Изобретение относится к системам адаптивного управления биотехническим объектом с учетом систематических и случайных возмущений и может быть использована в регулировании систем очистки сточных вод на основе любых биореакторов и для управления другими технологическими процессами, характеризующихся нестационарностью основных переменных состояния, наличием неустойчивых предельных режимов, множеством непосредственно не измеряемых параметров, случайное и систематическое неконтролируемое воздействие на которые вносит неопределенность в предсказуемость основных характеристик технологического процесса.
Известна «Адаптивная система управления» (Патент РФ №2461037, МПК G05B 13/02, опубл. 10.09.2012, Бюл. №25), Адаптивная система управления, содержит схему сравнения, первый вход которой подключен к входу адаптивной системы управления, а выход через последовательно соединенные регулятор, сумматор к входу объекта управления, блок фазовой автоподстройки частоты, выход которого подключен к входу генератора гармонических колебаний, а также через вычислительный блок к второму входу регулятора, выход генератора гармонических колебаний подключен к первым входам первого и второго фильтров Фурье, первые и вторые выходы которых подключены к соответствующим входам вычислителя АЧХ, блок вычисления стартовой частоты, первый вход которого подключен через пятый ключ к выходу объекта регулирования, а выход через третий ключ к второму входу генератора гармонических колебаний, первый вход которого объединен с вторым входом вычислительного блока, а выход через первый ключ подключен к второму входу сумматора, генератор ступенчатого сигнала, выход которого подключен к второму входу блока вычисления стартовой частоты, а также через четвертый ключ к третьему входу сумматора, первый избирательный фильтр, вход которого подключен к выходу сумматора, а выход к второму входу первого фильтра Фурье, второй избирательный фильтр, вход которого подключен к выходу объекта регулирования, а выход к второму входу второго фильтра Фурье, выход объекта регулирования подключен через второй ключ к второму входу схемы сравнения.
Блок вычисления стартовой частоты содержит вычислитель разгонной характеристики, первый и второй входы которого подключены к первому и второму входам блока вычисления стартовой частоты, а выход через последовательно включенные сглаживающий фильтр, вычислитель комплексной частотной характеристики, вычислитель нормированного периода колебаний к выходу блока вычисления стартовой частоты.
Недостатком такой системы управления является подаваемый на вход объекта пробный гармонический сигнал для возбуждения ОУ, отклоняя его от номинального режима работы, что приводит к дополнительным энергопотерям на управление.
Известна «Адаптивная система управления» (Патент РФ № 2612340, МПК G05B13/04, опубл. 03.07.2017, Бюл. №7), содержащая объект управления, соединенный с регулятором первым входом, воздействующие на объект внешние возмущения, связанный с сумматором второй выход объекта, уставку, подаваемую на второй вход ОУ, выход сумматора, подаваемый на регулятор и идентификатор, выход идентификатора, подключаемый к дигратору, выход которого подключен к регулятору, устраняет недостаток отклонения от номинального режима работы, однако применение этих двух выше указанных моделей к биотехническому объекту управления с учетом наличия неустойчивых предельных режимов, неопределенность наступления которых неизбежно возрастает в условиях стохастичности определенных параметров, непосредственно не представляется возможным в силу особенностей ПИД-регулирования.
Известная «Система адаптивного управления нестационарным объектом» (Патент РФ № 80969, МПК G05B 13/00, опубл. 27.02.2009, бюл. №6), содержащая последовательно соединенные задающее устройство, устройство сравнения, регулятор, объект управления и блок наблюдателя состояния, связанный с блоком вычисления функции Гамильтона, который подключен к блоку показателей качества управления, блоку эталонной модели и блоку вычислений коэффициентов перенастройки, выход которого соединен с регулятором, а вход соединен с блоком эталонной модели, выход регулятора подключен к входу широтно-импульсного модулятора, выход которого соединен с блоком эталонной модели, блоком вычисления функции Гамильтона и первым выходом импульсного усилителя, выход которого подключен к объекту управления, второй вход импульсного усилителя подключен к выходу анализатора начального состояния, первый вход которого соединен с выходом блока наблюдателя состояния, второй вход анализатора начального состояния соединен с выходом блока эталонной модели, подключенного к объединенным входам блока вычисления функции Гамильтона и блока вычислений коэффициентов перенастройки, третий вход анализатора начального состояния соединен с входом блока эталонной модели и выходом блока задания начального состояния, также непосредственно неприменима к биотехническим объектам со стохастической неопределенностью вследствие возрастания неопределенности в перерегулировании и длительности переходных процессов отсутствия, что приводит к неопределенности в корректной перенастройке параметров регулятора в окрестности неустойчивых состояний, свойственных рассматриваемым системам.
Общим недостатком описанных выше систем является нарушение стабильности системы управления при вхождении объекта управления в режим потенциальной неустойчивости, предвестники которого обнаружить для биохимических процессов затруднительно.
