Изобретение относится к электротехнике, к управлению электрическими машинами, и может быть использовано в дискретном электроприводе, включающем двигатель с волновым ротором.
Цель изобретения - расширение функциональных возможностей путем контроля отказов электропривода с волновым ротором.
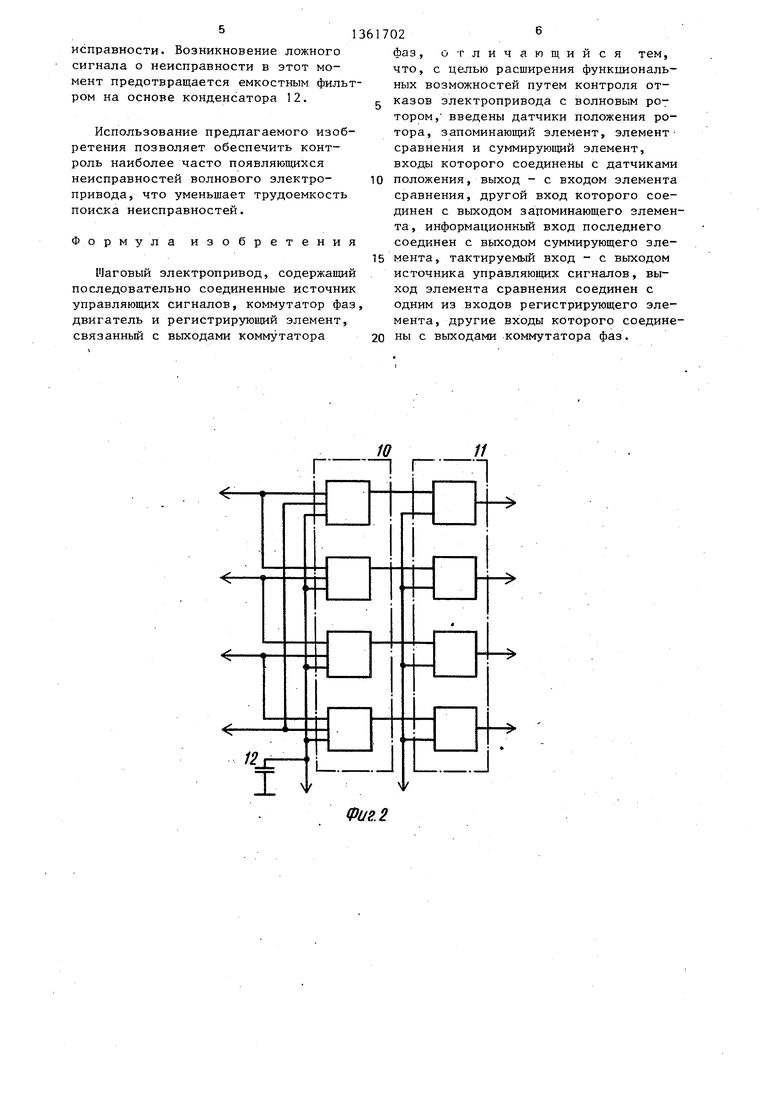
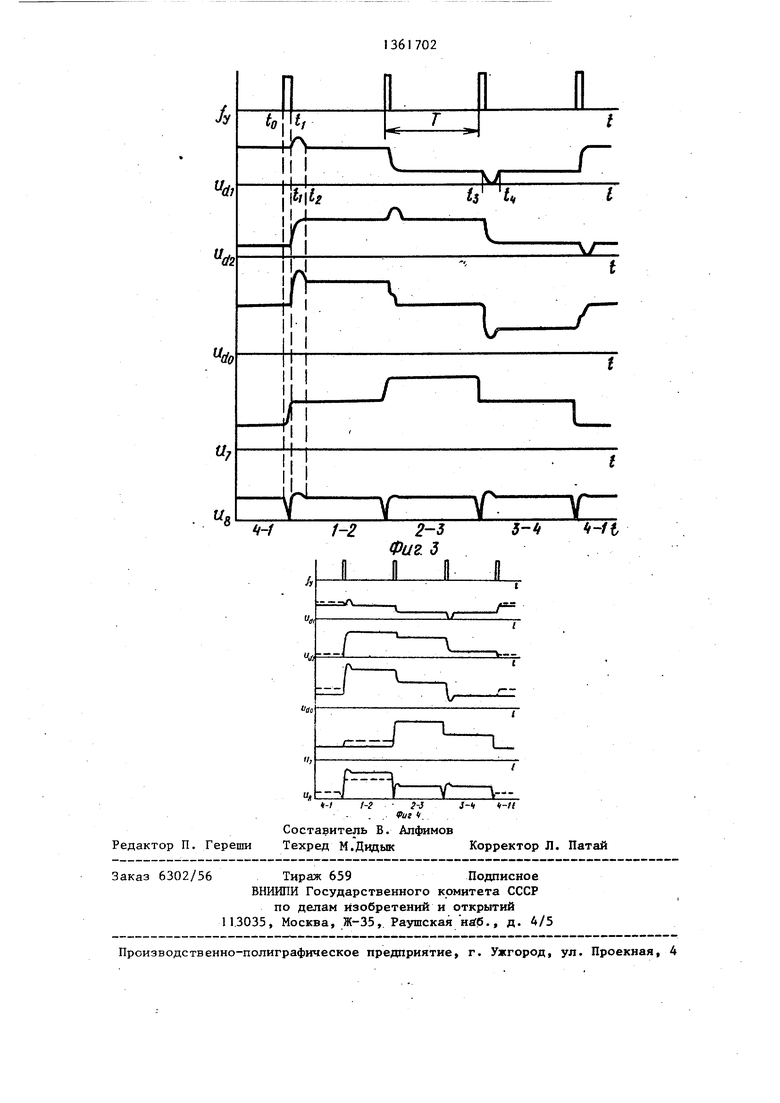
На фиг. 1 приведена функпиональ- ная схема электропривода; на фиг.2- схема регистрирующего элемента; на фиг. 3 - циклограмма напряжений на элементах привода при нормальной работе; на фиг. 4 - то же, при неисправности привода.
Устройство содержит источник 1 управляющих сигналов, выход которого соединен с входом коммутатора 2 фаз, выходы которого соединены с фазами волнового электродвигателя (ВЭД) 3. На корпусе ВЕД 3 установлены датчики 4 и 5, выходы которых соединены с - входом суммирующего элемента 6. Вы- , ход суммирующего элемента 6 соединен с одним из входов запоминающего элемента 7, другой тактируемый вход которого соединен с выходом управляющих -импульсов f 1. Выход суммирующего элемента 6 соединен с одним из входов элемента 8 сравнения, другой вхо которого соединен с выходом запоминающего элемента 7.
