Изобретение относится к землеройным машинам, а именно к гидроприводам одноковшовых экскаваторов, и предназначено для совершенствования их рабочего оборудования.
Цель изобретения - повышение производительности.
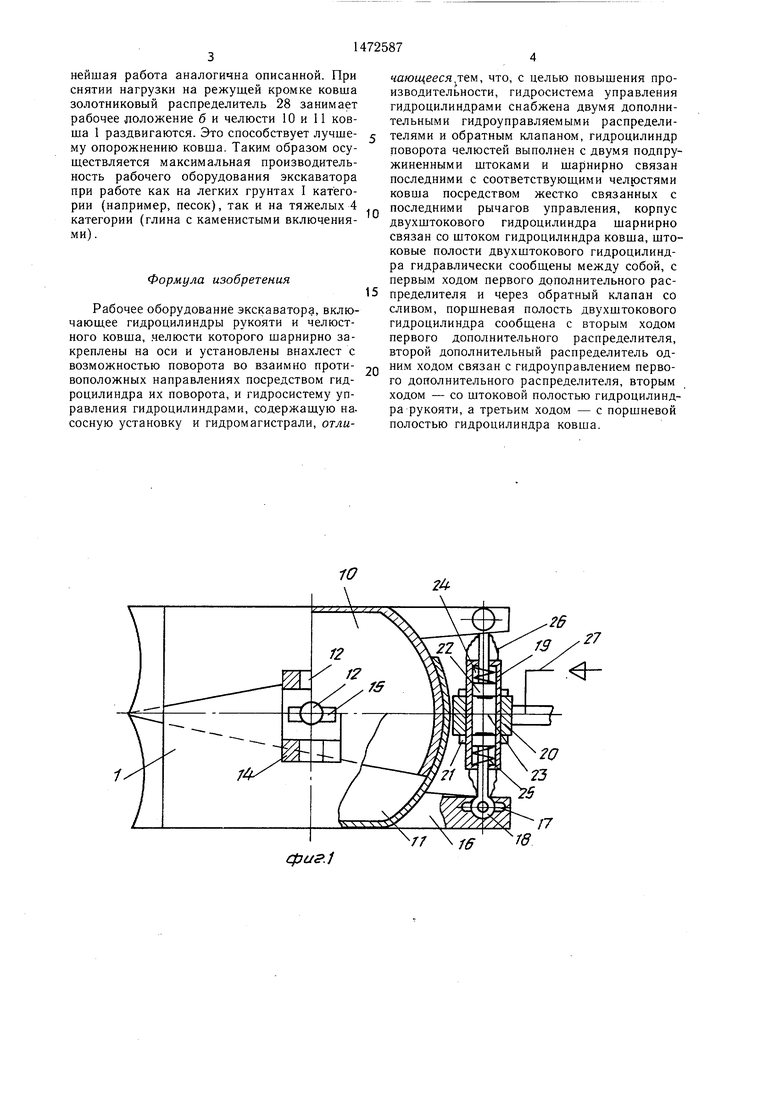
На фиг. 1 изображен ковш, вид сверху; на фиг. 2 - то же, вид сбоку; на фиг. 3 - рабочее оборудование экскаватора со схемой управления.
Рабочее оборудование экскаватора содержит ковш 1, рукоять 2 с гидроцилиндром 3 управления ковшом и стрелу 4 с гидроцилиндром 5 управления рукоятью 2. Гидророцилиндра 19 управления и пружин 25, находящихся в его штоковых полостях 24, происходит поворот рычагов 16 управления относительно осей шарниров 12 и 13 ковша. 1. г При этом периметр резания и вместимость ковша максимальны. Рабочая жидкость из поршневой полости 23 гидроцилиндра 19 управления через гидромагистраль 27 и гид- роуправляемый распределитель 28, находящийся в положении б, поступает в гидромагистраль 30 и на слив гидросистемы экскаватора. Подпитка рабочей жидкостью штоковых полостей 24 гидроцилиндра 19 управления осуществляется по гидромагистрали 37 через обратный клапан 39 из бака 40
10
Jlrln ALJUIVI kj у lljJClDt l.V.nrl.l р J fiW/l I - .