Прототипом заявляемого изобретения является нелинейная модель прогностического контроллера для анаэробного сбраживания [Garcia-Gen, S., Santos, L. O., Wouwer A. V., 2022. Application of a Nonlinear Model Predictive Controller to the Anaerobic Digestion of Readily Biodegradable Wastes. IFAC PapersOnLine 55-7, pp. 909-914. https://doi.org/10.1016/j.ifacol.2022.07.560], целью которой является достижение запланированной выработки метана, следуя эталонной траектории и содержащей последовательно соединенные блоки задающего устройства, устройства сравнения, оптимизации, объекта управления, эталонной модели объекта управления, при этом на вход блока оптимизации поступают данные критерия качества системы и ограничения на параметры объекта управления.
Используя существующую динамическую модель анаэробного сбраживания контроллер оптимизирует рабочие условия за счет выбора такого управления набором технологических переменных, чтобы расход метана соответствовал желаемой траектории. Контроллер, совмещенный на схеме с блоком оптимизации, работает в рамках последовательного подхода: траектория установки оценивается на горизонте прогнозирования с помощью упрощенной динамической модели процесса, которая включает только две биологические реакции: ацидогенез и метаногенез; затем прогнозы модели оптимизируются с помощью метода последовательного квадратичного программирования для соответствия желаемой траектории по биогазу.
Недостатками прототипа являются, во-первых, отсутствие возможности применения системы управления для конкретного объекта при изменении требований к целевой системе, так как имеется ограничение в фиксации цели управления в виде направленного изменения отдельного показателя (G) - биогаза; во-вторых, ожидаемое снижение качества управления за счет неизбежных на практике случайных и систематических возмущений, компенсация которых не учитывается в рассматриваемой модели ОУ, а также отсутствие возможности и, соответственно, рекомендаций динамической перенастройки регулятора с целью стабилизации ОУ при изменении целевых установок.
Задачей заявляемого изобретения является обеспечение энергосберегающего стабилизирующего синергетического управления нелинейной многомерной системой анаэробной очистки сточных вод, подверженной неконтролируемым систематическим и стохастическим возмущениям.
Техническим результатом заявляемого изобретения является повышение эффективности безотказного функционирования биотехнической системы за счет энергосберегающего синергетического регулятора, для которого предусмотрена автоматизация корректной динамической настройки параметров управления, обеспечивающего целенаправленную самоорганизацию объекта управления относительно различных целевых установок.
Технический результат достигается тем, что система синергетического стохастического управления технологическим процессом анаэробной очистки сточных вод содержащая последовательно соединенные задающее устройство, устройство сравнения и блок оптимизации, а также объект управления, выход которого соединен с первым входом блока модели объекта управления, а второй и третий входы блока оптимизации соединены с выходами блока задания ограничений и ретроспективных данных и блока задания критерия качества опорного управления соответственно, при этом второй вход объекта управления является входом возмущающего воздействия, второй выход блока модели объекта управления соединен со вторым входом устройства сравнения, а второй выход блока оптимизации соединен со вторым входом блока модели объекта управления дополнительно содержит регулятор системы очистки сточных вод, вход которого соединен с выходом блока оптимизации, а первый выход - с первым входом объекта управления, блок принятия решений, первый вход которого соединен с выходом объекта управления, второй вход - со вторым выходом регулятора, а третий вход - с первым выходом блоком модели объекта управления, а первый и второй выходы блока принятия решений соединены с третьим входом объекта управления и входом блока коррекции цели управления, выход которого соединен с четвертым входом бока оптимизации, блок динамической оптимизации критериальной функции, вход которого соединен с выходом объекта управления, блок прогнозирования и перенастройки параметров опорного регулятора, содержащий последовательно соединенные блок задержки, блок прогнозирования, блок построения алгоритмической композиции и блок построения оценки состояния и прогноза, а также блок критериев оптимизации алгоритмической композиции, выход которого соединен со вторым входом блока построения алгоритмической композиции, при этом вход блока задержки является первым входом блока прогнозирования и перенастройки параметров опорного регулятора и соединен с выходом объекта управления, второй вход блока построения оценки состояния и прогноза является вторым входом блока прогнозирования и перенастройки параметров опорного регулятора и соединен с выходом блока динамической оптимизации критериальной функции, а первый и второй выходы блока построения оценки состояния и прогноза являются первым и вторым выходом блока прогнозирования и перенастройки параметров опорного регулятора и соединены с пятым входом блока оптимизации и входом задающего устройства соответственно.
Технический результат достигается за счет построения прогноза сигнала на основе динамически изменяющейся корректной (безошибочной для фиксированной модели объекта управления) алгоритмической композиции, обеспечивающей гибкую стратегию оптимизации критериальной функции, возможности автоматического выбора не только режима и типа текущего управления в зависимости от текущего состояния, но и оперативной перенастройки параметров выбранного типа регулирования, а также энергосберегающими свойствами используемого в устройстве синергетического стохастического регулятора.
