задающего генератора 5, фазового дискриминатора 4 и частотного датчика 3 частоты вращения , а выходом - к входу цепи управления коммутатором 12. Другими входами цепь управления, составленная из элементов И 13, 14 и элементов ЗАПРЕТ 15, 16, подключена
к выходам датчика 2 положения ротора. Выходы датчика 2 соединены с входами датчика 3. В электродвигателе исключается зависимость величины угла опережения открывания ключей коммутатора 12 от частоты вращения ротора электродвигателя 1. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2000 |
|
RU2202147C2 |
| ИМПУЛЬСНАЯ ЧАСТОТНО-ФАЗОВАЯ СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2342762C1 |
| Устройство для программного управления положением вала электродвигателя | 1980 |
|
SU907512A1 |
| Синхронно-синфазный электропривод | 1987 |
|
SU1501240A1 |
| Устройство для установки и стабилизации фазового положения блока вращающихся головок | 1986 |
|
SU1515195A1 |
| Устройство для управленияпРиВОдОМ | 1978 |
|
SU809056A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1990 |
|
SU1707723A1 |
| Устройство для управления двигателем и коррекции дрейфа гироскопа | 2021 |
|
RU2789116C1 |
| Устройство для управления ведущим шаговым двигателем | 1981 |
|
SU999022A1 |
Изобретение относится к электротехнике. Цель изобретения - повышение КПД путем увеличения электромагнитного момента. Для этого в стабилизированный параметрический электродвигатель введен блок 6 задержки импульсов, входами подключенный к выходам задающего генератора 4, фазового дискриминатора 5 и частотного датчика 3 частоты вращения, а выходом - к входу цепи управления коммутатором 12. Другими входами цепь управления, составленная из элементов И 13, 14 и элементов "запрет" 15, 16, подключена к выходам датчика 2 положения ротора. Выходы датчика 2 соединены с входами датчика 3. В электродвигателе исключается зависимость величины угла опережения открывания ключей коммутатора 12 от частоты вращения ротора электродвигателя 1. 2 ил.
Изобретение относится к электроехнике, а именно к электрическим маинам с устройствами для бесконтактой коммутации.
Цель изобретения - повышение КПД утем увеличения электромагнитного омента.
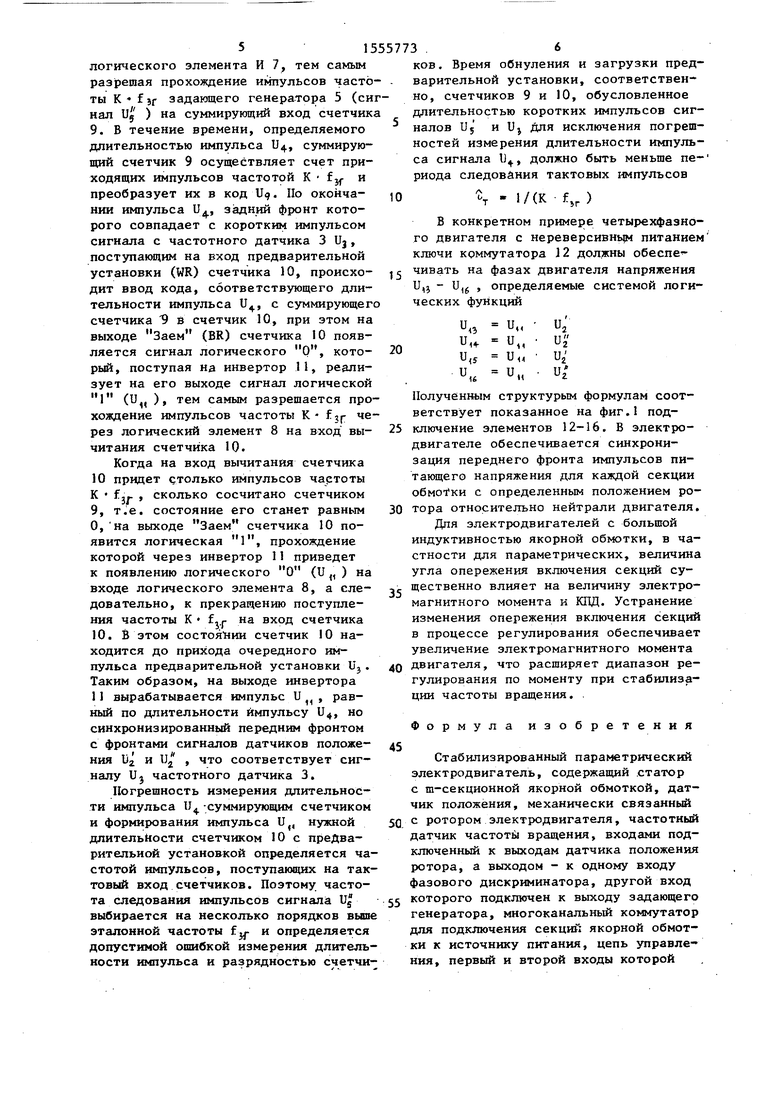
На фиг.1 приведена схема стабилизированного параметрического электродвигателя; на - эпюры сигналов, поясняющие работу электродвигателя.
