Изобретение относится к робототехнике, а именно к манипуляторам.
По основному ав. св. № 697315 известна рука манипулятора, содержащая последовательно соединенные шарнирные звенья, приводы и захват, причем звенья выполнены в виде телескопических цилиндров, соединенных между собой посредством тороидальных эластичных баллонов 1.
Однако эластичные тороидальные баллоны, заполненные сжатым газом, не обеспечивают жесткого, фиксированного положения цилиндров, неизбежно в процессе работы в поперечном направлении возникают перекосы цилиндров, что приводит к неточному наведению и позиционированию исполнительного органа манипулятора.
Кроме того, в данном устройстве возникают также поперечные колебания цилиндров из-за пружинящих свойств эластичных баллонов и отсутствия жесткой связи телескопических цилиндров между собой, что усложняет управление этим манипулятором. Все это не позволяет осуществлять операции, требующие большой точности и четкости проведения.
Целью изобретения является повышение жесткости и точности позиционирования.
Указанная цель достигается тем, что рука манипулятора, содержащая последовательно соединенные шарнирные звенья, приводы и захват, причем звенья выполнены в виде телескопических цилиндров, соединенных между собой посредством тороидальных .эластичных баллонов, снабжена жесткими трубчатыми вкладышами, наружная поверхность которых покрыта слоем антифрикционной среды, установленными в полости тороидальных эластичных баллонов.
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - одно звено руки манипулятора; на фиг. 3 - сечение А-А на фиг. 2.
Предлагаемая рука манипулятора содержит несколько звеньев, каждое из которых состоит из основания 1, установленных на нем пневмоцилиндров 2 с телескопически выдвигаемыми внутренними пневмоцилиндрами 3 и 4, соединенными между собой с помощью тороидальных эластичных баллонов 5. В каждом из тороидальных баллонов размещен жесткий трубчатый вкладыш 6, покрытый слоем антифрикционной среды, например масла. Тороидальные баллоны 5 плотно прилегают к внешним по отношению к ним цилиндрам и плотно
охватывают внутренние цилиндры. Основание 1 первого звена крепится к корпусу 7, а к последнему звену руки крепится исполнительный орган, например захват 8.
Внутреннее отверстие самого тонкого пневмоцилиндра 4 закрыто заглущкой. Концы пневмоцилиндров фиксируются к tiiapнирам 9, расположенным на основании следующего звена. Для подачи силового давления и отсасывания газа в руке манипулятора предусмотрены два гибких шланга 10 и 11 силового и низкого давлений соответственно. Эти шланги подсоединяются к пневмоцилиндрам 2 через управляемые пневмоклапаны или редукторы давления (не показано).
Рука манипулятора работает следующим образом.
При необходимости переместить предмет в пространстве подают сигналы на, управляемые клапаны и в них поступает силовое давление. При подаче силового давления во внутреннюю полость пневмоцилиндра тороидальные баллоны начинают перекатываться и передвигаются к конусам внешних цилиндров, одновременно выталкивая внутренние, что приводит к удлинению пневмоцилиндра. При перекатывании тороидальных баллонов вместе с ними перемещаются трубчатые вкладыщи, проскальзывая по внутренней поверхности баллонов, благодаря наличию антифрикционной среды.
Плотное прилегание трубчатых вкладыщей через поверхность тороидальных баллонов к пневмоцилиндрам обеспечивает соосность пневмоцилиндров в процессе работы устройства, устраняет перекосы и колебания и тем самым повышает точность наведения и позиционирования руки манипулятора.
При подаче одинакового силового давления в пневмоцилиндре 2 происходит поступательное перемещение основания следующего звена. При подаче дифференцированного давления в каждый пневмоцилиндр удлинение их будет различным и вследствие этого будет происходить разворот основания в любом нужном направлении. В результате этого рука манипулятора принимает любое требуемое пространственное положение и захват берет предмет.