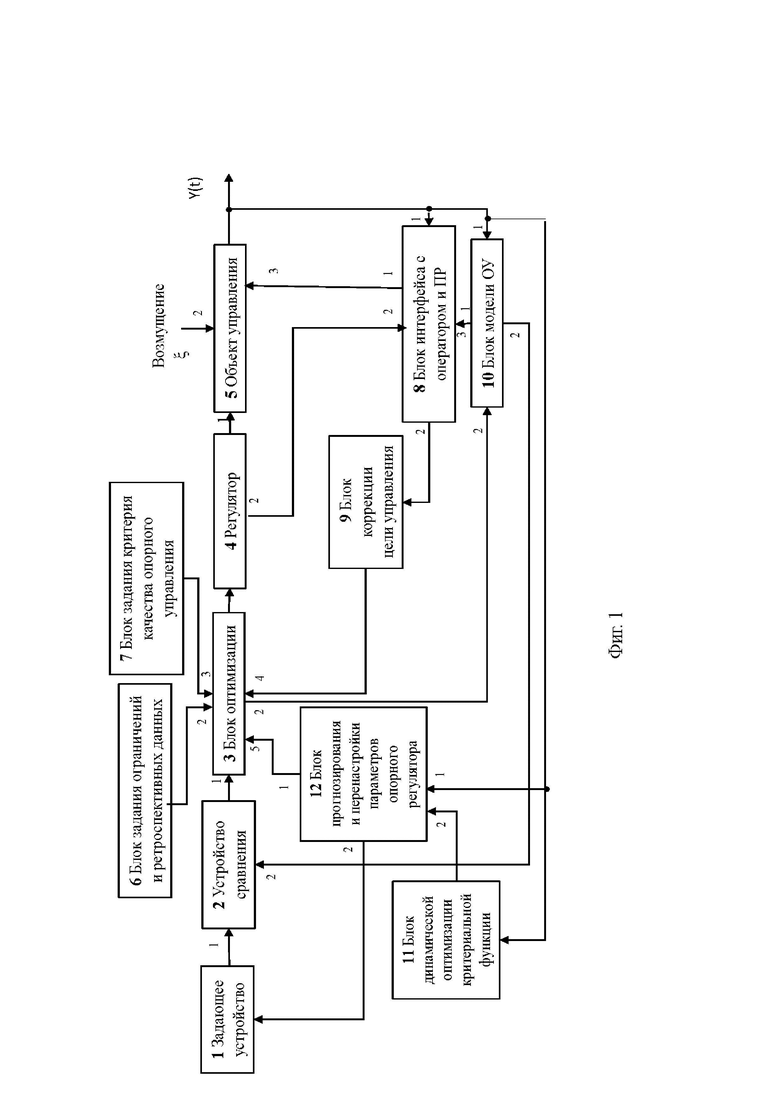
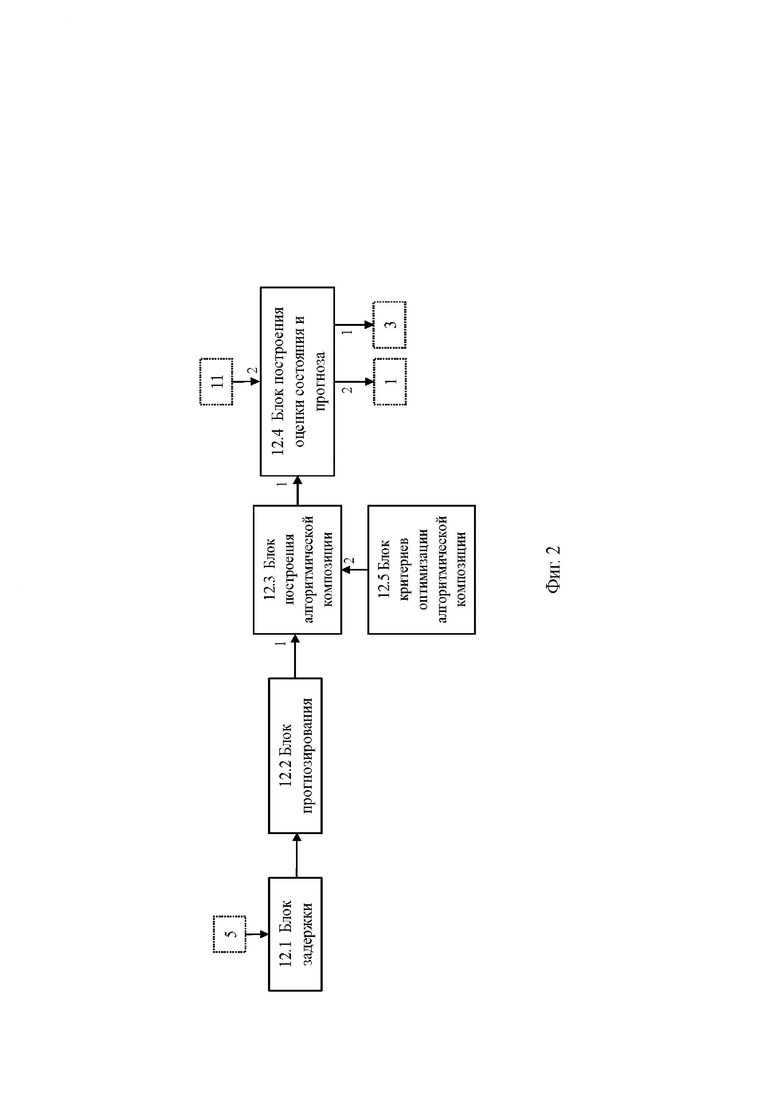
Изобретение поясняется чертежами, где на фиг.1 - функциональная схема системы синергетического управления стохастическим объектом анаэробной очистки сточных вод, а на фиг. 2 - детализация «блока прогнозирования и перенастройки параметров опорного регулятора+» и обозначены следующие блоки:
1 - задающее устройство
2 - устройство сравнения
3 - блок оптимизации
4 - регулятор системы очистки сточных вод
5 - объект управления
6 - блок задания ограничений и ретроспективных данных
7 - блок задания критерия качества опорного управления
8 – блок принятия решений
9 - блок коррекции цели управления
10 - блок модели объекта управления
11 - блок динамической оптимизации критериальной функции
12 - блок прогнозирования и перенастройки параметров опорного регулятора
12.1 - блок задержки
12.2 - блок прогнозирования
12.3 - блок построения алгоритмической композиции
12.4 - блок построения оценки состояния и прогноза
12.5 - блок критериев оптимизации алгоритмической композиции
Система синергетического стохастического управления технологическим процессом анаэробной очистки сточных вод содержит последовательно соединенные задающее устройство 1, устройство сравнения 2, блок оптимизации 3, регулятор системы очистки сточных вод 4 и объект управления 5, а также блок задания ограничений и ретроспективных данных 6 и блок задания критерия качества опорного управления 7, выходы которых соединены со вторым и третьем входами блока оптимизации 3, последовательно соединенные блок принятия решений 8 и блок коррекции цели управления 9, выход которого соединен с четвертым входом блока оптимизации 3, при этом второй вход 8 соединен со вторым выходом регулятора системы очистки сточных вод 4, первый вход блок принятия решений 8 соединен с выходом объекта управления 5, а первый выход - с третьим входом объекта управления 5, система также содержит блок модели объекта управления 10, первый выход которого соединен с третьим входом блока принятия решений 8, первый вход - с выходом объекта управления 5, второй вход - со вторым выходом блока оптимизации 3, а второй выход - со вторым входом устройства сравнения 2, блок динамической оптимизации критериальной функции 11, вход которого соединен с выходом объекта управления, а также блок прогнозирования и перенастройки параметров опорного регулятора 12, первый вход которого соединен с выходом объекта управления 5, второй вход - с выходом блока динамической оптимизации критериальной функции 11, первый выход - с пятым входом блока оптимизации, а второй выход - со входом задающего устройства 1, при этом блок прогнозирования и перенастройки параметров опорного регулятора 12 содержит последовательно соединенные блок задержки 12.1, блок прогнозирования 12.2, блок построения алгоритмической композиции 12.3 