Стабилизированный параметрический электродвигатель 1 содержит статор с -секционной (ш1) якорной обмоткой, датчик 2 положения ротора, частотный датчик 3 частоты вращения фазового дискриминатора 4, задающий генератор 5 с двумя выходами, один из которых реализует сигналы Us эталонной частоты fjr управления, а второй - сигналы UЈ частотой К- f ,(К 10 ). В электродвигатель введен блок 6 задержки импульсов на вели чину, равную их длительности, составленный из двух элементов И 7 и 8, суммирующего 9 и вычитающего 10 с предварительной установкой счетчиков инвертора И.
Многоканальный коммутатор 12 выполнен на силовых ключах и его управляющий многоканальный вход подключен к многоканальному выходу цепи уп равления, составленной из элементов И 13, 14 и элементов ЗАПРЕТ 15, 16. Первые входы элементов 13-16 образуют третий вход цепи управления, объединенные вторые входы элементов 13,15 и объединенные вторые входы элементов 14, 16 - соответственно первый и второй входы цепи управления, подключенные к выходам датчика 3 положения ротора электродвигателя, к которым подключены входы датчика 3 частоты вращенияо Выход датчика 3 соединен с одним входом фазового дискриминатора
.
t5
20
25
30
35
40
45
50
55
4, другой вход которого подключен к первому выходу задающего генератора
5импульсов.
Первые входы элементов И 7, 8 объединены, образуя первый вход блока
6задержки импульсов, подключенный к второму выходу задающего генератора 5. Второй вход блока 3 задержки, образованный вторым входом элемента И 7, подключен к выходу фазового дискриминатора 4, а третий вход блока 3, являющийся вторым входом элемента И 8, соединен с выходом инвертора 11, образующим выход блока, подключенный к третьему входу цепи управления. Вход инвертора соединен с выходом Заем вычитающего счетчика 10, вход предварительной установки которого подключен к выходу счетчика 9, а вычитающий вход - к выходу второго элемента И 8. Суммирующий вход счетчика 9 соединен с выходом первого элемента
И 7. Вход R установки нуля счетчика 9 и вход WR Запись счетчика 10 образуют четвертый и пятый входы блока задержки, при этом пятый вход соединен с выходом датчика 3 частоты вращения, а четвертый вход - с первым выходом задающего генератора 5.
Электродвигатель работает следующим образом.
По фронтам сигналов датчика 2 положения ротора Uj, Uj (фиг.2), сдвинутым по фазе на 1/4 периода,в частот- ном датчике 3 формируются короткие импульсы U - импульсы частоты вращения. В фазовом дискриминаторе 4, на второй вход которого поступают сигналы Ug и U3 задающего генератора 5 и датчика 3, вырабатывается сигнал фазового рассогласования этих импульсов U4.
Этот сигнал U+ в виде импульса, передний фронт которого совпадает с сигналом Ug, обнуляющим суммирующий счетчик 9, поступает на первый вход
логического элемента И 7, тем самым разрешая прохождение импульсов часто- ты К fjf задающего генератора 5 (сигi
ков. Время обнуления и загрузки предварительной установки, соответственно, счетчиков 9 и 10, обусловленное нал I). ) на суммирующий вход счетчика длительностью коротких импульсов сиг
Когда на вход вычитания счетчика 10 придет столько импульсов частоты К fj.. , сколько сосчитано счетчиком 9, т.е. состояние его станет равным О, на выходе Заем счетчика 10 появится логическая 1, прохождение которой через инвертор 11 приведет к появлению логического О (U f ) на входе логического элемента 8, а сле
довательно, к прекращению поступления частоты К fj.j. на вход счетчика 10. В этом состоянии счетчик 10 находится до прихода очередного импульса предварительной установки U3. Таким образом, на выходе инвертора 11 вырабатывается импульс U , равный по длительности импульсу U4, но синхронизированный передним фронтом с фронтами сигналов датчиков положения Ъ2 и U , что соответствует сигналу Uj частотного датчика 3.