цилиндр 5 посредством гидромагистралей 6 15 для рабочей жидкости. При внедрении .,,,л11-1т-.т-.17ГГ т Пт- ТЛП Г /-чТТ 1Д ГТТЛ и П nfi S Л/ГТП ЯД ГТРНН я
и 7 и гидроцилиндр 3 посредством гидромагистралей 8 и 9 связаны с гидросистемой экскаватора. Ковш 1 включает челюсти 10 и 11 с днищами, установленные внахлест и закрепленные посредством шарниров 12 и 13. Шарнир 12 имеет проушину 14 для шарнирного крепления с рукоятью 2. Крепление осей осуществлено фиксаторами 15. На челюстях ковша установлены рычаги 16 управления, имеющие пазовые полости 17 креп20
ша 1 в грунт в гидроцилиндре 5 управления рукоятью 2 (фиг. 3) или в гидроцилиндре 3 управления поворотом ковша 1 в зависимости от технологии экскавации: поворотом рукояти 2 при фиксированном положении ковша 1 или поворотом ковша 1 при фиксированном положении рукояти 2, создается рабочее давление жидкости, которое воздействует посредством гидромагистралей 6, 36 и 34 и 9, 35 и 33 на гидроуправляемый расления штоков 18 гидроцилиндра 19 управле- 25 пределитель 32. При уровне рабочего дав- ния, на корпусе которого шарнирно с воз- ления в штоковой полости гидроцилиндра 5 можностью вращения закреплен шток 20 гид- управления рукоятью 2, превышаюцгем уро- роцилиндра 3 ковша. Осевое перемещение шарнирного соединения ограничено фиксирующими упорами 21. Гидроцилиндр 19 управления имеет штоки 18 с поршнями 22, 30 разделяюшими поршневую 23 и две штоко- вые 24 полости. В штоковых полостях 24 установлены пружины 25. Для защиты от абразивных частиц на штоках 18 и корпусе гидроцилиндра 19- управления закреплены защитные кожухи 26. Порщневая полость 23 гидравлически связана посредством гидромагистрали 27 и двухпозиционного регулируемого автоматически управляемого золотникового распределителя 28 либо с напорной гидромагистралью 29 (рабочее по- 40 ложение золотника а), либо со сливной гидромагистралью 30 (рабочее положение золотника б). Распределитель 28 связан гидромагистралью 31 управления с автоматически управляемым двухпозиционным золотниковым распределителем 32, который имеет рабочие положения золотника виги снабжен гидромагистралями 33 и 34 управления, гидравлически связанными посредством гидромагистралей 35 и 36 с гидромагистралями 9 и 6 соответственно..Штоковые полости гидроцилиндра 19 связаны между собой гидромагистралью 37 и посредством гидромагистрали 38 - с распределителем. 28, а также через обратный клапан 39 - с баком 40 для рабочей жидкости.
Оборудование экскаватора работает 5: следующим образом.