и блок построения оценки состояния и прогноза 12.4, а также блок критериев оптимизации алгоритмической композиции 12.5, выход которого соединен со вторым входом блока построения алгоритмической композиции 12.3, при этом вход блока задержки 12.1 является первым входом блока прогнозирования и перенастройки параметров опорного регулятора 12, второй вход блока построения оценки состояния и прогноза 12.4 является вторым входом блока прогнозирования и перенастройки параметров опорного регулятора 12, а первый и второй выходы блока построения оценки состояния и прогноза 12.4 являются первым и вторым выходами блока прогнозирования и перенастройки параметров опорного регулятора 12, при этом второй вход объекта управления 5 является входом возмущающего воздействия.
Применение заявляемого изобретения должно сопровождаться выполнением следующих условий.
1. Исходная математическая модель объекта управления, как и модель эталона объекта прототипа, имеет общее описание в виде системы нелинейных однородных дифференциальных уравнений, все решения которой ограничены:
 (1)
(1)
где  - векторы состояния, управления, ограниченного неконтролируемого возмущения, соответственно;
- векторы состояния, управления, ограниченного неконтролируемого возмущения, соответственно;  - нелинейная векторная функция состояния.
- нелинейная векторная функция состояния.
Принципиальным отличием от ранее рассмотренных формальных моделей является включение в описание (1) функции времени  как неконтролируемой функции возмущения по каналу управления, выражающей содержательно и неполноту модели объекта управления и возможные неточности построения управляющего воздействия при возникновении нестабильных быстро протекающих режимов.
как неконтролируемой функции возмущения по каналу управления, выражающей содержательно и неполноту модели объекта управления и возможные неточности построения управляющего воздействия при возникновении нестабильных быстро протекающих режимов.
При этом важно для корректности аналитического вывода закона управления, обеспечивающего заданные свойства целевой системы, чтобы неизбежная на практике дискретизация модели (1) могла быть представлена в виде стохастической системы разностных уравнений:
 (2)
(2)
где  ,
,  ,
,  векторы состояний дискретной модели технологического процесса, нелинейной векторной функции описания динамики изменения состояний ОУ, и управления, соответственно, может содержать случайные неконтролируемые возмущения
векторы состояний дискретной модели технологического процесса, нелинейной векторной функции описания динамики изменения состояний ОУ, и управления, соответственно, может содержать случайные неконтролируемые возмущения  в виде некоррелированных функций с нулевым средним и ограниченной дисперсией:
в виде некоррелированных функций с нулевым средним и ограниченной дисперсией: 
 .
.
