(54) РУКА МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1983 |
|
SU1121132A2 |
| Рука манипулятора | 1986 |
|
SU1364462A2 |
| Рука манипулятора | 1980 |
|
SU982896A2 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| МЕХАНИЧЕСКИЙ АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР | 2022 |
|
RU2803482C1 |
| Манипулятор Ильина | 1983 |
|
SU1148777A1 |
| Манипулятор | 1976 |
|
SU538957A1 |
| Манипулятор, работающий в герметизированном объеме | 1990 |
|
SU1785897A1 |
| Манипулятор | 1977 |
|
SU611773A1 |
| Пневмобаллонная крепь | 1987 |
|
SU1550163A1 |
1
Изобретение относится к области роЬототех- НИКИ, более конкретно к манипуляторам.
Известна рука манипулятора, содержащая последовательно соединенные шарнирные звенья, приводы и захват 1.
Недостатком известной руки манипулятора является малая зона обслуживаемото пространства из-за недостаточной гибкости и громоздкости руки.
Цель изобретения - расширение зоны обслуживания.
Для этого звенья выполнены в виде телскопических цилиндров, соединенных собой с помощью тороидальных эластичных баллонов.
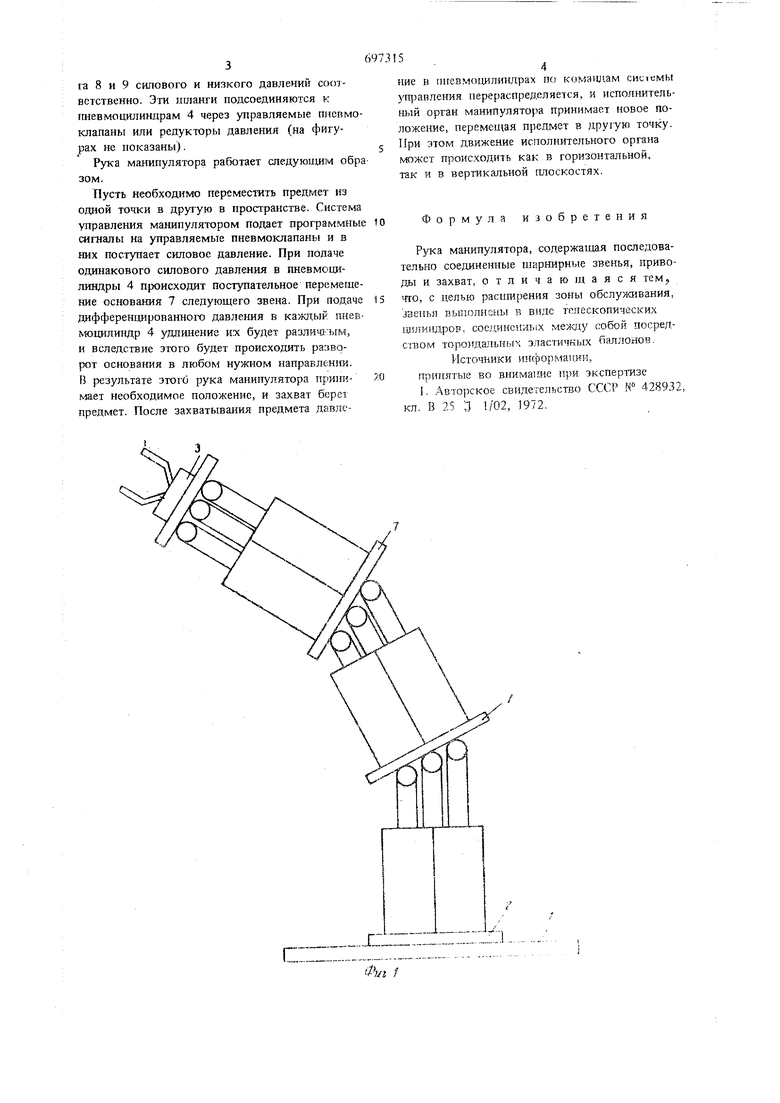
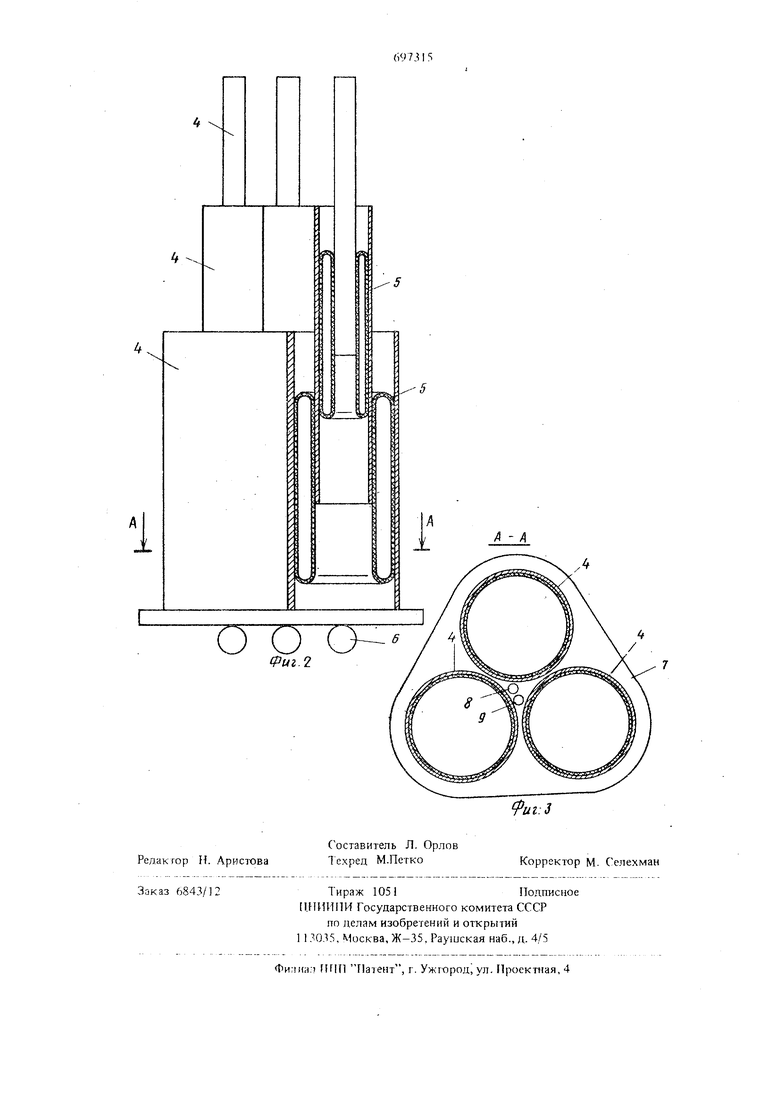
На фиг. ) изображен обнхий вил манипулятора; на фиг. 2 - одно звено руки манипулятора; на фиг. 3 - сечение А--А на фиг.2
К корпусу 1 креп.чтся основание 2 первого звена. К последнему звену руки крепится захват 3. Телескопические пневмоцилиндры 4 . представляют собой совокупность нескольких тонкостенных цилиндров, соединенн1 1х между собой с помощью тороалальных эластичных
баллонов 5. Баллоны нацуты газом, плотно пргътегают к внешни.м по отношению к ним цилиндрам и плотно охватывают внутренние шшиндры, чем обеспечивается герметичность внутренней полости телескопюшского пневмоШ1линдра 4. Внутреннее отверстие самого тонкого цилиндра закрыто заглушкой:. При подаче силового давления во внутреннюю полость Г невмоцилиндра тор01 дальные баллонь нач1шают перекатываться и передвигаются к конусам внешних цилиндров, одновременно выталкивая внутренние, что приводит к удлинению пневм.