0
п. -.
(2)
где т,
N.
п
7
Сигнал с выхода генератора 21 импулсов подается также на вход счетчика импульсов 39, который определяет число импульсов генерируемых генератором 21. Сигнал с выхода пороговог элемента 35 подается на вход счетчика 42 импульсов, который определяет число дискретных значений сигнала с датчика 2 возмущающего воздействия, отнесенных к первому классу , ,
Сигналы со счетчиков 39 и 42 импульсов подаются на входы делителя 41, на выходе которого определяется частота появления составляющих перв го класса i значений возмущающего воздействия W , т.е. определяется вьфажением
-. Ь
п
частота появления составляющих возмущающего воздействия первого класса; число значений сигнала с датчика 2, отнесенных, к первому классу; общее число дискретных значений (число импульсов с генератора 21), поступивших на вход блока 3 управления.
Число импульсов на выходе счетчика 39 импульсов сравнивается на элементе 40 сравнения с заданным числом импульсов, которое задается задатчи ком. 45 числа импульсов-и выбирается из требуемого интервала, на котором определяется частота (вероятность появления составляющих из первого класса возмущающего воздействия). Если число импульсов п стало больше
п., то на выходе элемента 40 сравнения появляется отрицательньй сигнал, который приводит к появлению единичного сигнала на выходе порогового элемента 46. Сигнал с порогового элемента 46 замыкает ключ 43 и сигнал с выхода делителяi равный частоте .появления составляющих первого класса т,, поступает на вход блока 44 памяти, одновременно сигнал с выхода порогового элемента 46 поступает на управляюпще входы счетчиков 39 и 42 с небольшой задержкой времени и обнуляет их.
Таким образом, на выходе блока 44 памяти образуется сигнал, равный
и,
- частоте появления составляющих
возмущающего воздействия, принадле10
0
1502
15
25
0
5
0
5
0
5
8
жащих к первому классу. Этот сигнал остается неизменным до следующего замыкания ключа 43, при котором прО исходит стирание ранее запомненного значения и запоминание нового.
Следовательно, частота т, примерно равна вероятности появления составляющих Wj(t) из первого класса F((W,/), т.е.
т, Р,
(3)
и чем больше выбран интервал (число
п.), на котором определяется величиf„
на т,,, тем с большей степени выполняется равенство (З).
Сигналы , и с выходов блока 3 управления через ключи 4 и 5 подаются на входы сумматора 6. На управляющие входы ключей 4 и 5 подаются сигналы с выхода генератора 15 слу чай- ного сигнала.
Таким образом, ключи 4 и 5 замыкаются случайным образом с вероятностями Р и (1-Р), которые определяются состоянием управляющего входа генератора 15 случайного сигнала.
Следовательно, при замьпсании ключа 4 на вход сумматора 6 поступает сигнал 1 блока 3 управления, а при 3 амь.}канк11 ключа 5 - сигнал и на выходе сумматора 6 последовательно появляются средние значения классов (стратегий природы) j и 2г с соответствующими вероятностями Р и (1-Р).
Выходной сигнал с сумматора 6 подается на статическую модель 7 объекта 1 управления по возмущающему входу, на выходе которой появляется сигнал, соответствующий выходной координате, объекта управления при поступлении на объект среднего значения класса .возмущающего воздействия , или 2 (в зависимости от того, какой из Ю1ючей 4 или 5 замкнут).
Выходной сигнал статической модели 7 объекта управления сравнивается с сигналом задатчика 13 на элементе 8 сравнения и в зависимости от сигнала рассогласования, регулятор 9 устанавливает два значения входной координаты объекта S, и S, соответствующих двум значениям стратегий природы, для чего сигнал с выхода регулятора 9 подается на управляющий вход объекта управления. Регулятор 9 представляет собой регулятор прямого типа и в простейшем случае это может быть усилитель.
Входные координаты S, и S определяются из условия инвариантности среднего значения выходной координаты объекта к возмущаюгдему воздейст- ;вию И вычисляются по вьфажениям
. )
K-(J
14) (5)
hg -. статический коэффициент
усиления объекта по возмущающему входу (коэффициент усиления статической модели 7 );
h,, - статический коэффициент усиления объекта по управляющему входу;
коэффициент усиления регулятора 9 прямого типа; заданное значение выходной
координаты объекта управпения;
,j - средние (наиболее вероятные) зна;чения составляющих возмущающего воздействия. Входные координаты S, и S являются стратегиями системы управления, а так как не известно какая из стратегий природы Ч или 2 будет прило- жена к объекту 1, то система управления должна производить смешивание (рандомизация) своих стратений S, и „с S случайным образом, для обеспечения равенства среднего значения выходной координаты (t )j заданному значению.
