На существующих рельсобалочных станах, оборудованных колодцами замедленного охлаждения, подача искривленных рельсов на рольганг перед роликоправильной мащиной осуществляется по стационарному стеллажу при помощи канатных или цепных щленперов. Вследствие бсльщой гибкости длинных рельсов использование подъемных роликов, встроенных в рольганг, не гарантирует стопроцентной кантовки рельсов в положение «стоя на подошву, что приводит к применению ручного труда на этой операции.
Предлагаемое устройство, выполненное в виде стационарного вогнутого стеллажа, снабженного манипуляторами с рычажными захватами, исключает двойную кантовку и связанные с этим ручные операции.
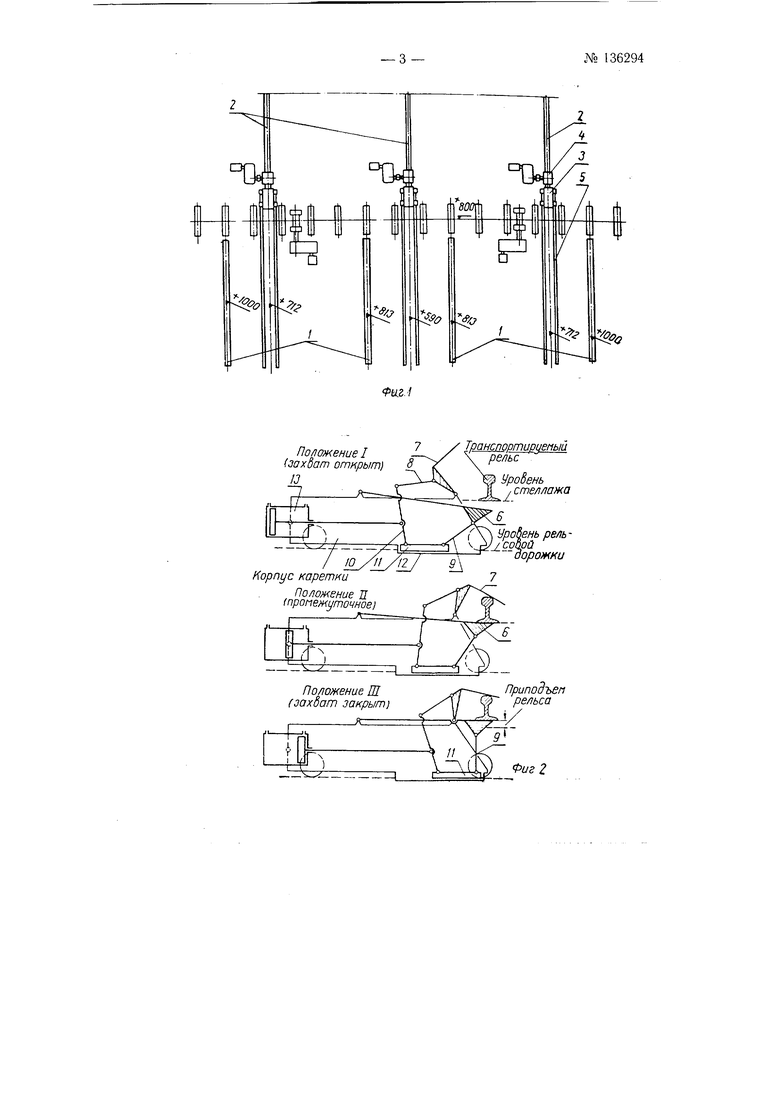
На фиг. 1 показана схема предлагаемого устройства; на фиг. 2 - рычажный механизм захвата; на фиг. 3 - датчик, дающий команду па остановку кареток манипуляторов при подходе их к рельсу.
Стеллаж 1 представляет собой рельсовый настил в поперечном направлении вогнутый по кривизне рельсов. Вогнутость стеллажа выбирается из условия обеспечения устойчивости рельсов в положении «стоя на подощве по всей длине стеллажа во всем диапазоне исходной кривизны рельсов после охлаждения в колодцах. Уровень стеллажа устанавливается таким образом, что нижняя точка искривленного рельса, уложенного на стеллаже, находилась на уровне полотна рольганга перед роликоправильной мащиной.
Манипуляторы 2 предназначены для выдачи рельсов по одному в положении «стоя па подощве со стеллажа на рольганг без трения их подощв о настил стеллажа. Манипуляторы расположены на разных уровнях по кривизне стеллажа в промежутках между рельсами настила стеллажа. Основными узлами манипулятора являются каретка 3 с установленным на ней рычажным механизмом захвата, реечный механизм 4 передвижения каретки и рельсовая дорожка 5.
№ 136294- 2 -
Рычажныймеханизм захвата состоит из зажимов 6 к 7, рычагов 8, 9 и 10, ползуна П, перемещающегося в направляющей 12, и пневмоцилиндра 13. Оси зажимов 6 и 7, направляющая 12 и цапфы пиевмоцилиндра 13 укреплены в корпусе каретки.
В исходном положении (положение / на фиг. 2) зажим 7 откинут и упирается в корпус каретки, зажим 6 находится в нижнем положении, а ползун // - в крайнем заднем положении и упирается в корпус каретки. При подаче воздуха в цилиндр под действием его щтока рельс зажимается зажимами 6 и7 (положение // на фиг. 2). Затем ползун // доходит до крайнего переднего положения и упирается в корпус каретки. Рычаг Я занимая вертикальное положение, приподнимает зажатый рельс над уровнем стеллажа для подачи его на рольганг (положение /// па фиг. 2).