При отсутствии нагрузки на ковше 1 (фиг. 1 и 2) под действием щтоков 18 гидвень рабочего давления в поршневой полоС- ти гидроцилиндра 3 поворота ковша 1, распределитель 32 занимает рабочее положение в. При этом давление жидкости через гидромагистраль 31 управления распределителем 28 воздействует на его золотник. Если данный уровень давления превышает уровень давления настройки золотника, последний занимает рабочее положение а. При этом рабочая жидкость по гидромагистралям 29 и 27 поступает в поршневую полость 23 гидроцилиндра 19. Под действием этого давления штоки 18 гидроцилиндра 19 раздвигаются и, воздействуя на рычаги, поворачивают челюсти 10 и 11 ковша в противоположных направлениях. Происходит автоматическое уменьшение периметра резания (копания) грунта, за счет чего увеличивается удельное усилие на режущей кромке ковша 1 дг Несмотря на уменьшение периметра резания вместимость ковша увеличивается за счет увеличения объема ковша, находящегося за шарниром 12 крепления ковща 1. Значение вместимости ковша определяется расстояниями от оси вращения челюстей до режущего периметру и задней стенки. Зна чение давления срабатывания гидроцилиндра 19 определяется настройкой распредели теля 28. В случае, когда давление в порщне вой полости гидроцилиндра 3 поворота ков ща превышает давление в штоковой полос ти гидроцилиндра 5 рукояти, распредели тель 32 занимает рабочее положение г и рабочее давление через гидромагистраль 3 воздействует на распределитель 28. Даль
50
роцилиндра 19 управления и пружин 25, находящихся в его штоковых полостях 24, происходит поворот рычагов 16 управления относительно осей шарниров 12 и 13 ковша. 1. При этом периметр резания и вместимость ковша максимальны. Рабочая жидкость из поршневой полости 23 гидроцилиндра 19 управления через гидромагистраль 27 и гид- роуправляемый распределитель 28, находящийся в положении б, поступает в гидромагистраль 30 и на слив гидросистемы экскаватора. Подпитка рабочей жидкостью штоковых полостей 24 гидроцилиндра 19 управления осуществляется по гидромагистрали 37 через обратный клапан 39 из бака 40
гI
для рабочей жидкости. При внедрении ковдля рабочей жидкости. При внедрении ков,,,л11-1т-.т-.17ГГ т Пт- ТЛП Г /-чТТ 1Д ГТТЛ и П nfi S Л/ГТП ЯД ГТРНН я
ша 1 в грунт в гидроцилиндре 5 управления рукоятью 2 (фиг. 3) или в гидроцилиндре 3 управления поворотом ковша 1 в зависимости от технологии экскавации: поворотом рукояти 2 при фиксированном положении ковша 1 или поворотом ковша 1 при фиксированном положении рукояти 2, создается рабочее давление жидкости, которое воздействует посредством гидромагистралей 6, 36 и 34 и 9, 35 и 33 на гидроуправляемый рас пределитель 32. При уровне рабочего дав- ления в штоковой полости гидроцилиндра 5 управления рукоятью 2, превышаюцгем уро-
5 пределитель 32. При уровне рабочего дав- ления в штоковой полости гидроцилиндра 5 управления рукоятью 2, превышаюцгем уро- 0 0
:
вень рабочего давления в поршневой полоС- ти гидроцилиндра 3 поворота ковша 1, распределитель 32 занимает рабочее положение в. При этом давление жидкости через гидромагистраль 31 управления распределителем 28 воздействует на его золотник. Если данный уровень давления превышает уровень давления настройки золотника, последний занимает рабочее положение а. При этом рабочая жидкость по гидромагистралям 29 и 27 поступает в поршневую полость 23 гидроцилиндра 19. Под действием этого давления штоки 18 гидроцилиндра 19 раздвигаются и, воздействуя на рычаги, поворачивают челюсти 10 и 11 ковша в противоположных направлениях. Происходит автоматическое уменьшение периметра резания (копания) грунта, за счет чего увеличивается удельное усилие на режущей кромке ковша 1. г Несмотря на уменьшение периметра резания вместимость ковша увеличивается за счет увеличения объема ковша, находящегося за шарниром 12 крепления ковща 1. Значение вместимости ковша определяется расстояниями от оси вращения челюстей до режущего периметру и задней стенки. Значение давления срабатывания гидроцилиндра 19 определяется настройкой распределителя 28. В случае, когда давление в порщне- вой полости гидроцилиндра 3 поворота ковща превышает давление в штоковой полости гидроцилиндра 5 рукояти, распределитель 32 занимает рабочее положение г и рабочее давление через гидромагистраль 31 воздействует на распределитель 28. Даль0
нейшая работа аналогична описанной. При снятии нагрузки на режущей кромке ковша золотниковый распределитель 28 занимает рабочее лоложение б и челюсти 10 и 11 ковша 1 раздвигаются. Это способствует лучшему опорожнению ковша. Таким образом осу- ш,ествляется максимальная производительность рабочего оборудования экскаватора при работе как на легких грунтах I категории (например, песок), так и на тяжелых 4 категории (глина с каменистыми включениями) .