2. Целевые траектории объекта управления, в отличие от ранее рассмотренных моделей, не задаются заранее, а выбираются самим объектом на принципах самоорганизации [2, 6] в зависимости от цели, заданной в виде условия  , выражающей технологические желаемые требования к предельной целевой системе, например, перечисленные в [4, 5].
, выражающей технологические желаемые требования к предельной целевой системе, например, перечисленные в [4, 5].
3. Функционал качества управления и уравнение экстремалей, согласно СТУ, для отдельной реализации процесса имеет вид [2]:
 (3)
(3)
Примеры подробного вывода опорных (на основе СТУ) регуляторов для двух моделей анаэробной биоочистки приведены в [4, 5], где указана методология и реализующий ее алгоритм компенсации неконтролируемых возмущений.
Пример. Описанию (1), в частности, подчиняются модели анаэробных биореакторов со взвешенно-седиментированной биомассой (4) и с прикрепленной на неподвижных плоскостных носителях биомассой, являющиеся следствием обобщенной модели анаэробного биореактора [7], как сложного биотехнического объекта:
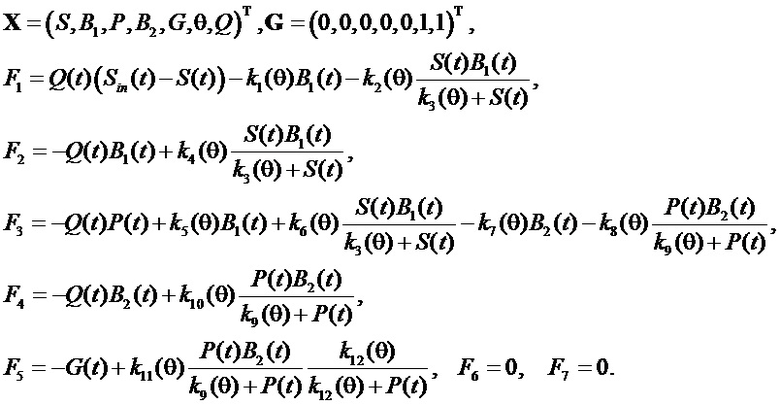 (4)
(4)
В (4) X - вектор состояний (концентрации исходного субстрата S, кислотогенной биомассы B1, промежуточных продуктов брожения P, метаногенной биомассы B2, побочного продукта - метана G, рабочая температура в биореакторе θ, скорость разбавления среды в биореакторе Q);  - кинетические параметры процесса с известным законом изменения. Тогда u, ζ ∈R2 - искомый закон регулирования по температуре и по концентрации входного потока и неизвестная функция времени, соответственно.
- кинетические параметры процесса с известным законом изменения. Тогда u, ζ ∈R2 - искомый закон регулирования по температуре и по концентрации входного потока и неизвестная функция времени, соответственно.
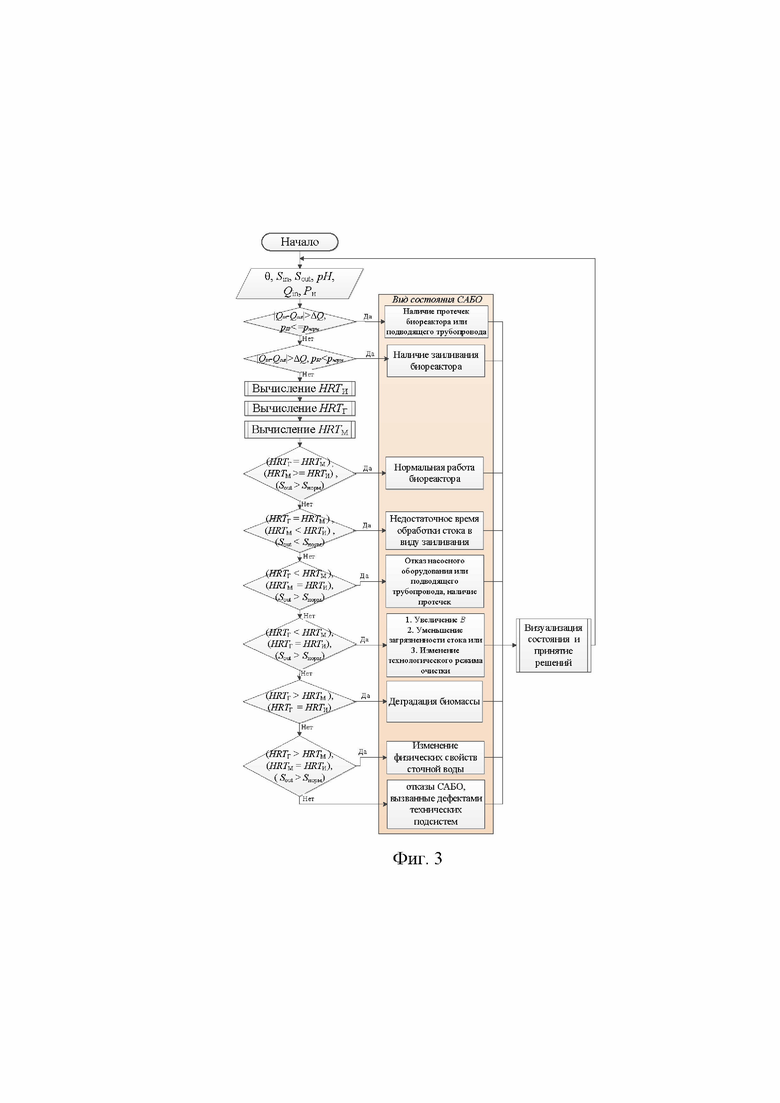
Работа заявляемой системы синергетического стохастического управления технологическим процессом анаэробной очистки сточных вод осуществляется следующим образом (Фиг.3, Фиг.4).