На корпусе каретки установлен датчик, дающий команду на остановку кареток манипуляторов при подходе их к рельсу. Датчик представляет собой рейку 14 с упором 15, которая перемещается в подщипниках 16. Рейка сцепляется с щестерней 17, выполненной как одно целое с кулачком, который воздействует на конечный выключатель 18. Внутри щестерни смонтирована пружина кручения 19, предварительно закрученная на некоторый угол. Раскручиванию пружины препятствует упор 20, который упирается в зуб кулачка. Упор 15 при подходе к рельсу упирается Б его подощву. Рейка 14, перемещаясь, вращает шестерню 17 с кулачком и закручивает пружину 19. Кулачок, нажимая на рычаг конечного выключателя 18, подает импульс на остановку каретки.
Предмет изобретения
Устройство для подачи искривленных рельсов на рольганг перед роликоправильной мащиной, отличающееся тем, что, в целях избежания ручной раскантовки рельсов, оно выполнено в виде стационарного вогнутого стеллажа, снабженного манипуляторами с рычажными захватами для выдачи рельсов по одному в положении «стоя на подошве со стеллажа на рольганг.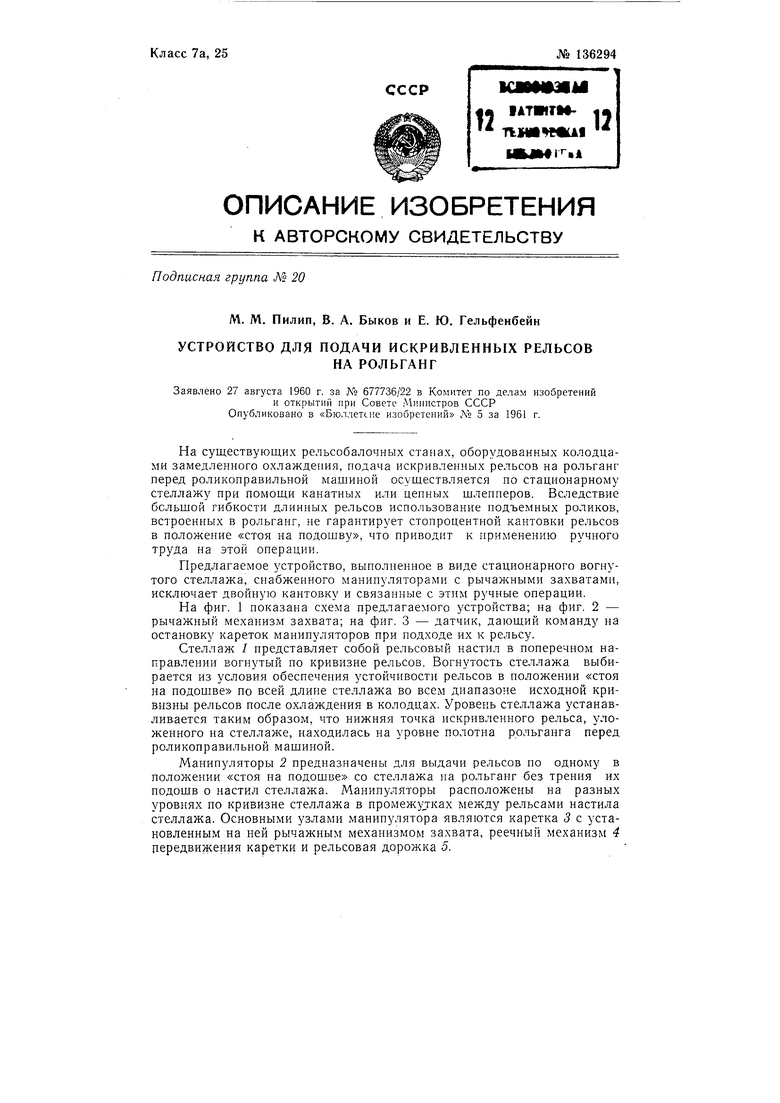

| название | год | авторы | номер документа |
|---|---|---|---|
| Шлепперная тележка с управляемым кулаком | 1959 |
|
SU123925A1 |
| Кантователь для инспекторских стеллажей сортовых и рельсобалочных станов | 1958 |
|
SU119164A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Настилочная машина | 1936 |
|
SU48126A1 |
| Автоматизированный технологический комплекс для обработки фасонного и сортового проката | 1987 |
|
SU1511020A1 |
| ШЛЕППЕРНОЕ УСТРОЙСТВО | 1971 |
|
SU311675A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРИРОВАНИЯ И ПОДАЧИ БРЕВЕН РАЗЛИЧНОЙ ДЛИНЫ | 1992 |
|
RU2080245C1 |
| Устройство для подачи профильного проката в пресс-ножницы | 1982 |
|
SU1038116A1 |
| Устройство для снятия початков и установки шпуль на прядильных машинах | 1948 |
|
SU81854A1 |

Положение I (захдат открыт)
13
2 орпус каретки
Положение П inpofiefKi/mo4Hoei
TpaHcnopjmpyenbiu репье
Э Уроёень , стеллажа
Урооень рель h соорй aopoiKKu
/о /П /12,
Приподъе/1 рельса
Фиг 2
0 1Ю Ш Ш opnyc каретхи понцгтятора