Выход элемента 8 сравнения соединен с одним из входов регистрирующего элемента 9, другие входы которого соединены с выходами коммутатора 2 фаз. Датчики расположены на корпусе ВЭД и сдвинуты относительно друг друга на угол, близкий к 45 , для цилиндрических машин и на угол, близкий к 90° , для торцовых машин. Регистрирующий элемент 9 может содержать по числу фаз двигателя цепи из последовательно соединенных дещифра- тора 10 и триггера 11, а. также конденсатор 12, соединенный с первыми входами дешифраторов 10 и выходом элемента 8 сравнения. Вторые входы дешифраторов 10 соединены с фазой ВЭД, а третьи - с предыдущей фазой ВЭД. Вторые входы триггеров 11 подключены к цепи сброса.
Электропривод работает следующим образом.
Источник 1 управляющих сигналов вырабатывает короткие импульсы, изменяющие состояние коммутатора 2
5
0
фаз и вызывающие вращение ротора ВЭД 3. На вход суммирующего элемента 6 поступают электрические сигналы напряжения с выходов индукционных датчиков 4 и 5. С выхода суммирующего элемента 6 суммарное электрическое напряжение поступает на вход элемента 8 сравнения, где выполняется операция Вычитание над электрическим напряжением, поступающим с выхода суммирующего элемента 6, и электрическим напряжением, поступившим с выхода запоминающего элемента 7, которое получено путем запоминания напряжения с выхода элемента 6 в такте коммутации, предшествующем текущему. Разрешение на запоминание напряжения элемент 7 получает от источника 1 управляющих сигналов с частотой следования fy в.момент переключения фаз ВЭД.