Формула изобретения
Рабочее оборудование экскаватора, вклю- чаюш,ее гидроцилиндры рукояти и челюстного ковша, .челюсти которого шарнирно закреплены на оси и установлены внахлест с возможностью поворота во взаимно противоположных направлениях посредством гидроцилиндра их поворота, и гидросистему управления гидроцилиндрами, содержаш,ую насосную установку и гидромагистрали, отли0
5
0
чающееся.тем, что, с целью повышения производительности, гидросистема управления гидроцилиндрами снабжена двумя дополнительными гидроуправляемы.ми распределителями и обратным клапаном, гидроцилиндр поворота челюстей выполнен с двумя подпружиненными штоками и шарнирно связан последними с соответствующими челюстями ковша посредством жестко связанных с последними рычагов управления, корпус двухштокового гидроцилиндра шарнирно связан со штоком гидроцилиндра ковша, што- ковые полости двухштокового гидроцилиндра гидравлически сообщены между собой, с первым ходом первого дополнительного распределителя и через обратный клапан со сливом, поршневая полость двухштокового гидроцилиндра сообщена с вторы.м ходом первого дополнительного распределителя, второй дополнительный распределитель одним ходом связан с гидроуправлением первого дополнительного распределителя, вторым ходом - со щтоковой полостью гидроцилиндра рукояти, а третьим ходом - с поршневой полостью гидроцилиндра ковша.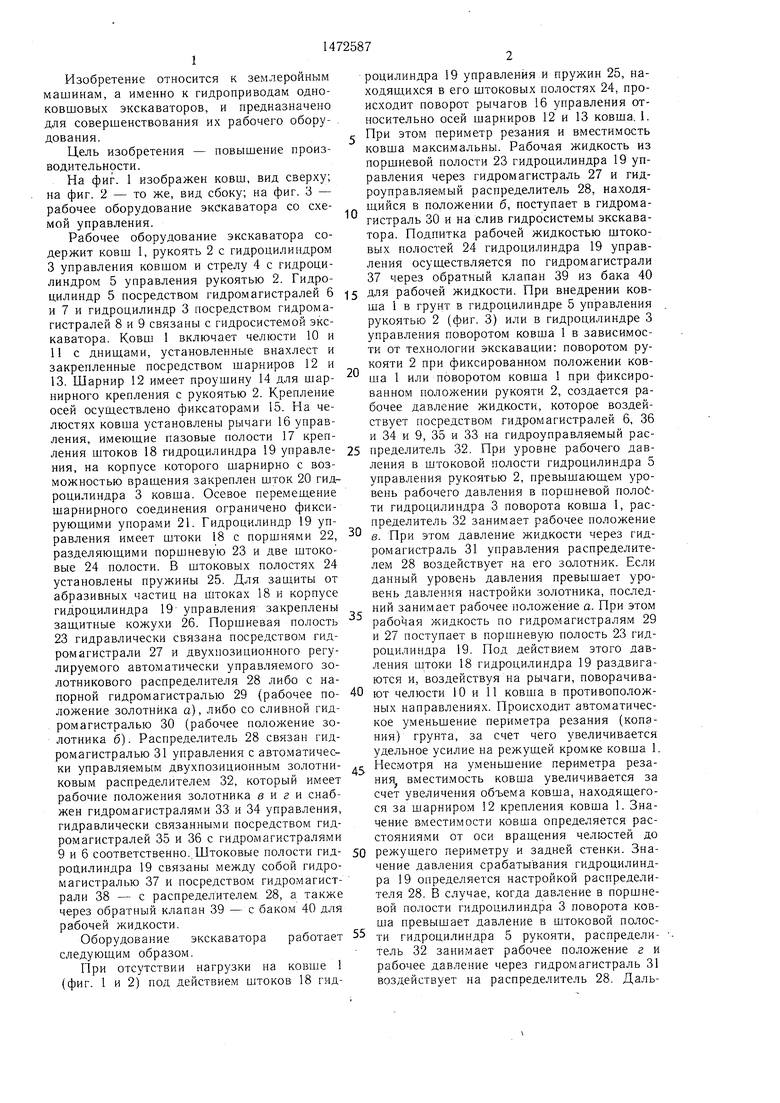
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1313979A1 |
| Гидропривод управления рабочим оборудованием гидравлического экскаватора | 1988 |
|
SU1546574A1 |
| Двухпоточный гидравлический привод рабочего оборудования одноковшового экскаватора | 1987 |
|
SU1467145A1 |
| Рабочее оборудование обратной механической лопаты | 1989 |
|
SU1701833A1 |
| Гидравлический экскаватор для образования траншей под защитой тиксотропного раствора | 1987 |
|
SU1461841A1 |
| Рабочее оборудование одноковшового экскаватора | 1985 |
|
SU1313957A1 |
| Гидропривод фронтального погрузчика | 1983 |
|