Вычисленное значение Р, m, через сумматор 14, блок 16 выделения минимума и блок 17 выделения максимума подается на управляющий вход генератора 15 случайного сигнала, что определяет вероятности Р и (l-P,-)j с которыми замыкаются ключи 4 и 5, т.е. устанавливаются вероятности появления стратегий S S системы управления.
Сигнал с выхода блока 14 памяти подается на управляющий вход генератора 15 случайного сигнала, в котором этот сигнал суммируется с сигналом от генератора 48 шума на.сумматоре 47. Суммарный сигнал с суммато- gg pa 47 цоцается на управляющий вход . ждущего мультивибратора 49 и изменя- .ет его постоянную времени случайным образом. На вход ждущего мультивибра25
30
40
45
gQ
36150210
тора 49 подается сигнал от. генерато--: ра 52 прямоугольных импульсов, который запускает ждущий мультивибратор 49, при этом длительность импульсов, генерируемых ждущим мультивибратором является случайной величиной. Выходт, ные сигналы с генератора 52 прямоугольных импульсов и ждущего мульти10 вибратора 49 подаются на вход эле- мента И 50 и на вход элемента И-НЕ51.
Если периоды колебаний генератора 52 прямоугольных импульсов и ждущего мультивибратора 49 не совпадают,-на
15 выходе элемента И 50 сигнал не появ
ляется, но при этом появляется сигнал на выходе элемента И-НЕ 51, ко- торьй через управляющий вход ключа 5 замыкает его.
Если периоды колебаний генератора 52 прямоугольных импульсов и ждущего мультивибратора 49 совпадают, их сигналы на вход элемента И 50 приходят одновременно и на его выходе появляется сигнал, который, поступив на управляющий вход ключа 4, замыкает его.
Этим обеспечивается адаптивность системы управления на изменяющиеся вероятностные характеристики возмущающего воздействия.
Однако в процессе работы могут изменяться также параметры объекта управления, что может приводить к появлению статической ошибки на выходе объекта 1, Для устранения этого влияния в системе управления используется коррекция вероятности по от- клонению выходной координаты объекта, которая позволяет устранить также и другие неконтролируемые возмущения.
Это осуществляется измерением текущего значения выходной координаты H t) датчиком 10 выходной координаты, сигнал которого сравнивают на элементе 11 сравнения с сигналом задат- чика 13.
Если управляющие воздействия стра- тегии системы управления S,, S и Р, определены точно, то статическая О1чибка на выходе системы управления равна нулю и в системе поддерживается равенство
и. - Mfu(t) 6 0. (6)
Сигнал рассогласования элемента 11 сравнения подается на регулятор 12, который в простейшем случае
11
представляет собой интегрирующее звено.
Если выполняются условия (6), то на выходе регулятор а 12 сигнал равен нулю, при нарушении этих условий на вькоде регулятора 12 появляется сигнал дР, который в сумматоре 14 алгебраически суммируется с сигналом, поступающим с выхода блока 3 управления.
Таким образом, на выходе сумматора 14 сигнал равен
13
Р. + ЛР
(7)
Этим изменяется задание генератору 15 случайного сигнала и на его выходах соответственно изменяются вероятности
р, р + iP; (8)
р, 1 - р,.
в блоке 3 -управления разделение сигнала возмущающего воздействия на классы производится так, что всегда
Jt) M{w,(t) г, () (9 Поэтому, если
. 5 и - M(u(t), (10)
где и - заданное значение выходной координаты объекта управления ; U(t) - текущее значение выходной
координаты объекта.
то , т.е. вероятность Р, замыкания ключа 4 убывает и соответственно вероятность Р замыкания ключа 5 возрастает. В силу (9).математическое ожидание сигнала на выходе сумматора 6 возрастает, что приводит к увеличению сигнала U с выхода статической модели 7 объекта и увеличению сигнала на входе регулятора 9 и, соответственно, к увеличению входной координаты S на входе объекта управления :
S S,P, + .
(11)
Если и, - M(u(t) О, то , т.е. вероятность замыкания ключа 4 возрастает, соответственно убывает вероятность Р замыкания ключа 5. Это приводит к снижению сигнала на выходе сумматора 6 и статической модели. 7 и объекта управления и соответствующему уменьшению входной координаты на входе объекта управления.