Задающее устройство 1 формирует входное воздействие, поступающее на устройство сравнения 3 для вычитания сигнала обратной связи с выхода блока модели объекта управления 10. Ошибка регулирования с выхода устройства сравнения 2 поступает в блок оптимизации 3, где на основе информации, поступающей с блоков задания ограничений и ретроспективных данных 6, критерия качества опорного управления 7, прогнозирования и перенастройки параметров опорного регулятора системы очистки сточных вод 4, в блоке коррекции цели управления 9 формируется закон опорного регулирования с привлечением аппарата СТУ, реализованного формулами (1)-(4) в зависимости от используемых конструктивных, физических и биохимических параметров [1, 3-6]. Далее сформированный сигнал реализуется исполнительными механизмами регулятора системы очистки сточных вод 4 и далее воздействует на объект управления 5, согласно выбранной в блоке коррекции цели управления 9 стратегии управления, реализующих различные заданные на текущий момент желаемые свойства целевой системы).
Важно, что при изменении требований к целевой системе, выраженные условием , закон управления как функция переменных состояния и макропеременных ψ формируется автоматически с последующей оптимизацией параметров регулирования в блоке прогнозирования и перенастройки параметров опорного регулятора 12.
На основе значений переменных с выхода объекта управления 5 на основе данных из блока оптимизации 3 и информации о состоянии регулятора системы очистки сточных вод 4, параметров в блоке модели объекта управления 10 и в блоке принятия решений 8 принимается решение о коррекции цели управления с целью поддержания объекта управления в стабильном состоянии с заданными свойствами, а также осуществляется автоматизированный анализ и визуализация текущей ситуации с основой на данные о значениях текущего состояния, поступающие от объекта управления 5 и состояния регулятора системы очистки сточных вод 4, а также значений в блоке модели объекта управления 10. На фиг. 3 приведен фрагмент алгоритма расчета для получения части информации в блоке принятия решений 8 (HRTИ, HRTГ, HRTМ - время гидравлического пребывания стока на очистке, оцененное по имитации в блоке модели объекта управления 10, гидравлического расчета и численного решения по математической модели, соответственно).
Требования к качеству регулирования процессов в объекте управления 5, назначаемые, во-первых, в блоке задания критерия качества опорного управления 7, обеспечивают: а) достижимость целевого макросостояния, б) минимальность разброса значений в окрестности траектории стабилизируемой макропеременной  (формулы (3), (4)); во-вторых, в блоке динамической оптимизации критериальной функции 11, численно апробированной в [1], на основе которой в блоке прогнозирования и перенастройки параметров опорного регулятора 12 осуществляется определение прогнозного значения состояния, информация о котором поступает в задающего устройство 1 и блок оптимизации 3.
(формулы (3), (4)); во-вторых, в блоке динамической оптимизации критериальной функции 11, численно апробированной в [1], на основе которой в блоке прогнозирования и перенастройки параметров опорного регулятора 12 осуществляется определение прогнозного значения состояния, информация о котором поступает в задающего устройство 1 и блок оптимизации 3.
В блоках прогнозирования и построения алгоритмической композиции 12.3 на основе данных в блоке критериев оптимизации алгоритмической композиции 12.5 прогнозные значения макросостояния .