Погрешность измерения длительности импульса U -суммирующим счетчиком и формирования импульса U( нужной длительности счетчиком 10 с предварительной установкой определяется частотой импульсов, поступающих на тактовый вход счетчиков. Поэтому частота следования импульсов сигнала UЈ выбирается на несколько порядков выше эталонной частоты f - и определяется допустимой ошибкой измерения длительности импульса и разрядностью счетчи
ческих функций
налов U5 и Uj для исключения погрешностей измерения длительности импульса сигнала l)f, должно быть меньше пе- риода следования тактовых импульсов
1/(К f,r )
т %« j-jr
В конкретном примере четырехфазно- го двигателя с нереверсивным питанием ключи коммутатора J 2 должны обеспе- чивать на фазах двигателя напряжения ii Ui6 , определяемые системой логи
ческих функций
и
и„
и, и„
U ц
и„
и и;
и иг
ческих функций
Полученным структурым формулам соответствует показанное на фиг.1 под- ключение элементов 12-16. В электродвигателе обеспечивается синхронизация переднего фронта импульсов питающего напряжения для каждой секции обмотки с определенным положением ротора относительно нейтрали двигателя.
Для электродвигателей с большой индуктивностью якорной обмотки, в частности для параметрических, величина угла опережения включения секций существенно влияет на величину электромагнитного момента и КПД. Устранение изменения опережения включения секций в процессе регулирования обеспечивает увеличение электромагнитного момента двигателя, что расширяет диапазон регулирования по моменту при стабилизации частоты вращения.
Формула изобретения
Стабилизированный параметрический электродвигатель, содержащий статор с m-секционной якорной обмоткой, датчик положения, механически связанный с ротором электродвигателя, частотный датчик частоты вращения, входами подключенный к выходам датчика положения ротора, а выходом - к одному входу фазового дискриминатора, другой вход которого подключен к выходу задающего генератора, многоканальный коммутатор для подключения секций якорной обмотки к источнику питания, цепь управления, первый и второй входы которой
соединены с выходами датчика положения ротора, а выходы - с управляющими входами коммутатора, отличающийся тем, что, с целью повышения КПД путем увеличения электромагнитного момента, задающий генератор снабжен вторым выходом, цепь управления составлена из двух элементов И и двух элементов ЗАПРЕТ, первые входы указанных элементов объединены, образуя третий вход цепи управления, попарно объединенные вторые входы первых элементов И и ЗАПРЕТ и вторых элементов И и ЗАПРЕТ организуют соответственно первый и второй входы цепи управления, введен блок задержки импульсов, составленный из двух двухвходовых элементов И, суммирующего и вычитающего счетчиков и инвертора, первые входы элементов И объединены, образуя первый вход блока задержки имплуьсов, подключенный к второму выходу задающего генерато;LT
ч 1
4 t
M-ir-ir-ir-innr-ir-i„
f |ппиш1М1111шп1ПИ1тпишшши1ни111П1Ш1Н „
U9 S л Л S jm „ Mp гч 14. - N IX IV.
д .ащ rag гр%а вза ущ ущ чш яя tfff| р т ,-t г
f г-1т
1
ра, вторые входы указанных элементов И образуют второй-и третий входы блока задержки импульсов, подключенные г-, соответственно к выходу фазового дискриминатора и выходу блока задержки импульсов, образованному выходом инвертора и подключенному к третьему входу цепи управления, вход инвертоg pa подключен к выходу Заем вычитающего счетчика, входы предварительной установки которого соединены с выходами суммирующего счетчика, суммирующий и вычитающий входы упомяну5 тых счетчиков подключены соответственно к выходам первого и второго элементов И блока задержки импульсов, а вход установки нуля суммирующего счетчика и вход Запись вычитающего счето чика образуют четвертый и пятый входы блока задержки импульсов, подключенные соответственно к первому выходу задающего генератора и выходу частотного датчика частоты вращения.
t т т
т т
| Вентильный электродвигатель | 1977 |
|
SU743129A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Синхронизированный вентильный электродвигатель | 1978 |
|
SU681517A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