Этим обеспечиваются адаптивность системы управления на изменяющиеся вероятностные характеристики возму- щающего воздействия, а также на из150212
менение параметров объекта управления, что позволяет с более высокой точностью поддерживать среднее значение заданной координаты.
Для сохранения работоспособности системы при значительных колебаниях выходной координаты объекта управления введены блоки выделения минимума 16 и максимума 17 управляющего воздействия на входе генератора 15 случайного сигнала. Задатчиком 18 устанавливается максимально допустимая вероятность Р 1,0, а задатчиком 19 - минимально допустимая вероят10
15
ность Р О, это позволяет ограничить сигналы с сумматора 14 и обеспечить устойчивую работу генератора 15 случайного сигнала.
20
30
35
Техническим преимуществом данной адаптивной системы управления является более точное поддержание заданного значения выходной координаты 25 объекта управления. Это достигается тем, что после сравнения выходной координаты объекта управления с ее заданным значением корректируют вероятность стратегии управления по соответствующему классу. Отсутствие замкнутого контура управления по отклонению не создает условия для автоколебаний выходной координаты при больших величинах транспортного запаздывания и его изменениях в процессе функционирования объекта управления.
Формула изобретения
40
Адаптивная система управления, содержащая регулятор, датчик возмущающего воздействия, подключенный к входу блока управления, первый и второй
45 выходы которого через первьй и второй ключи подключены к входам первого сумматора, выход которого через статическую модель объекта управления соединен с первым входом первого
50 элемента сравнения, выход которого подключен к входу регулятора, выход объекта управления через датчик выходной координаты соединен с первым входом второго элемента сравнения,
55 выход которого через корректирующий регулятор подключен к первому входу второго сумматора, управляющий вход первого ключа связан с первым выходом управляемого генератора случайнокого сигнала, второй и третий выходы которого подключены к управляющим входам второго ключа, а вторые входы первого и второго элементов сравнения соединены с выходом задатчика выходной координаты, отличающаяся тем, что, с целью повышения точности системы, в нее введены блок вьщеления минимума управляющего воздействия с подключенным -к нему задатчиком и блок вьщеления максиму
ма управляющего воздействия с подключенным к нему задатчиком, причем выход второго сумматора через последовательно соединенные блоки выделения минимума и максимума управляющего воздействия подключен к входу генератора случайного сигнала, второй вход второго сумматора соединен с третьим выходом блока управления, а выход регулятора подключен к входу объекта управления.
/J
.



| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1984 |
|
SU1257607A1 |
| ПАРАМЕТРИЧЕСКИЙ СИНТЕЗАТОР | 1970 |
|
SU265218A1 |
| Система управления | 1981 |
|
SU996995A1 |
| Система синергетического стохастического управления технологическим процессом анаэробной очистки сточных вод | 2024 |
|
RU2835756C1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЁСТКОСТИ | 2003 |
|
RU2249244C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАСКАДНЫМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 1991 |
|
RU2012032C1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2003 |
|
RU2249243C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2015 |
|
RU2612340C1 |
| Устройство для моделирования стохастических объектов | 1984 |
|
SU1251096A1 |
| Устройство для активного демпфирования упругих колебаний элементов конструкции вращающегося объекта | 1983 |
|
SU1134927A1 |
Изобретение относится к самообучающимся системам автоматического управления и может быть использовано для управления объектом с транспор.т- ным запаздыванием и возмущающими воздействиями типа смесей, например, для автоматического управления процессами добычи и обогащения угля. Цель изобретения - повышение точности системы. Система содержит объект управления 1, датчик возмущающего воздействия 2, блок управления 3, два ключа 4 и 5, два сумматора 6, 14, статическую модель 7,-два элемента сравнения 8, 11, регулятор 9, датчик выходной координаты 10, корректирующий регулятор 12, задатчик выходной координаты 13, генератор случайного сигнала 15, блоки выделения минимума 16 и максимума 17 управляющего воздействия с эадатчиками 18, 19, 4 ил. (Л ел чЭ Фиг.
0.2 32 W,%
tpilz.
Составитель В.Пешков Редактор М.Бланар Техред Л.Сердюкова Корректор О.Кравцова
Заказ 6281/46Тираж 863Подписное
ВНШШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д . /5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Ороектная, 4
| Самонастраивающаяся система | 1980 |
|
SU983649A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Адаптивная система управления | 1984 |
|
SU1257607A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