о1шли11дра. Обратный ход пневмоцилиндра осушестоляется за счет вакуумирования. Для предотвращения выталкивания баллонов из внешнего цшп)щра и внугреннего цилиндра из баллона, а также для улучшения герметичнос;ги баллоны прикрепляют по кольцу к внешнему и внутреннему цщднндрам, например, приклеивая их. Концы нневмоци.лнндров приклеиваются к шарнирам 6, расположенным на основании 7 следующего звена. Для подачи силового давления и отсасьнзания газа в руке манипуляюра предусмотрены два гибких Н1ланга 8 и 9 силового и низкого давлений соответственно. Эти ашанги подсоединяются к пнев МО цилиндрам 4 через управляемые плевмоклапаны или редукторы давления (на фигурах не показаны).
Рука манипулятора работает следующим обрЗ зом.
Пусть необходимо переместить предмет из одной точки в другую в пространстве. Система управления манипулятором подает программные сигналы на управляемые пневмоклапаны и в них поступает силовое давление. При подаче одинакового силового давления в пневмоцилиндры 4 происходит поступательное перемещение основания 7 следующего звена. При подаче дифференцированного давления в ка юхый: пнев юцилиндр 4 удлинение их будет разлищ:ым, и вследствие этого будет происходить pa:№Qрот ОСНОЩЮ1Я в любом нужном напраБлс:Н ш. В результате этого рука манип лятора припимает необходимое положение, и захват бере предмет. После захватывания предмета давле иле в гщевмоциттиндрах по снуемы ущ авления перераспределяется, и исполнительный орган манипулятора принимает новое положение, перемещая предмет в другую точку. При этом движение исполнительного органа может происходить как в горизонтальной, так и в вертикальной плоскостях.
Формула изобретения
Рука манипулятора, содержащая последовательно соединенные шарнирные звенья, приводы и захват, отличающаяся тем ПО, с целью расширения зоны обслуживания, звенья выполнень в внле телескопических га ЛИ Здров, соединенных меяеду собой посредстаом торО11дальных эластичных баллонов.
Источники информации, принятые во BHHMEiffle при экспертизе 1. .4вторское свидетельство СССР № 428932 кл. В 25 3 1/02, 1972.
C.I
П 1