В блоке прогнозирования 12.2 осуществляется получение прогнозов по нескольким моделям на основе предыстории процесса, накопленной в блоке задержки 12.1, правила конструирования ансамблевого алгоритма, реализованного в блоке построения алгоритмической композиции 12.3 согласно данным из блока критериев оптимизации алгоритмической композиции 12.5. Полученный результат является основой вычислений в блоке построения оценки состояния и прогноза (12.4) итоговых оценок динамического состояния объекта управления и прогнозных значений макросостояния по формуле [7]:
 , (5)
, (5)
где  - значение прогноза в момент времени t по глубине ретроспективы Т, полученной в момент t>0;
- значение прогноза в момент времени t по глубине ретроспективы Т, полученной в момент t>0;  - обновляемые во времени весовые коэффициенты непосредственно перед вычислением ответа
- обновляемые во времени весовые коэффициенты непосредственно перед вычислением ответа  ; b - число базовых алгоритмов прогнозирования;
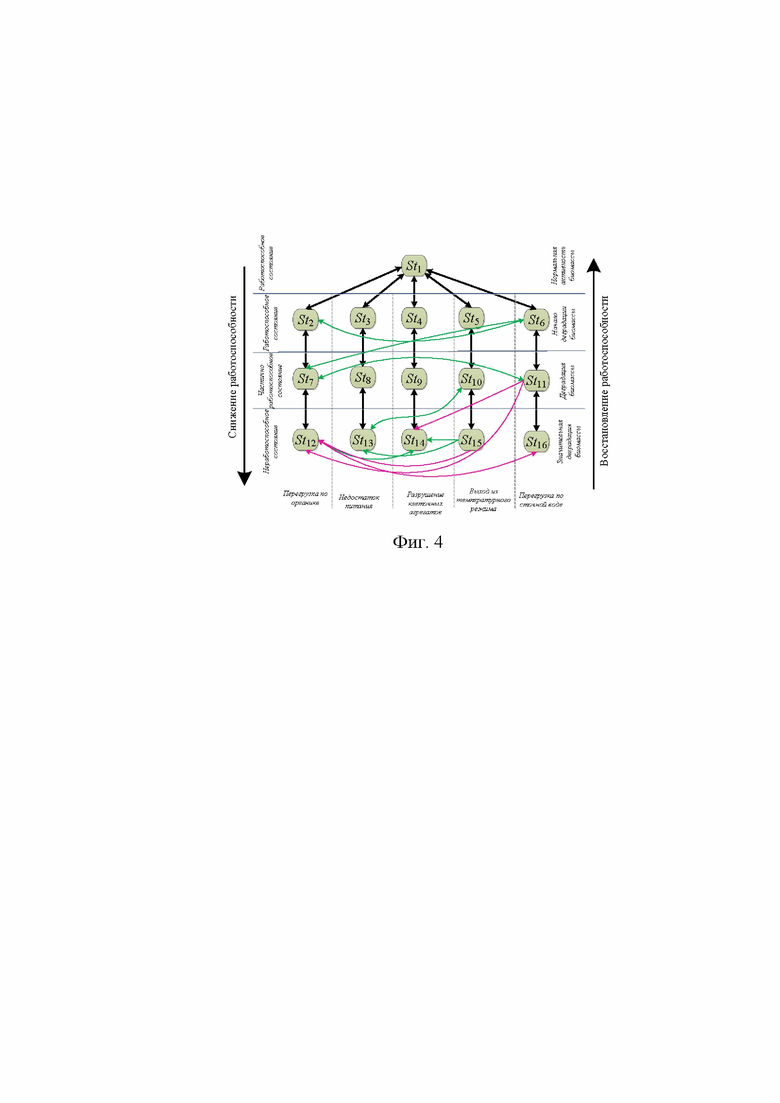
; b - число базовых алгоритмов прогнозирования;  - номер «наилучшей» модели регулирования, выбираемой по критерию средней ошибки прогноза на обучающей выборке (Фиг. 4)
- номер «наилучшей» модели регулирования, выбираемой по критерию средней ошибки прогноза на обучающей выборке (Фиг. 4)

где  - оценка макропеременной из множества целевых макропеременных, экспертно определенных и задающих окрестность целевого многообразия;
- оценка макропеременной из множества целевых макропеременных, экспертно определенных и задающих окрестность целевого многообразия;  - оценка расстояния между элементами-аргументами, полученные на обучении (Фиг. 4);
- оценка расстояния между элементами-аргументами, полученные на обучении (Фиг. 4);  - параметр алгоритмической композиции, определяющий объем актуальной информации (предыстории), учитываемой при принятии решения по правилу (5).
- параметр алгоритмической композиции, определяющий объем актуальной информации (предыстории), учитываемой при принятии решения по правилу (5).
Переходы между некоторыми практически реальными состояниями (Фиг. 4) и вероятности перехода (черное, сиреневое, зеленое начертания сопоставлены диапазонам вероятностей 0.05-0.15, 0.02-0.05, меньших 0.02, соответственно [7]) получены на обучении на имитационной модели одной из систем.
Сопоставление целевых характеристик заявляемого изобретения и прототипа позволяет сделать вывод о том, что заявляемая система синергетического стохастического управления технологическим процессом анаэробной очистки сточных вод обеспечивает достаточную точность прогноза типа состояния биотехнического объекта (100% на обучении, 98,9% на валидации), а универсальные свойства робастной системы управления, основанной на наборе опорных регуляторов, приводят к улучшению стабилизирующих и энергоэффективных свойств (15%), характерных для систем синергетического подхода к конструированию регулирования.
Источники информации
Kolesnikova S. I., Fomenkova A. A. Dynamic strategies for control over the quality of monitoring of a complex bioengineering object. Информационно-управляющие системы, 2023, № 2, с. 51-60.
Колесников А.А. Синергетические методы управления сложными системами: теория системного синтеза. М.: Либроком, 2012.
Свид-во о гос. регистрации программы для ЭВМ №2021669208. Программный модуль для идентификации видов технического состояния анаэробного биореактора. А.А. Фоменкова. № 2021668776, заявл.25.11.2021.
Фоменкова А.А., Ключарев А.А., Колесникова С.И. Синтез системы управления, мониторинга и оценивания состояния анаэробного биореактора. Информационные и математические технологии в науке и управлении. 2022 № 1 (25). С.21-33. DOI:10.38028/ESI.2022.25.1.002.
