1
Изобретение относится к строительным машинам, а именно к гидроприводам одноковшовых экскаваторов.
Цель изобретения - повышение производительности экскаватора.
На фиг. 1 представлена принципиальная гидравлическая схема двустороннего действия гидропривода поворота рукояти, которая является универсальной как для
4, золотник 11, преодолев усилие фиксирую- идей пружины, переместится в положение второй позиции а золотник 12 останется в исходной позиции.
Если в этот момент рукоять блока 8 сдвинута, вследствие чего в линии, например, 9 возникает давление, то оно по линии 14 подается к торцу золотника 5, который перемеш,ается в крайнее положение и соерукояти прямой лопаты, так и для рукояти диняет рабочую линию 3 со сливом, а лиобратной лопаты одноковшового экскаватора; на фиг. 2 - схема одностороннего действия гидропривода поворота рукояти прямой лопаты, которая может быть также использована для рукояти обратной лопаты после перемонтажа гидролиний двухпози- 15 ционного гидроуправляемого золотника.
Гидропривод поворота рукояти одноковшового экскаватора (фиг. 1) содержит напорную линию 1 гидронасоса, в которой уснию 4 - со сливом через дроссель. Под действием внешнего усилия поршень в гидроцилиндре 6 перемешается без использования потока насоса.
Если рукоять блока 8 сдвинута в про- тивоположно.м направлении, то давление возникает в линии 10 и, соответственно, в линии 15 управления золотником 2. Золотник 2 займет положение, указанное на нижней позиции. Поток 1 от насоса поступит
тановлен трехпозиционный силовой ревер- 2о рабочую линию 4 гидроцилиндра 6, а по
сивный гидроуправляемый золотник 2 с рабочими линиями 3 и 4, к которым присоединен золотник 5 безнасосного движения и гидроцилиндр 6. Золотники 2 и 5 имеют общую сливную линию 7. Блок 8 сервоуправ- ления имеет рабочие линии 9 и 10, в которых установлены двухпозиционные гидро- управляемые золотники 11 и 12 с рабочими линиями 13-16. Рабочие линии 13 и 15 соединены с полостями управления золотника 2, а линии 14 и 16 - с полостями управления золотника 5. В свою очередь золотники 11 и 12 имеют линии 17-20 управления. Линии 17 и 18 соединены с рабочей линией 3 гидроцилиндра 6, а линии 19 и 20 - с рабочей линией 4 этого гидроцилиндра. Зо25
30
рабочей линии 3 поток из противоположной полости гидроцилиндра 6 поступит в сливную линию 7. Шток гидроцилиндра 6 перемешается, преодолевая встречную нагрузку. Аналогично работает гидропривод при рас- тягиваюш,их шток нагрузках. При использовании вместо гидроцилиндра другого гидродвигателя, например гидромотора, гидропривод работает аналогичным образом.
При безнасосном движении с видвиже- нием штока для обеспечения надежной подпитки поршневой полости гидроцилиндра 6 необходимо, во-первых, ограничить максимальную относительную скорость штока, например, установкой упора 21, обеспечивающего соответствуюшую величину дрослотник 5 снабжен ограничительными упо- 35 селирующего отверстия в золотнике 5
рами 21.