Таким образом, на выходе элемента 8 сравнения присутствует разность 5 суммарных электрических напряжений датчиков положения ротора ВЭД, взятых при положении ротора ВЭД, предшествующем отработке последнего шага, и при текущем его значении.
В случае исправно работающего ВЭД электрическое напряжение на выходе элемента 8 сравнения близко к некоторому постоянному значению
(фиг. 3, Ug).
в случае неисправности типа обрыв фазы или короткое замыкание фазы на выходе элемента 8 сравнения (фиг. 4) электрическое напряжение близко к нулевому значению в некото- Q ром такте коммутации, характеризующем проявление данной неисправности (угол перемещения при отработке одного шага отличен от заданного).
В случае неисправности типа вит- ковое замыкание фазы на выходе элемента 8 сравнения электрическое напряжение отлично от некоторого постоянного значения, которое сохранялось при исправном состоянии фаз ВЭД. В-случае механического разрушения гибкого элемента ротора ВЭД (распушение) на выходе элемента 8 сравнения электрическое напряжение равно нулю.
Таким образом, напряжение на выходе элемента 8 сравнения несет информацию об исправном либо неисправном состоянии электропривода. Для классификации неисправности ВЭД (указа0
5
0
J
ние конкретной фазы, в которой появилась неисправность типа обрыв фазы или короткое замыкание фазы привод содержит регистрирующий элемент 9, на один из входов которого поступает электрический сигнал с выхода элемента 8 сравнения, а остальные входы регистрирующего элемента соединены с выходами ком гутатора фаз ВЭД.
При возникновении неисправности в зависимости от номера фазы, вышед- щей из строя, на выходе соответствующего элемента дешифратора 10 появляется сигнал, который переводит соответствую ций триггер в противоположное устойчивое состояние. Сигнал с выхода триггера может быть использован как управляющий сигнал световой индикацией или звуковой сигнализацией или сигнал неисправности, поступающий на управляющую ЭВМ, а также на любое другое устройство. Конденсатор 12 включенный между общей шиной источника питания и вьгко- дом элемента сравнения, сглаживает сигнал записи, возникающий в момент переключения фаз двигателя на выходе элемента сравнения.
Неисправность типа короткое замыкание фазы определяется в тех тактах коммутации фаз , при которых проявляется неисправность типа обрыв фазы у фаз, ориентированных перпендикулярно к искомым и указанных в таблице.
На фиг. 3 представлена временная диаграмма сигналов, иллюстрирующая работу устройства на низкой частоте управляющих импульсов, где Uj , сигналы, снимаемые с выходов датчиков положения ВЭД; Uj - сигнал-, снимаемый с выхода суммирующего эле10
617024
мента 6, равный сумме сигналол, снимаемых с выходов датчиков, Uj Uj + Uj ; U, - сигнал, отымаемый с выхода запоминающего элемента 7, который получен путем записи сигнала Uj в предыдущем такте коммутации фаз; Ug - сигнал, снимаемый с выхода элемента 8 сравнения, равный разности и и иJ по абсолютной величине.
По переднему фронту управляющеио сигнала (время t, - начало такта коммутации 1-2) происходит запись (выборка) запоминавшим элементом 7 на- 15 .пряжё ния Uj , присутствующего на выходе суммирующего элемента 6, причем уровень напряжения Uj в момент прихода управляющего импульса, длительность которого (фиг.З), сохраняет значение предыдущего такта коммутации 4-1, так как ротор ВЭД сохраняет прежнее фиксированное положение (осциллограмма 11, фиг. З) .
По заднему фронту управляющего 25 импульса происходит переключение
фаз ВЭД и ротор начинает перемещение в новое фиксированное положение, при этом сигнал на выходе с ътмирующего элемента 6 Uj изменяет свой уровень
20
30
35
в соответствии с изменением положения ротора. Время t,-t (фиг. З) соответствует длительности изменения напряжения U (сигнала первого датчика положения ротора ВЭД) при перемещении ротора через ось максимальной деформации, а время - длительности изменения напряжения при перемещении ротора через ось минимальной деформации.