Колесникова C.И. Применение принципов инвариантности для моделирования биоинженерных объектов управления. Информационные и математические технологии в науке и управлении. 2023 № 3 (31). С.103-116. DOI:10.25729/ESI.2023.31.3.010
Фоменкова А.А., Ключарёв А.А. Математическая модель анаэробного биореактора с закрепленной биомассой как объекта управления // Информационно управляющие системы. 2019. №2. С.44-51.
Фоменкова А.А. Модельно-алгоритмическое обеспечение мониторинга состояния систем анаэробной биологической очистки сточных вод. Дисс. на соискание уч. ст. кандидата технических наук / Федеральное государственное бюджетное учреждение науки "Санкт-Петербургский федеральный исследовательский центр Российской академии наук". 2022, с.227.
Изобретение относится к системам адаптивного управления биотехническим объектом с учетом систематических и случайных возмущений и может быть использовано в регулировании систем очистки сточных вод на основе любых биореакторов. Технический результат заключается в повышении эффективности безотказного функционирования биотехнической системы. Технический результат достигается за счет построения прогноза сигнала на основе динамически изменяющейся корректной безошибочной для фиксированной модели объекта управления алгоритмической композиции, обеспечивающей гибкую стратегию оптимизации критериальной функции, возможности автоматического выбора не только режима и типа текущего управления в зависимости от текущего состояния, но и оперативной перенастройки параметров выбранного типа регулирования, а также энергосберегающими свойствами используемого в устройстве синергетического стохастического регулятора. 4 ил.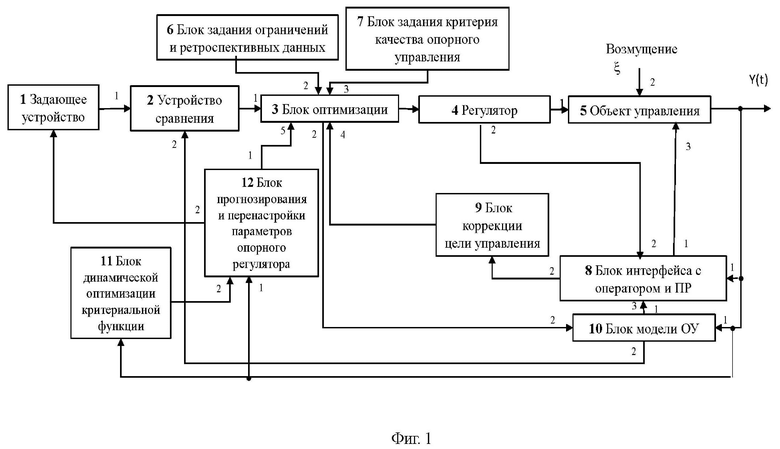
Система синергетического стохастического управления технологическим процессом анаэробной очистки сточных вод содержащая последовательно соединенные задающее устройство, устройство сравнения и блок оптимизации, а также объект управления, выход которого соединен с первым входом блока модели объекта управления, а второй и третий входы блока оптимизации соединены с выходами блока задания ограничений и ретроспективных данных и блока задания критерия качества опорного управления соответственно, при этом второй вход объекта управления является входом возмущающего воздействия, второй выход блока модели объекта управления соединен со вторым входом устройства сравнения, а второй выход блока оптимизации соединен со вторым входом блока модели объекта управления, отличающаяся тем, что система дополнительно содержит регулятор системы очистки сточных вод, вход которого соединен с выходом блока оптимизации, а первый выход – с первым входом объекта управления, блок принятия решений, первый вход которого соединен с выходом объекта управления, второй вход – со вторым выходом регулятора, а третий вход – с первым выходом блоком модели объекта управления, а первый и второй выходы блока принятия решений соединены с третьим входом объекта управления и входом блока коррекции цели управления, выход которого соединен с четвертым входом бока оптимизации, блок динамической оптимизации критериальной функции, вход которого соединен с выходом объекта управления, блок прогнозирования и перенастройки параметров опорного регулятора, содержащий последовательно соединенные блок задержки, блок прогнозирования, блок построения алгоритмической композиции и блок построения оценки состояния и прогноза, а также блок критериев оптимизации алгоритмической композиции, выход которого соединен со вторым входом блока построения алгоритмической композиции, при этом вход блока задержки является первым входом блока прогнозирования и перенастройки параметров опорного регулятора и соединен с выходом объекта управления, второй вход блока построения оценки состояния и прогноза является вторым входом блока прогнозирования и перенастройки параметров опорного регулятора и соединен с выходом блока динамической оптимизации критериальной функции, а первый и второй выходы блока построения оценки состояния и прогноза являются первым и вторым выходом блока прогнозирования и перенастройки параметров опорного регулятора и соединены с пятым входом блока оптимизации и входом задающего устройства соответственно.
| Способ разогрева ванн для электролитического получения алюминия | 1940 |
|
SU59278A1 |
| Приемный барабан чесальной машины | 1947 |
|
SU80970A1 |
| РЕАКТОР И СПОСОБ АНАЭРОБНОЙ ОЧИСТКИ СТОЧНЫХ ВОД | 2004 |
|
RU2377191C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2011 |
|
RU2461037C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2015 |
|
RU2612340C1 |
| Устройство для взвешивания сыпучих материалов | 1947 |
|
SU80969A1 |