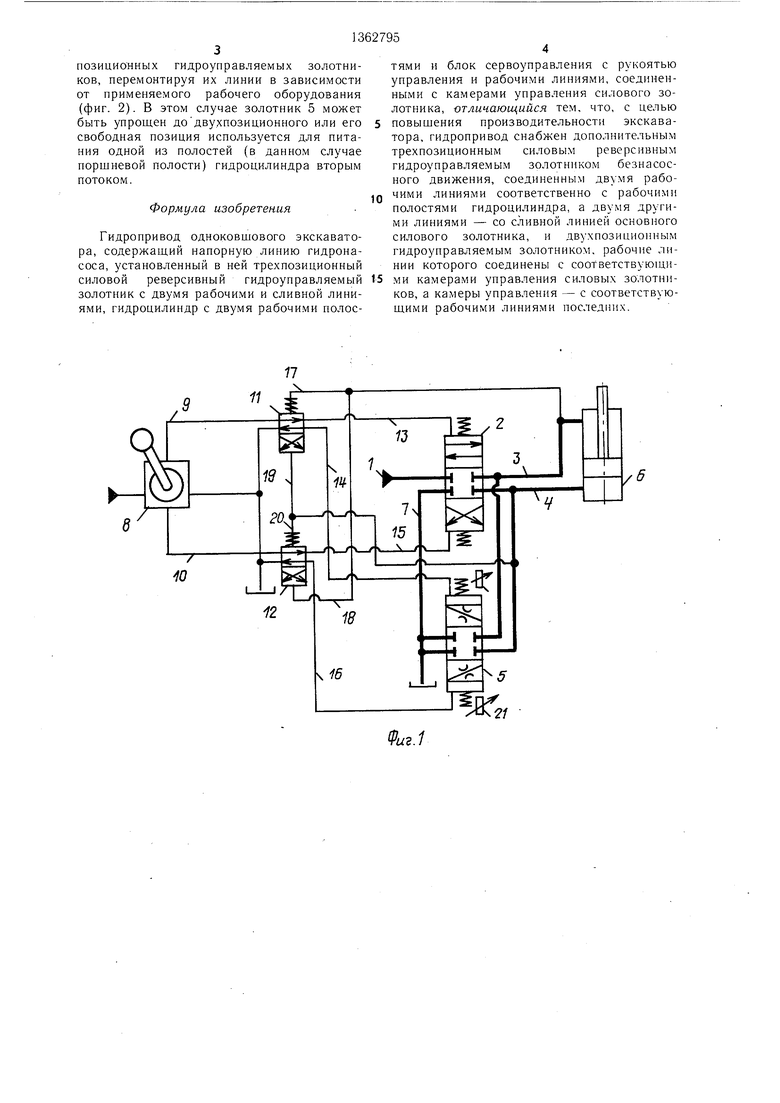
В гидроприводе поворота одностороннего действия (фиг. 2) применен силовой золотник 5 безнасосного движения, к которому подведена напорная линия 22 второго гидронасоса.
Для упрошения чертежа разгрузка потоков 1 и 22, а также фильтры, предохранительные и подпиточные клапаны условно не показаны.
Гидропривод работает следующим обра- 45 зом.
В нейтральной позиции рукояти блока 8 обе его рабочие линии 9 и 10 соединены со сливом, поэтому независимо от положения золотников 11 и 12 линии 13-16 управления силовыми золотниками 2 и 5 соеди- 50 нены со сливом и эти золотники находятся в нейтральной нозиции. Рабочие линии 3 и 4 заперты и гидроцилиндр 6 заторможен.
Предположим, что на гидрЬцилиндр 6 действует внешняя нагрузка сжатия, под действием которой давление в рабочей линии 4 превышает давление в рабочей линии 3. Тогда под действием давления в линиях управления 19 и 20, соединенных с линией
55
во-вторых, ооеспечить достаточное давление и расход в сливной линии 7, для чего в нее подается, например, поток насоса от элемента разгрузки и устанавливается подпорный клапан или дроссель (не показаны). Однако, как правило, достаточным является подпор в сливе, образующийся при полном потоке насоса от сопротивления фиЛь- тра радиатора, наддува в баке и других элементов сливной линии.
Таким образом, та часть элементов цикла экскавации, где на гидроцилиндр рукояти действуют попутные нагрузки, проходит без использования насоса, что позволяет уменьшить непроизводительные потери энер ,гии и задействовать поток этого насоса на другие движения и тем сократить продолжительность цикла, т.е. повысить производительность.
При этом попутные нагрузки на гидроцилиндр рукояти при оборудовании «обратная лопата обычно растягивают шток, а при оборудовании «прямая лопата, как правило, сжимают его. Поэтому достаточно применить силовой двухпозиционный золотник безнасосного движения и один из двух1362795
4, золотник 11, преодолев усилие фиксирую- идей пружины, переместится в положение второй позиции а золотник 12 останется в исходной позиции.
Если в этот момент рукоять блока 8 сдвинута, вследствие чего в линии, например, 9 возникает давление, то оно по линии 14 подается к торцу золотника 5, который перемеш,ается в крайнее положение и соединяет рабочую линию 3 со сливом, а линию 4 - со сливом через дроссель. Под действием внешнего усилия поршень в гидроцилиндре 6 перемешается без использования потока насоса.
Если рукоять блока 8 сдвинута в про- тивоположно.м направлении, то давление возникает в линии 10 и, соответственно, в линии 15 управления золотником 2. Золотник 2 займет положение, указанное на нижней позиции. Поток 1 от насоса поступит
рабочую линию 4 гидроцилиндра 6, а по
рабочей линии 3 поток из противоположной полости гидроцилиндра 6 поступит в сливную линию 7. Шток гидроцилиндра 6 перемешается, преодолевая встречную нагрузку. Аналогично работает гидропривод при рас- тягиваюш,их шток нагрузках. При использовании вместо гидроцилиндра другого гидродвигателя, например гидромотора, гидропривод работает аналогичным образом.