SU1126669A1 |
| Двухпоточный гидропривод экскаватора | 1979 |
|
SU891869A1 |
| Электрогидросистема управления процессом копания землеройной машины цикличного действия | 1982 |
|
SU1112100A1 |
| Гидропривод погрузчика | 1982 |
|
SU1084392A1 |
Изобретение относится к землеройным машинам и позволяет повысить производительность одноковшового экскаватора с гидравлическим приводом. Рабочее оборудование экскаватора включает рукоять 2 с гидроцилиндром (ГЦ) 5 управления, челюстной ковш 1 с ГЦ 3 управления и гидросистему управления. Челюсти 10 и 11 ковша 1 шарнирно скреплены между собой с возможностью поворота во взаимно противоположных направлениях посредством ГЦ 19. Последний выполнен с двумя подпружиненными штоками 18. Корпус ГЦ 19 шарнирно связан со штоком 20 ГЦ 3, а штоковые полости 24,25 сообщены со сливом через обратный клапан 39. При внедрении ковша 1 в грунт в ГЦ 5 (или в ГЦ 3) создается рабочее давление жидкости, которое воздействует посредством гидромагистралей (ГМ) 6,36 и 34 (или ГМ 9,35 и 33) на гидроуправляемый распределитель (ГР) 32. При уровне рабочего давления в штоковой полости ГЦ 5, превышающем уровень рабочего давления в поршневой полости ГЦ 3, золотник ГР 32 занимает положение в. Давление жидкости через ГМ 31 воздействует на золотник ГР 28. Если данный уровень давления превышает уровень давления настройки этого золотника, последний занимает положение а. Рабочая жидкость по ГМ 29 и 27 поступает в поршневую полость ГЦ 19. Под действием этого давления штоки 18 ГЦ 19 раздвигаются и поворачивают челюсти 10 и 11 ковша 1 в противоположных направлениях. Происходит автоматическое уменьшение периметра резания грунта. Увеличивается удельное усилие на режущей кромке ковша 1. Одновременно увеличивается часть объема ковша, находящаяся за шарниром крепления последнего. 3 ил.
фиг.1
/
/7
cpuaZ
/J
| КОВШ ЭКСКАВАТОРА | 1972 |
|
SU435324A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ковш экскаватора | 1972 |
|
SU534552A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