0
Длительность управляющего импульса выбирается достаточной для установления уровня напряжения на выходе запоминающего элемента 7. Например, при использовании микросхемы К1100СК2, время записи (выборки) которой составляет 1 мкс, длительность управляющего импульса должна быть в пределах 3-5 мкс. Б момент записи (выборки) сигнала Uj запоминаюпщм элементом 7, т.е. в диапазоне длительности управляющего импульса, возможно равенство измеренного Uj и записанного U сигналов. Тогда напряжение, равное разности указанных сигналов, принимает нулевое значение- (осциллограмма Ug, переходный процесс сигнала записи, фиг. З), чтосоответствует возникновению не0
5
исправности. Возникновение ложного сигнала о неисправности в этот момент предотвращается емкостным фильром на основе конденсатора 12.
Использование предлагаемого изобретения позволяет обеспечить контроль наиболее часто появляющихся неисправностей волнового электропривода, что уменьшает трудоемкость поиска неисправностей.
Формула изобретени
Шаговый электропривод, содержащи последовательно соединенные источни управляющих сигналов, коммутатор фа двигатель и регистрирующий элемент, связанньш с выходами коммутатора
фаз,
отличающийся тем, что, с целью расширения функциональных возможностей путем контроля отказов электропривода с волновым ротором, введены датчики положения ротора, запоминаюш 1й элемент, элемент сравнения и суммирующий элемент, входы которого соединены с датчиками
положения, выход - с входом элемента сравнения, другой вход которого соединен с выходом запоминающего элемента, информационный вход последнего соединен с вьгходом суммирующего элемента, тактируемый вход - с выходом источника управляющих сигналов, выход элемента сравнения соединен с одним из входов регистрирующего элемента, другие входы которого соединены с выходами коммутатора фаз.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления @ -фазным шаговым двигателем | 1988 |
|
SU1534741A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| МЕХАТРОННАЯ СИСТЕМА | 2009 |
|
RU2404503C1 |
| Устройство стартстопного управления четырехфазным шаговым двигателем | 1987 |
|
SU1494196A1 |
| Высокоскоростной вентильный электродвигатель | 1982 |
|
SU1270844A2 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД С ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2400920C1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Стабилизированный параметрический электродвигатель | 1987 |
|
SU1555773A1 |
| Высокоскоростной вентильный электродвигатель | 1983 |
|
SU1264268A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 2017 |
|
RU2659806C1 |
Изобретение относится к электротехнике, к управлению электрическими машинами, и может быть использовано в дискретном электроприводе с двигателями с волновым ротором. Цель состоит в расширении функцио,нальных возможностей путем контроля отказов электропривода с волновым ротором. Электропривод содержит источник 1 управляющих сигналов, выход которого соединен с входом коммутатора 2 фаз, выходы которого соединены с фазами электродвигателя 3 с волновым ротором и в датчиками 4 и 5, выходы которых соединены с входом суммирующего элемента 6. С его выхода суммарное значение напряжения поступает на один из входов запоминающего элемента 7, а с его выхо- дл - на вход элемента 8 сравнения. Разность напряжения с элемента 8 сравнения, несущая информацию о состоянии электропривода, поступает на один из входов элемента 9, регистрирующего характер отказа на основании дополнительной информации электрических сигналов -с выхода тора 2 фаз. 4 ил., 1 табл. I. с (Л 00 
10 11
1 гФиг. 2
и.
-1
1-2
I
5-4
«-/е
Ч-11-2 -3
. . ifut .
Редактор П. Гереши
Составитель В. Алфимов
Техред М.Дндык Корректор Л. Пат аи
6302/56
Тираж 659Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская ., д. А/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проекная, 4
i-ч -//
| Устройство для управления шаговым электродвигателем | 1976 |
|
SU593295A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для обнаружения отказов в системе управления шаговым двигателем | 1981 |
|
SU1029371A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