При безнасосном движении с видвиже- нием штока для обеспечения надежной подпитки поршневой полости гидроцилиндра 6 необходимо, во-первых, ограничить максимальную относительную скорость штока, например, установкой упора 21, обеспечивающего соответствуюшую величину дрос
во-вторых, ооеспечить достаточное давление и расход в сливной линии 7, для чего в нее подается, например, поток насоса от элемента разгрузки и устанавливается подпорный клапан или дроссель (не показаны). Однако, как правило, достаточным является подпор в сливе, образующийся при полном потоке насоса от сопротивления фиЛь- тра радиатора, наддува в баке и других элементов сливной линии.
Таким образом, та часть элементов цикла экскавации, где на гидроцилиндр рукояти действуют попутные нагрузки, проходит без использования насоса, что позволяет уменьшить непроизводительные потери энер- ,гии и задействовать поток этого насоса на другие движения и тем сократить продолжительность цикла, т.е. повысить производительность.
При этом попутные нагрузки на гидроцилиндр рукояти при оборудовании «обратная лопата обычно растягивают шток, а при оборудовании «прямая лопата, как правило, сжимают его. Поэтому достаточно применить силовой двухпозиционный золотник безнасосного движения и один из двухпозиционных гидроуправляемых золотников, перемонтируя их линии в зависимости от применяемого рабочего оборудования (фиг. 2). В этом случае золотник 5 может быть упрощен до двухпозиционного или его свободная позиция используется для питания одной из полостей (в данном случае поршневой полости) гидроцилиндра вторым потоком.
Формула изобретения
Гидропривод одноковшового экскаватора, содержащий напорную линию гидронасоса, установленный в ней трехпозиционный
силовой реверсивный гидроуправляемый 15 ми камерами управления силовых золотни- золотник с двумя рабочими и сливной лини- ков, а камеры управления - с соответствую- ями, гидроцилиндр с двумя рабочими полос- щими рабочим и линиями последних.
тями и блок сервоуправления с рукоятью управления и рабочими линиями, соединенными с камерами управления силового золотника, отличающийся тем, что, с целью повышения производительности экскаватора, гидропривод снабжен дополнительным трехпозиционным силовым реверсивным гидроуправляемым золотником безнасосного движения, соединенным двумя рабочими линиями соответственно с рабочими полостями гидроцилиндра, а двумя другими линиями - со сливной линией основного силового золотника, и двухпозиционным гидроуправляемым золотником, рабочие линии которого соединены с соответствующи
ми камерами управления силовых золотни- ков, а камеры управления - с соответствую- щими рабочим и линиями последних.