Наличие трубчатых вкладышей препятствует перекосам, смещениям телескопически установленных цилиндров, а также устраняет поперечное их колебание. Это обусловлено повышением поперечной жесткости тороидальных баллонов.
о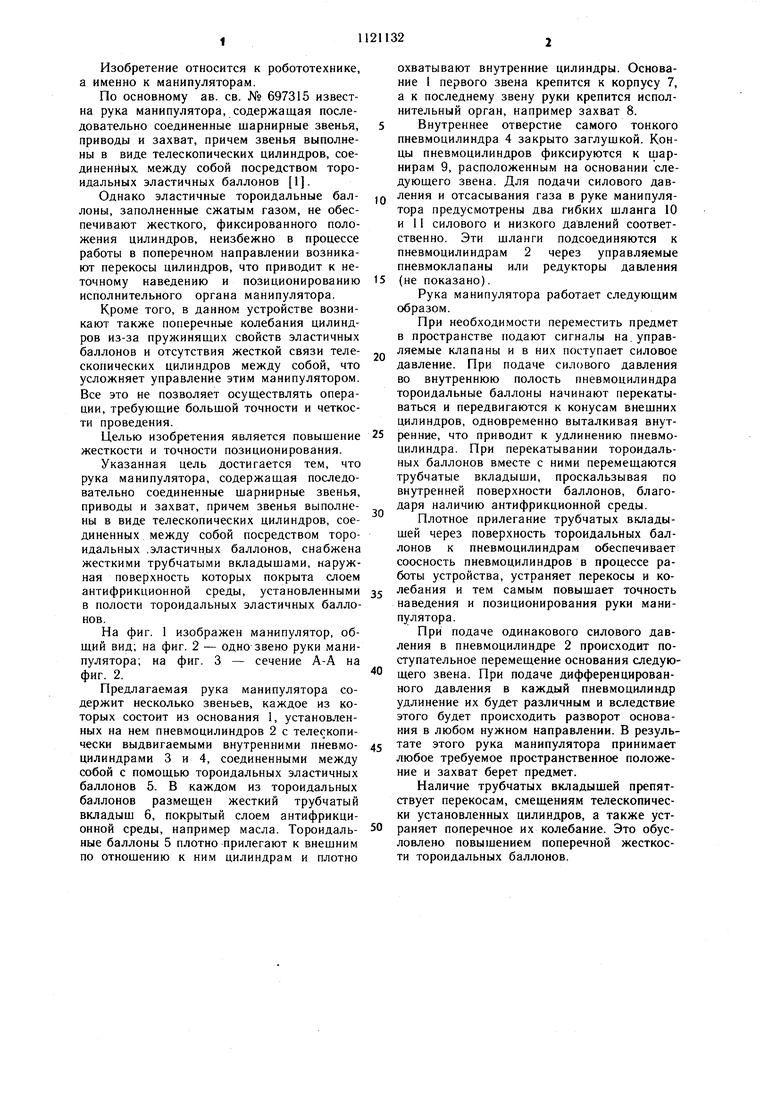
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1980 |
|
SU982896A2 |
| Рука манипулятора | 1978 |
|
SU697315A1 |
| Рука манипулятора | 1986 |
|
SU1364462A2 |
| АКТИВНЫЙ МОДУЛЬ СПИНЫ ЭКЗОСКЕЛЕТА | 2023 |
|
RU2825044C1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Манипулятор | 1987 |
|
SU1657369A1 |
| Манипулятор | 1986 |
|
SU1318394A1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| Манипулятор | 1979 |
|
SU837857A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022769C1 |
РУКА МАНИПУЛЯТОРА по авт. св. № 697315, отличающаяся тем, что с целью повышения жесткости и точности позиционирования, она снабжена жесткими трубчатыми вкладышами, наружная поверхность которых покрыта слоем антифрикционной среды, установленными в полости тороидальных эластичных баллонов. ю со ю