тями и блок сервоуправления с рукоятью управления и рабочими линиями, соединенными с камерами управления силового золотника, отличающийся тем, что, с целью повышения производительности экскаватора, гидропривод снабжен дополнительным трехпозиционным силовым реверсивным гидроуправляемым золотником безнасосного движения, соединенным двумя рабочими линиями соответственно с рабочими полостями гидроцилиндра, а двумя другими линиями - со сливной линией основного силового золотника, и двухпозиционным гидроуправляемым золотником, рабочие линии которого соединены с соответствующи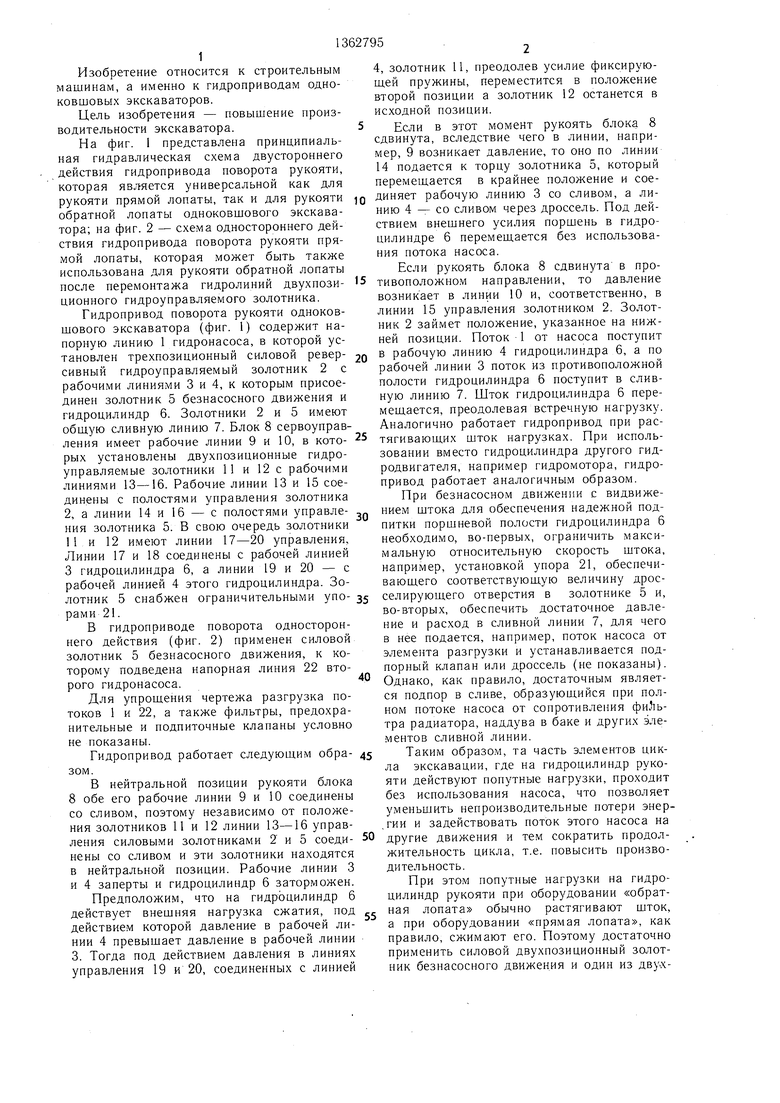
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134679A1 |
| Двухпоточный гидравлический привод рабочего оборудования одноковшового экскаватора | 1987 |
|
SU1467145A1 |
| Гидропривод механизма поворота платформы одноковшового экскаватора | 1986 |
|
SU1364673A2 |
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1313979A1 |
| Гидропривод землеройной машины | 1980 |
|
SU1036862A1 |
| Рабочее оборудование экскаватора | 1987 |
|
SU1472587A1 |
| Гидропривод одноковшового экскаватора | 1989 |
|
SU1691485A1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ЭКСКАВАТОРА С УСТРОЙСТВОМ РАЗГРУЗКИ | 1991 |
|
RU2006557C1 |
| Гидропривод одноковшового экскаватора | 1980 |
|
SU949092A1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2005 |
|
RU2304667C1 |
Изобретение относится к строительным машинам. Цель изобретения - повышение произв-ти экскаватора. В напорной линии I гидронасоса установлен трехпозиционный силовой реверсивный гидроуправляемый золотник 2 и блок 8 сервоуправления с рукоятью. К рабочим линиям (РЛ) 3 и 4 золотника 2 присоединен золотник 5 безнасосного движения и гидроцилиндр (ГЦ) 6. Золотники 2 и 5 имеют общую сливную линию 7. При этом РЛ блока 8 соединены с камерами управления золотника 2, а РЛ золотника 5 соединены с рабочими полостями ГЦ 6. Две другие РЛ золотника 5 соединены с линией 7. В РЛ 9 и 10 блока 8 установлены двухпозиционные гидроуправляе- мые золотники 11 и 12. Их РЛ соединены с соответствующими камерами управления золотников 2. Камеры управления золотников 11 и 12 соединень с РЛ 3 и 4. Под действием внещней нагрузки при сдвинутой рукояти блока 8 в РЛ 9 возникает давление, передающееся в золотник 5. Последний перемещается, соединяя РЛ 3 и 4 со сливом. Под действием внещнего усилия поршень в ГЦ 6 будет перемещаться без использования потока насоса. При перемещении рукояти блока 8 в противоположное направление давление возникает в РЛ 10. Поток от насоса поступает через РЛ 4 в ГЦ 6. По РЛ 3 из противоположной полости ГЦ 6 поступает на слив. Шток ГЦ 6 будет перемещаться, преодолевая сопротивление, 2 ил. (Л оо Oi bO со СП
NST
10
Фиг. 2
| Системы гидроприводов полноповоротных экскаваторов | |||
| Обзор | |||
| М.: ЦНИИТЭ Строймаш, 1981, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
